模拟FPV-肥鲨HDO2+无牙仔2+熊猫VT5804ML1+Foxeer野火 时延测试
- 1. 源由
- 2. 测试方法
- 3. 测试视频
- 4. 测试数据
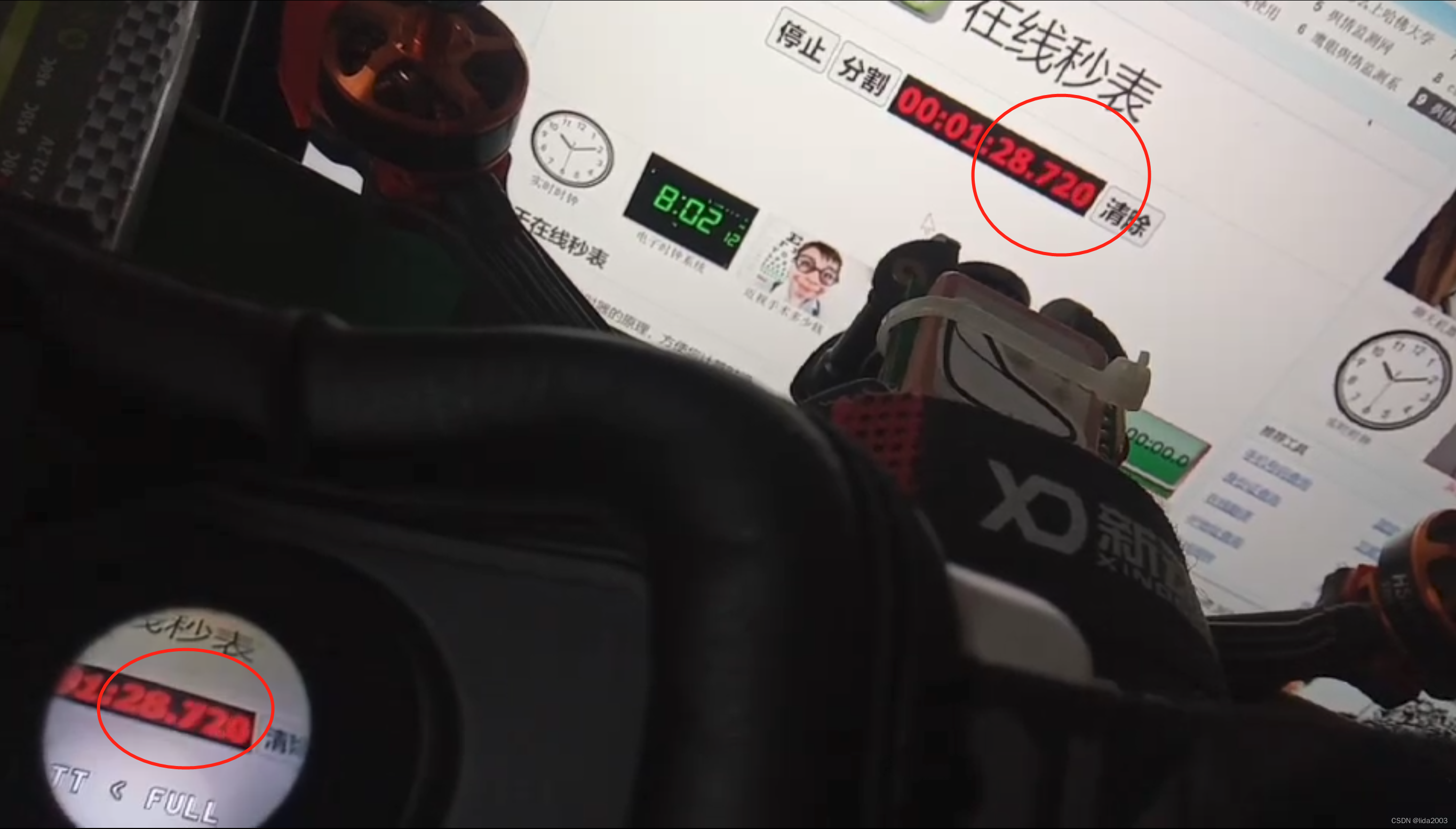
- 4.1 第一帧 时延 720 - 720 = 0 ms
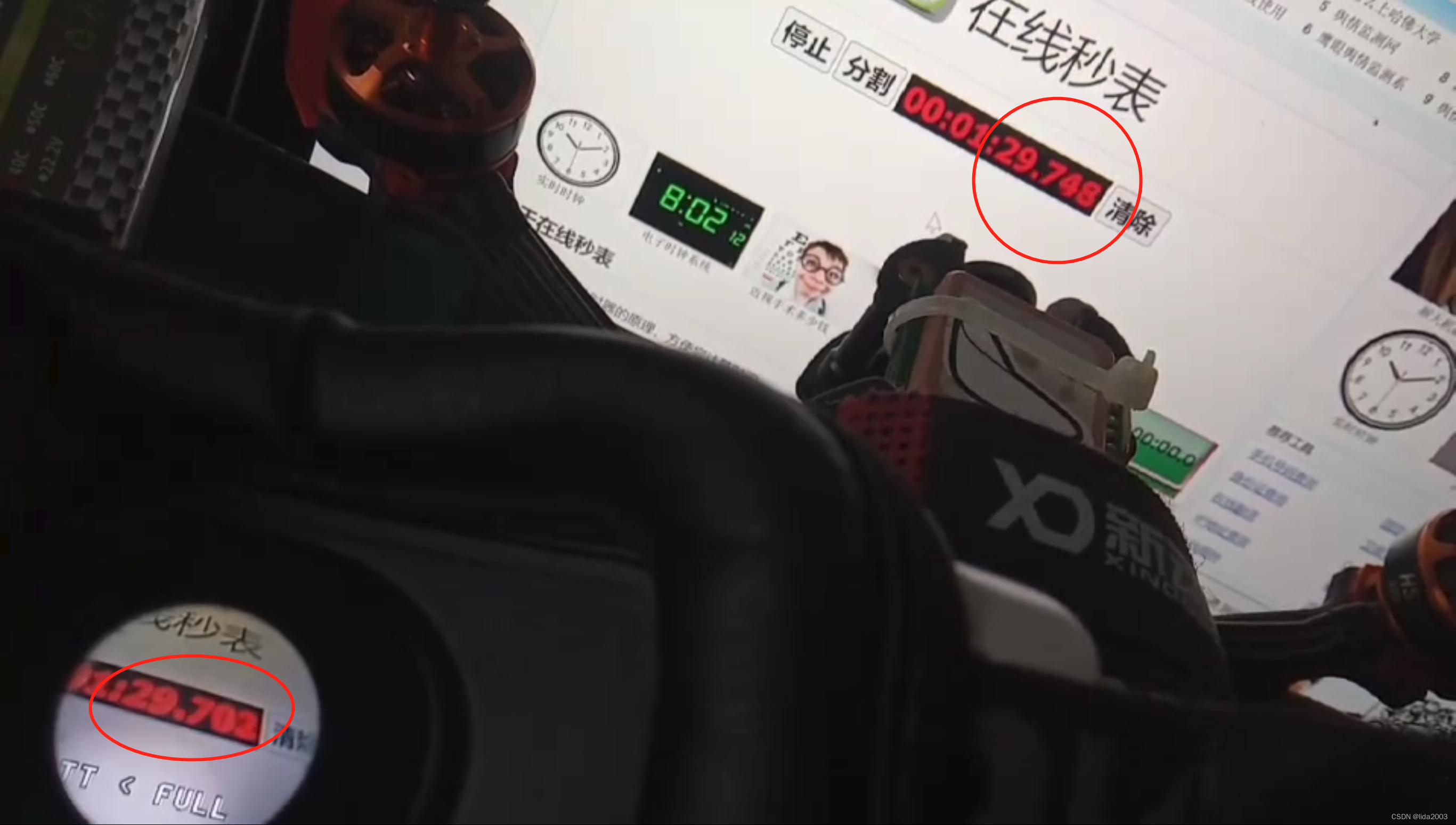
- 4.2 第二帧 时延 748 - 702 = 46 ms
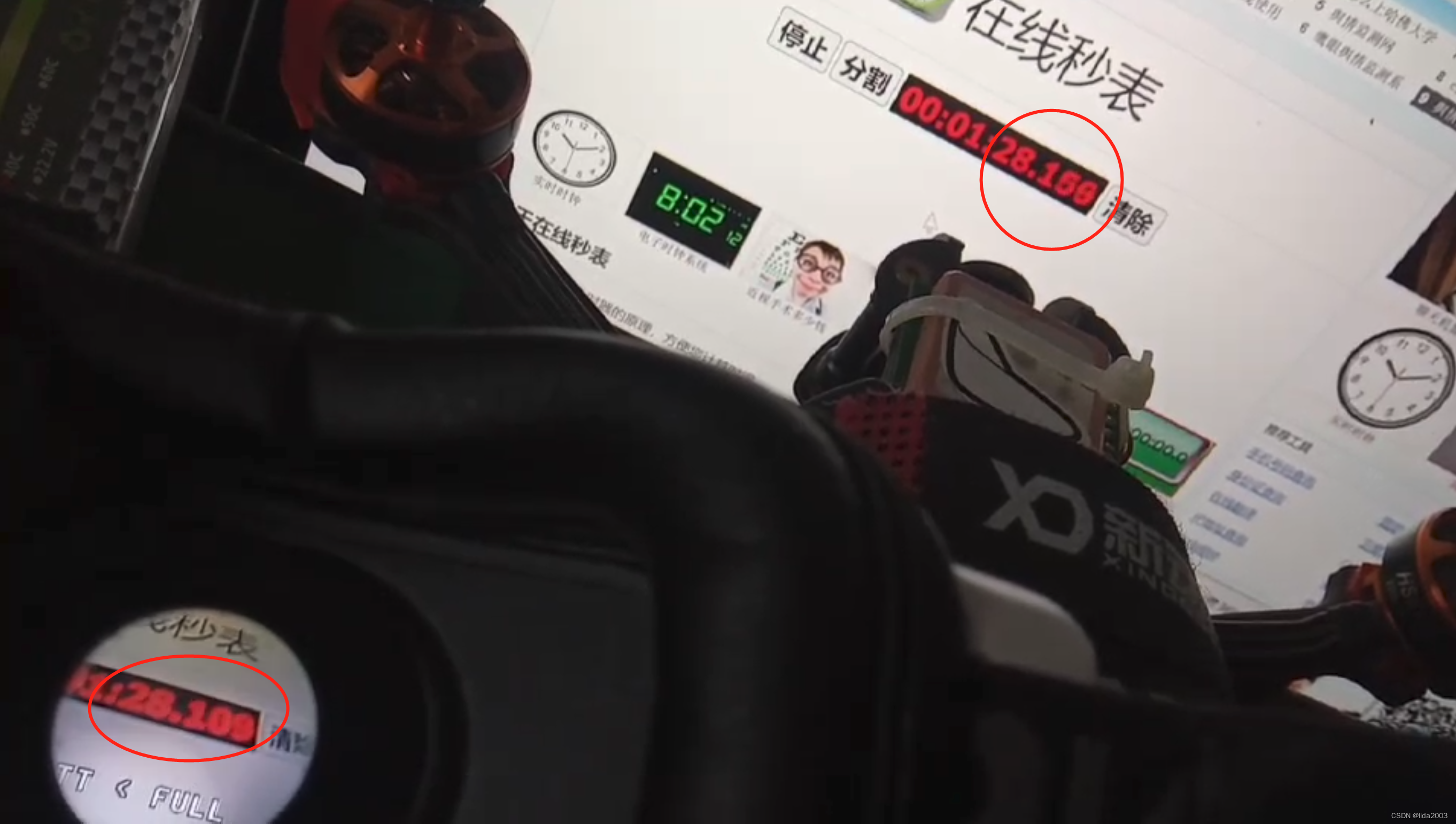
- 4.3 第三帧 时延 159 - 109 = 50 ms
