ArduPilot飞控之ubuntu22.04-SITL安装
- 1. 源由
- 2. SITL编译
- 2.1 准备ubuntu 22.04环境
- 2.2 更新ubuntu 22.04环境
- 2.3 克隆最新Ardupilot代码
- 2.4 submodule同步Ardupilot代码
- 2.5 Ardupilot-SITL编译准备
- 2.6 Ardupilot-SITL环境参数
- 2.7 Ardupilot-SITL编译
- 3. SITL运行
- 3.1 第一次SITL运行
- 3.2 正常启动SITL模拟器
- 3.3 Mission Planner连接
- 4. 参考资料
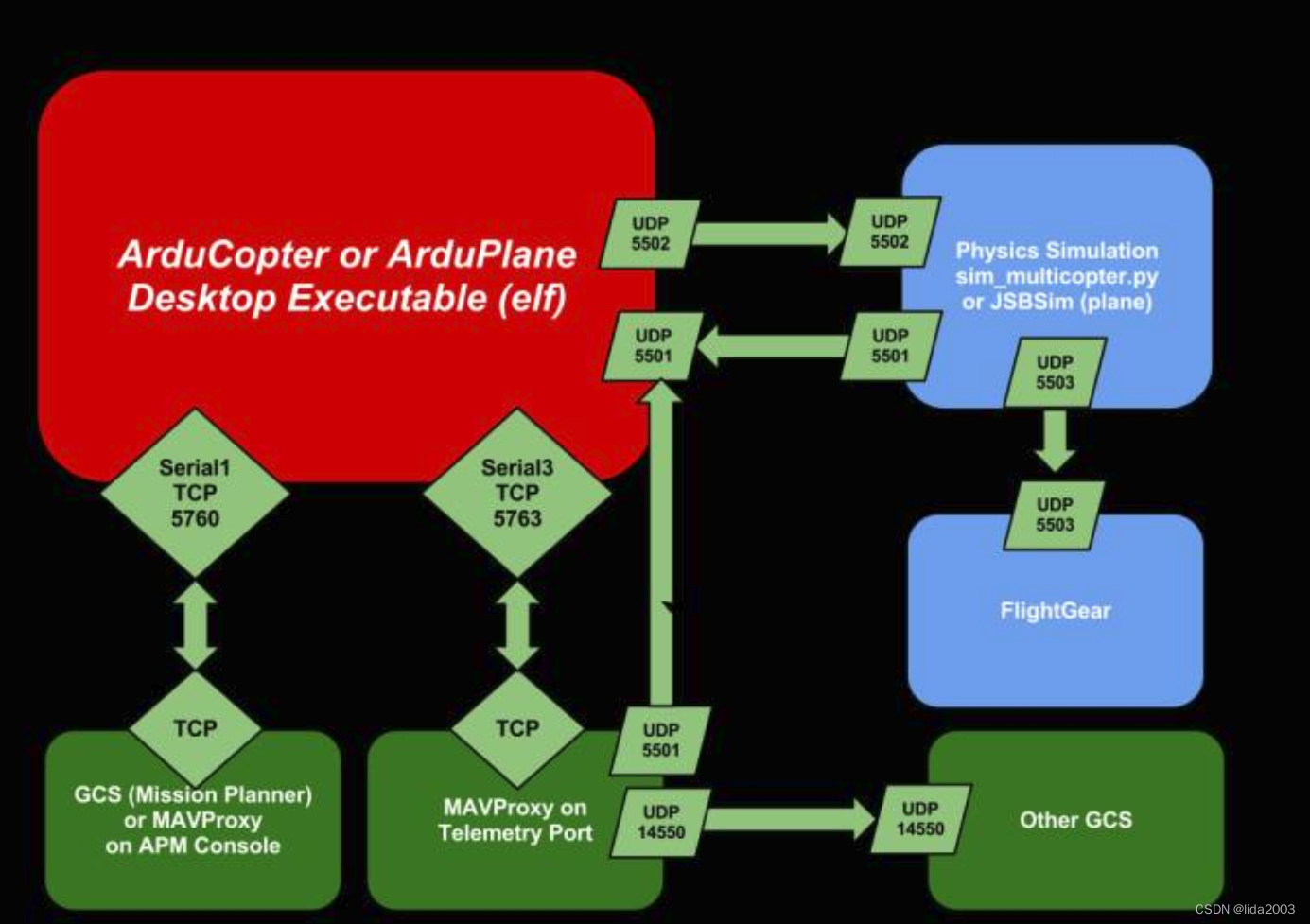
1. 源由
在没有任何硬件的情况下,SITL模拟运行Plane、Copter或Rover。提供了一个本地可执行文件(ArduCopter or ArduPlane Desktop Executable, elf),允许在没有硬件的情况下测试代码的行为。
该方法比较适合熟悉ardupilot系统,也便于研发人员验证软件算法方面的控制逻辑。
2. SITL编译
2.1 准备ubuntu 22.04环境
参考ubuntu22.04@laptop安装。
$ uname -r
5.15.76-051576-generic
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 22.04.2 LTS
Release: 22.04
Codename: jammy
2.2 更新ubuntu 22.04环境
$ sudo apt-get update
$ sudo apt-get upgrade
$ sudo apt-get install git gitk git-gui
2.3 克隆最新Ardupilot代码
$ git clone git@github.com:ArduPilot/ardupilot.git
$ git checkout Copter-4.3
$ git log -n 1
commit c33653cd4ebec780d6961c0bcbd42a38c787fb28 (HEAD -> Copter-4.3, origin/Copter-4.3)
Author: bugobliterator <siddharthbharatpurohit@gmail.com>
Date: Sat Mar 18 09:04:26 2023 +1100
bootloaders: add CubeOrangePlus-bdshot bootloader
2.4 submodule同步Ardupilot代码
$ cd ardupilot
$ git submodule update --init --recursive
2.5 Ardupilot-SITL编译准备
$ Tools/environment_install/install-prereqs-ubuntu.sh -y
2.6 Ardupilot-SITL环境参数
$ pwd
/home/daniel/Work/ardupilot
$ export PATH=$PATH:<ardupilot path>/Tools/autotest
$ export PATH=/usr/lib/ccache:$PATH
$ . ~/.profile
2.7 Ardupilot-SITL编译
如果之前工程有过编译或者编译缺少组件导致失败,可以用以下命令对工程进行清理。
$ ./waf clean
配置SITL目标
$ ./waf configure --board sitl
or
$ ./waf configure --board sitl --debug
编译SITL目标
$ ./waf
3. SITL运行