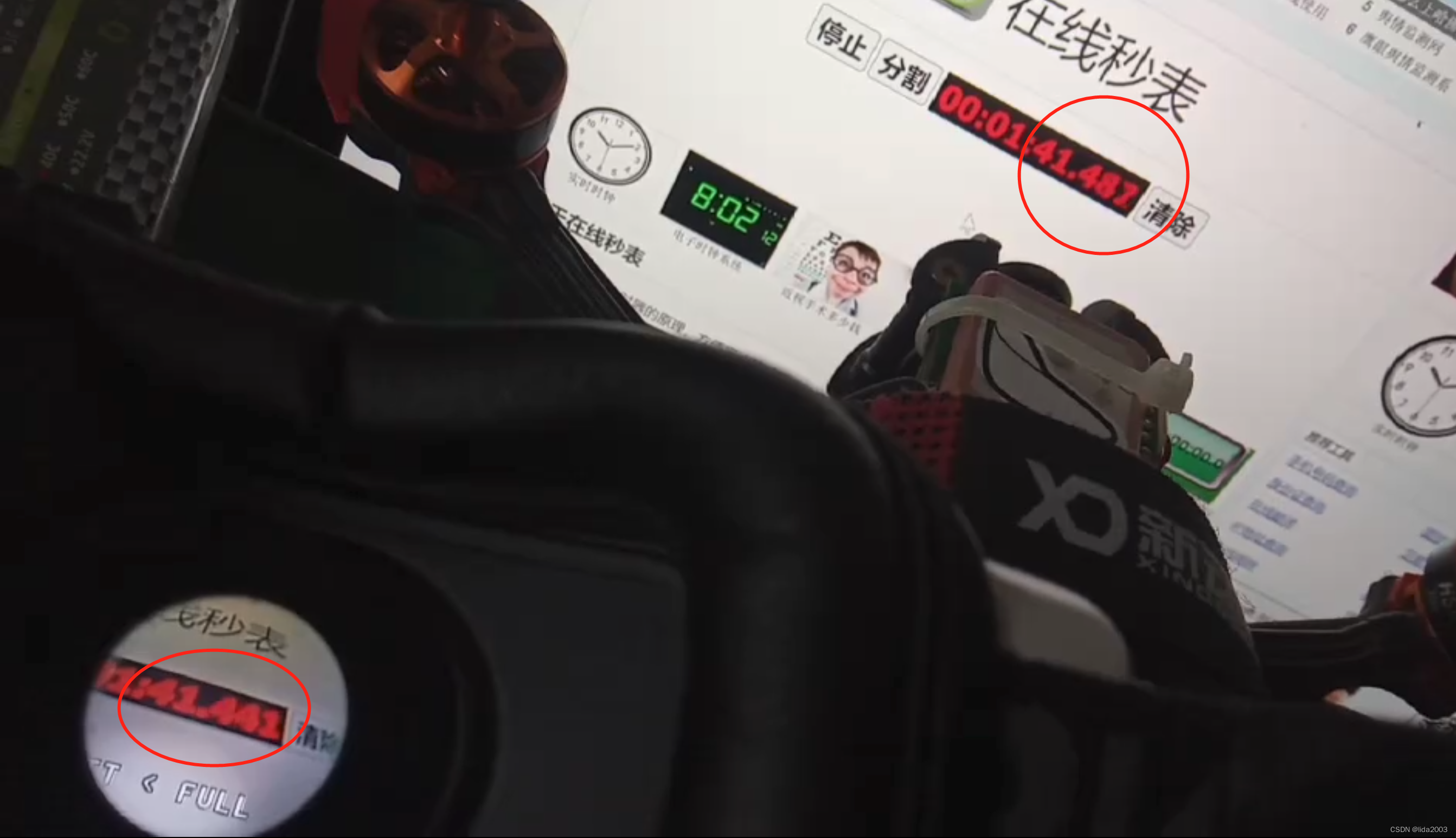
- 4.4 第四帧 时延 487 - 441 = 46 ms
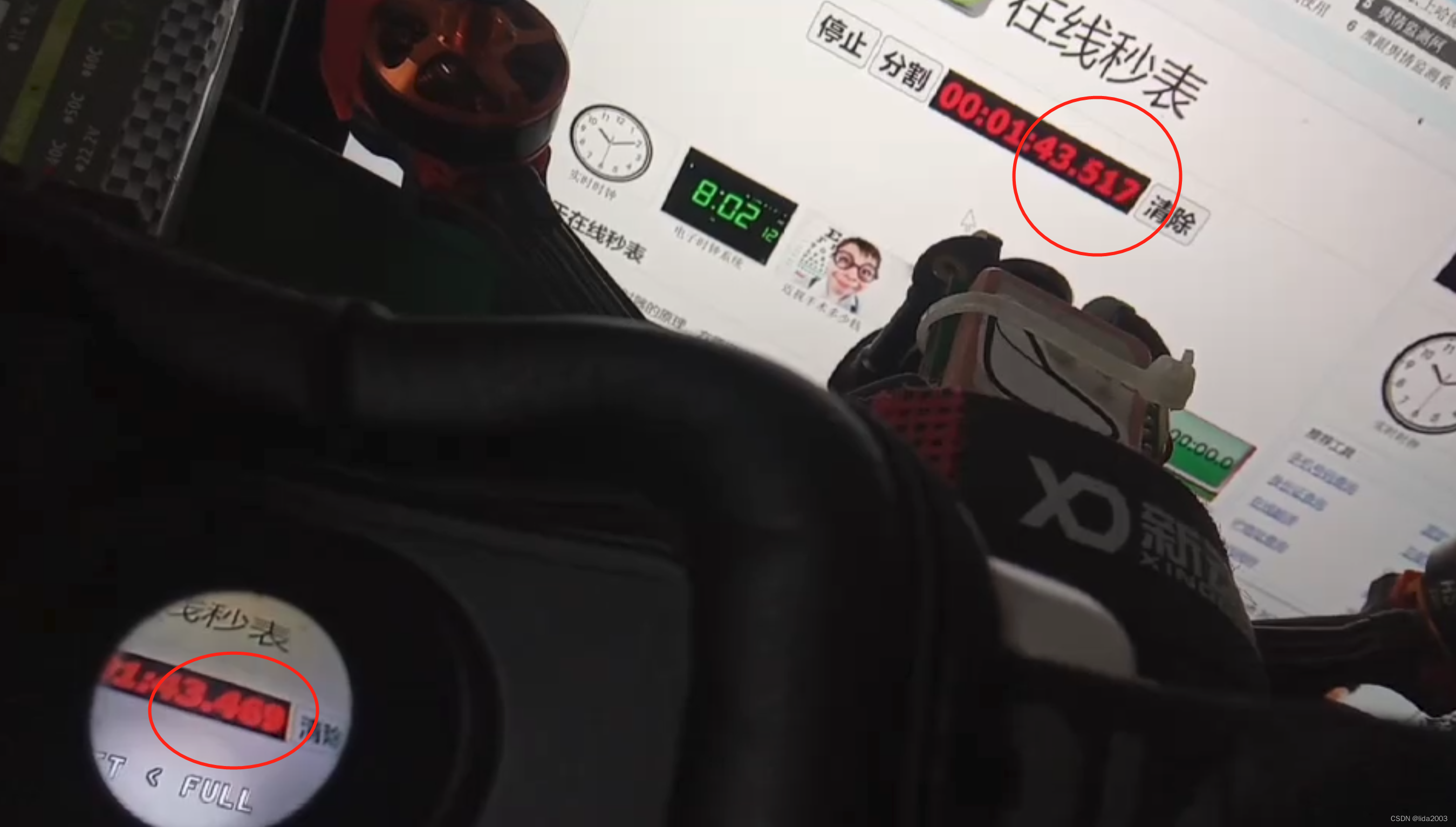
- 4.5 第五帧 时延 517 - 469 = 48 ms
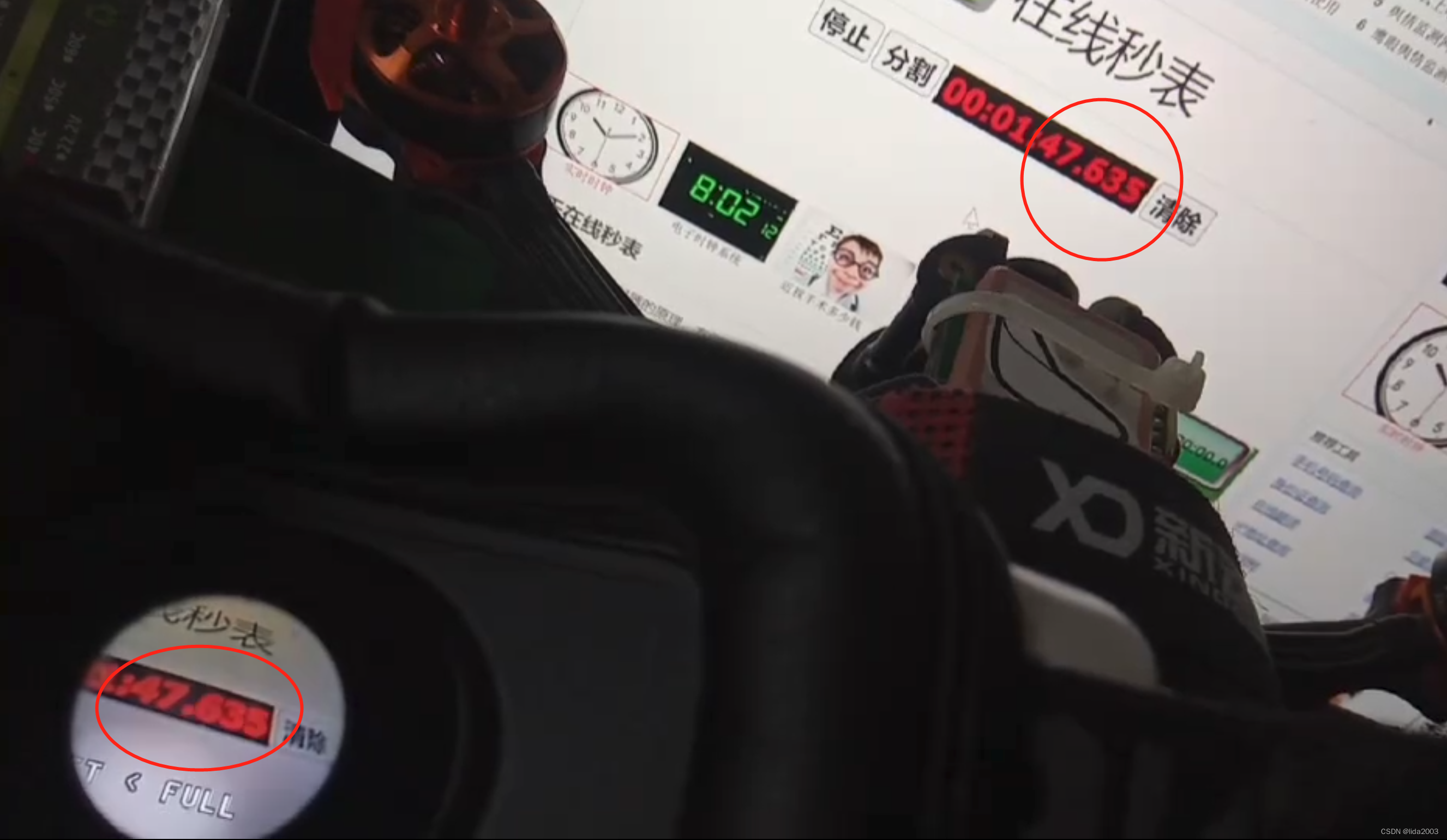
- 4.6 第六帧 时延 635 - 635 = 0 ms
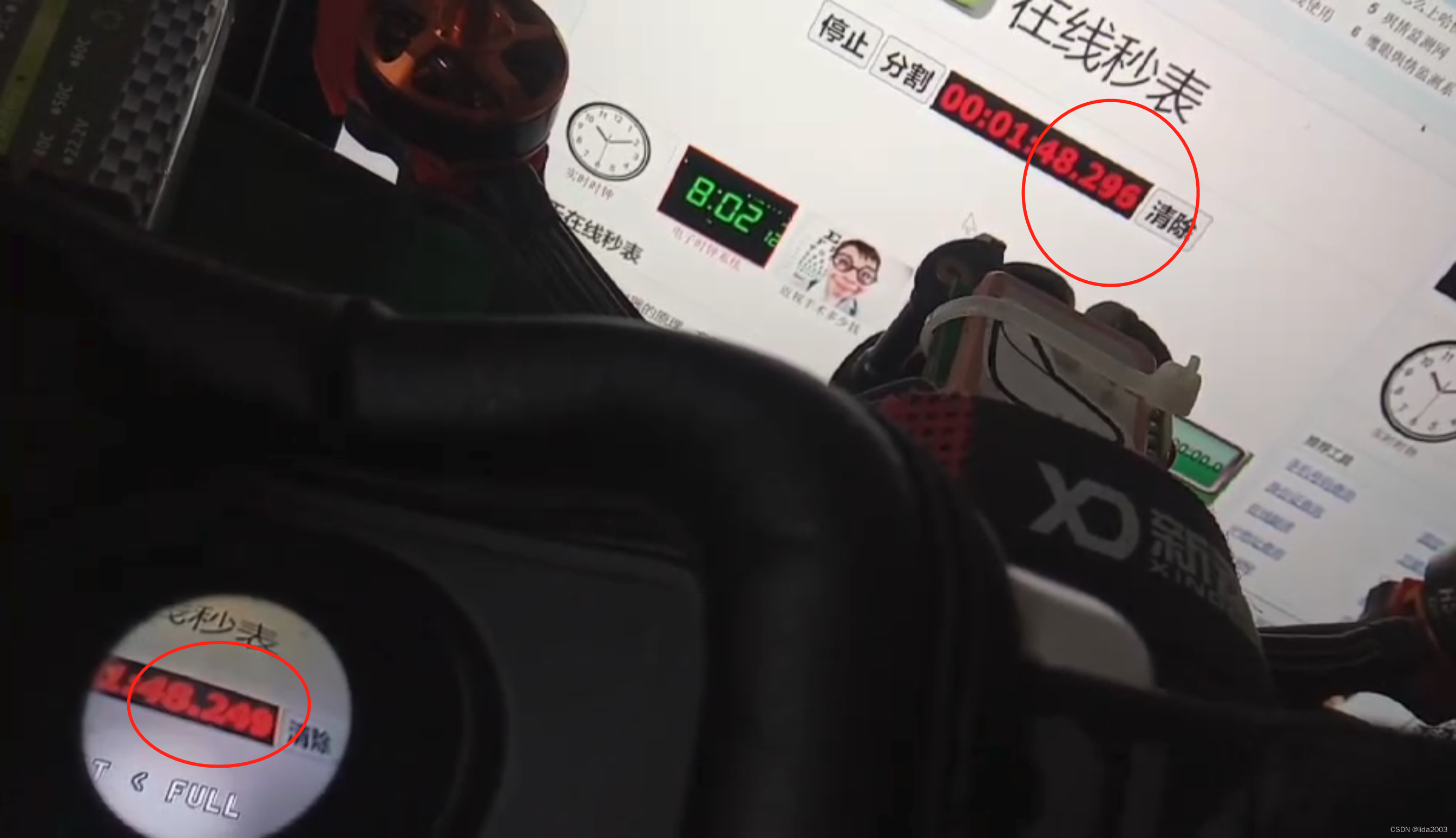
- 4.7 第七帧 时延 296 - 249 = 47 ms
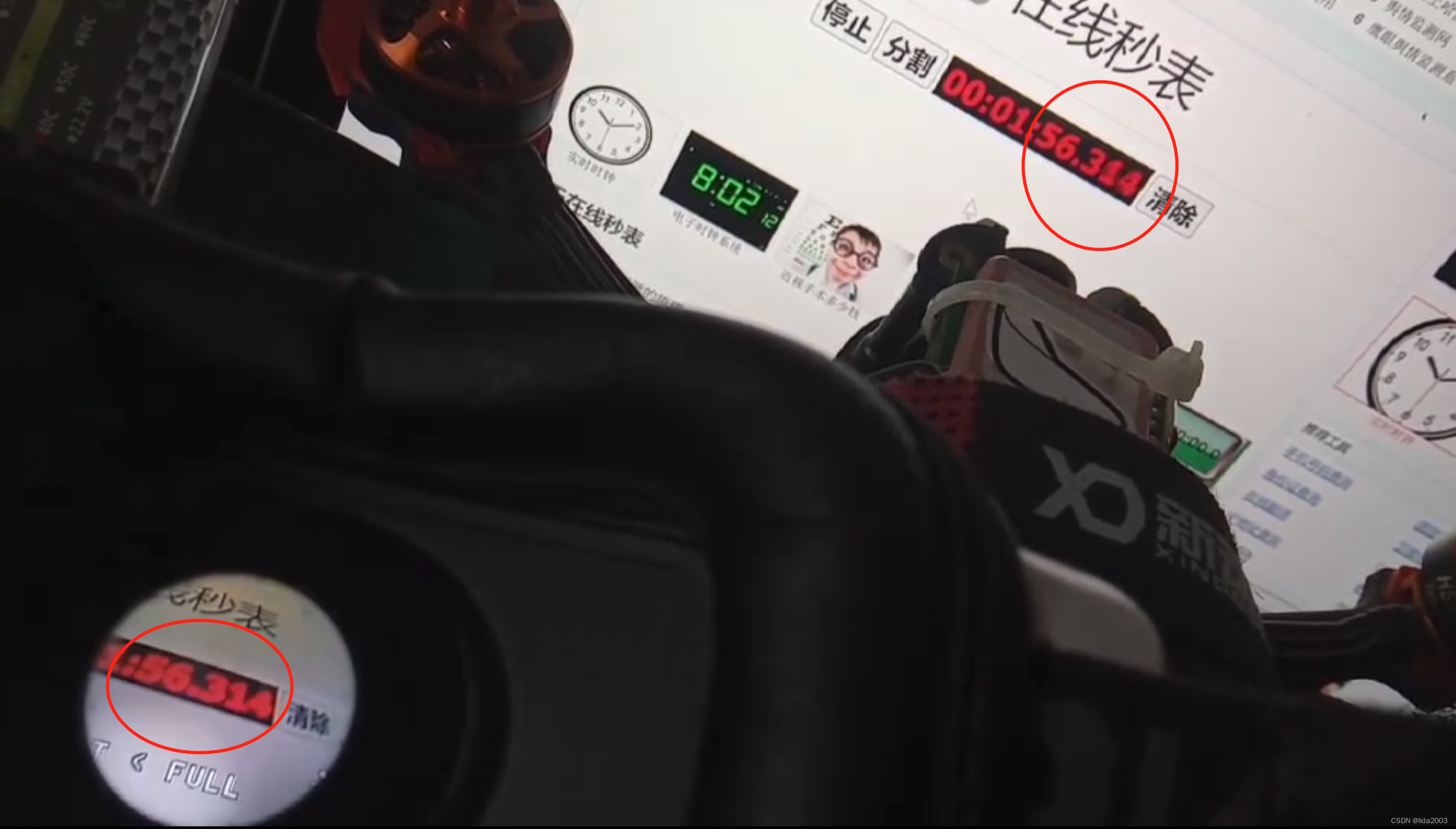
- 4.8 第八帧 时延 314 - 314 = 0 ms
- 4.9 第九帧 时延 775 - 728 = 47 ms
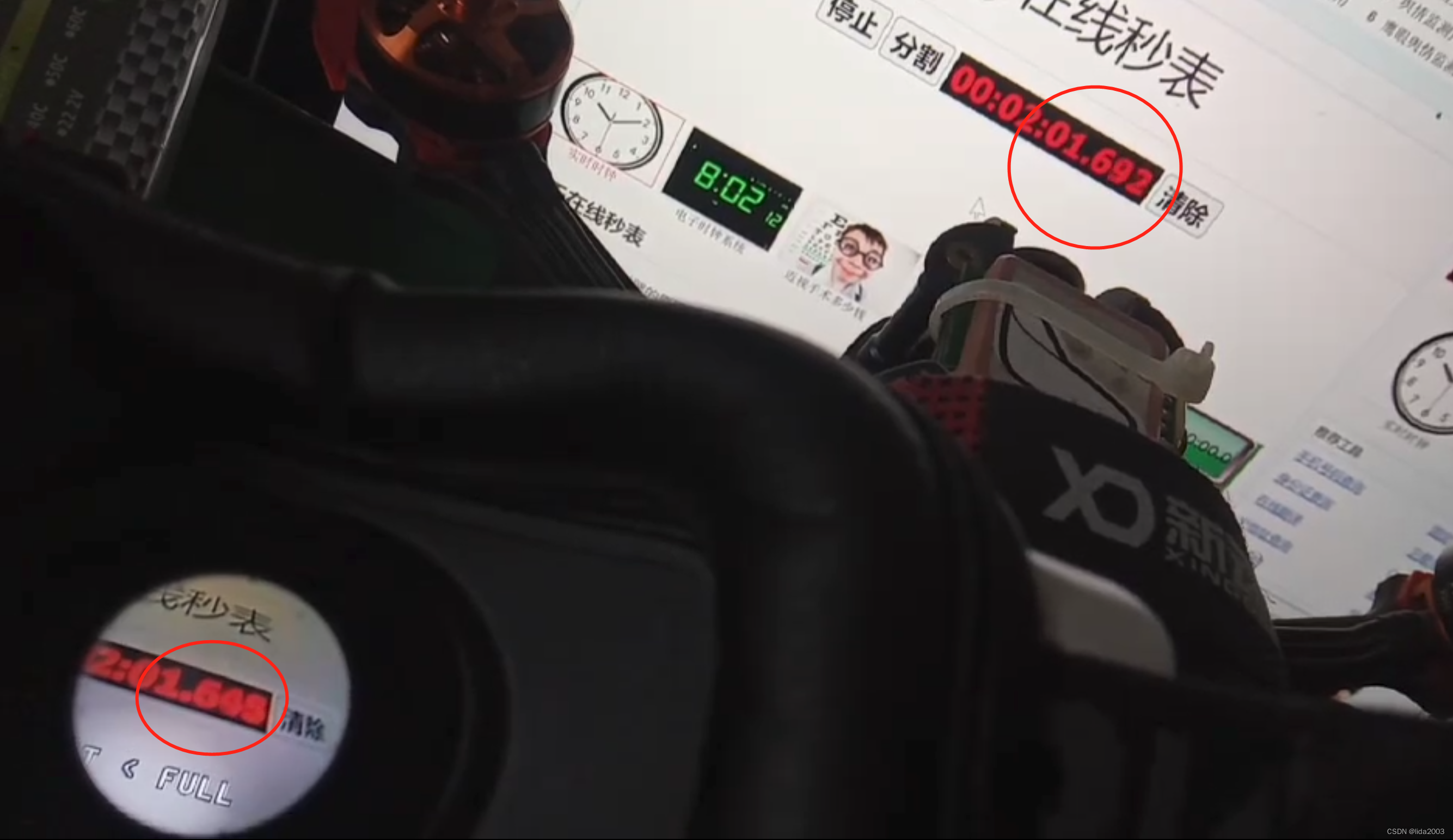
- 4.10 第十帧 时延 692 - 645 = 47 ms
- 5. 数据分析
- 6. 总结
- 7. 参考资料
1. 源由
FPV视频主要参数大概就是分辨率和时延,而传统模拟图传系统相对优秀的就是时延,而数字在高清方面会更加胜出(甚至可以加密)。
从主观角度简单测试下典型的FPV模拟图传系统时延情况。
2. 测试方法
这里测试方法相对来说比较简单:
- 手机视频记录(精度不高)
- 背景基本不变(数字有压缩算法等问题,模拟不考虑)
- 视频数据采集,模糊数据丢弃
- 测试秒表 //显示器
- 无牙仔2(摄像头)
- F405飞控
- 熊猫VT5804ML1(图传)
- Foxeer野火(接收机)
- 肥鲨HDO2
- 手机视频拍摄
3. 测试视频
4. 测试数据
截取部分典型数据
- 数字清晰
- 出现概率较高(比如:两个数据基本一致,0ms延时)
4.1 第一帧 时延 720 - 720 = 0 ms
4.2 第二帧 时延 748 - 702 = 46 ms
4.3 第三帧 时延 159 - 109 = 50 ms
4.4 第四帧 时延 487 - 441 = 46 ms
4.5 第五帧 时延 517 - 469 = 48 ms
4.6 第六帧 时延 635 - 635 = 0 ms
4.7 第七帧 时延 296 - 249 = 47 ms
4.8 第八帧 时延 314 - 314 = 0 ms
4.9 第九帧 时延 775 - 728 = 47 ms

4.10 第十帧 时延 692 - 645 = 47 ms
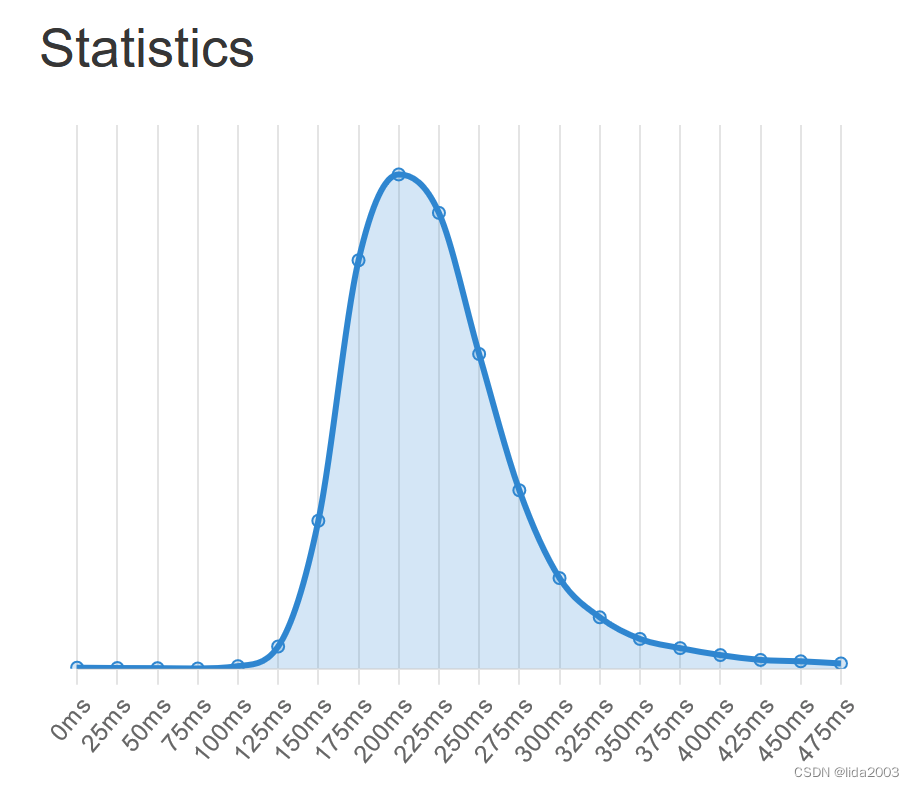
5. 数据分析
- 最大值 50 ms
- 最小值 0 ms
- 算数平均 33 ms
- 较大概率出现0 ms
- 手机视频 1080P 30FPS
第一帧 时延 720 - 720 = 0 ms
第二帧 时延 748 - 702 = 46 ms
第三帧 时延 159 - 109 = 50 ms
第四帧 时延 487 - 441 = 46 ms
第五帧 时延 517 - 469 = 48 ms
第六帧 时延 635 - 635 = 0 ms
第七帧 时延 296 - 249 = 47 ms
第八帧 时延 314 - 314 = 0 ms
第九帧 时延 775 - 728 = 47 ms
第十帧 时延 692 - 645 = 47 ms
6. 总结
总体上,模拟图传系统整体延时大约在30ms左右。人的视觉反应时间(看到到做出动作)大概在250ms左右。
500公里/小时 = 138.9米/秒 = 1.389米/10ms
300公里/小时 = 83.3米/秒 = 0.833米/10ms
100公里/小时 = 27.8米/秒 = 0.278米/10ms
50公里/小时 = 13.9米/秒 = 0.139米/10ms
因此从看到障碍物到做出动作,按照100公里/小时飞行速度计算,基本上已经飞过 (0.278/10) x (30 + 250) = 7.784米。
如果要规避障碍物,还需要考虑接到指令后规避动作需要的额外转向时间。因此,在实际花飞动作过程中,更多需要标准动作曲线和各种临时场景的提前预判来做组合,需要动作熟练度和肌肉记忆来配合完成(通常我们所说的“人车合一”的境界)。
7. 参考资料
【1】An Average Human Reaction Time
【2】How Fast is Real-Time? Human Perception and Technology
【3】FPV Camera(RPI3+V2.1) | wfb_ng Release 23.01 | ubuntu20.04 gnome软解测试
【4】FPV Camera(RPI3+V2.1) | wfb_ng Release 23.01 | Ubuntu 20.04 xfce软解测试
【5】FPV Camera(RPI 3B+/Zero W+V2.1) | wfb_ng Release 23.01 | H264硬解测试
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)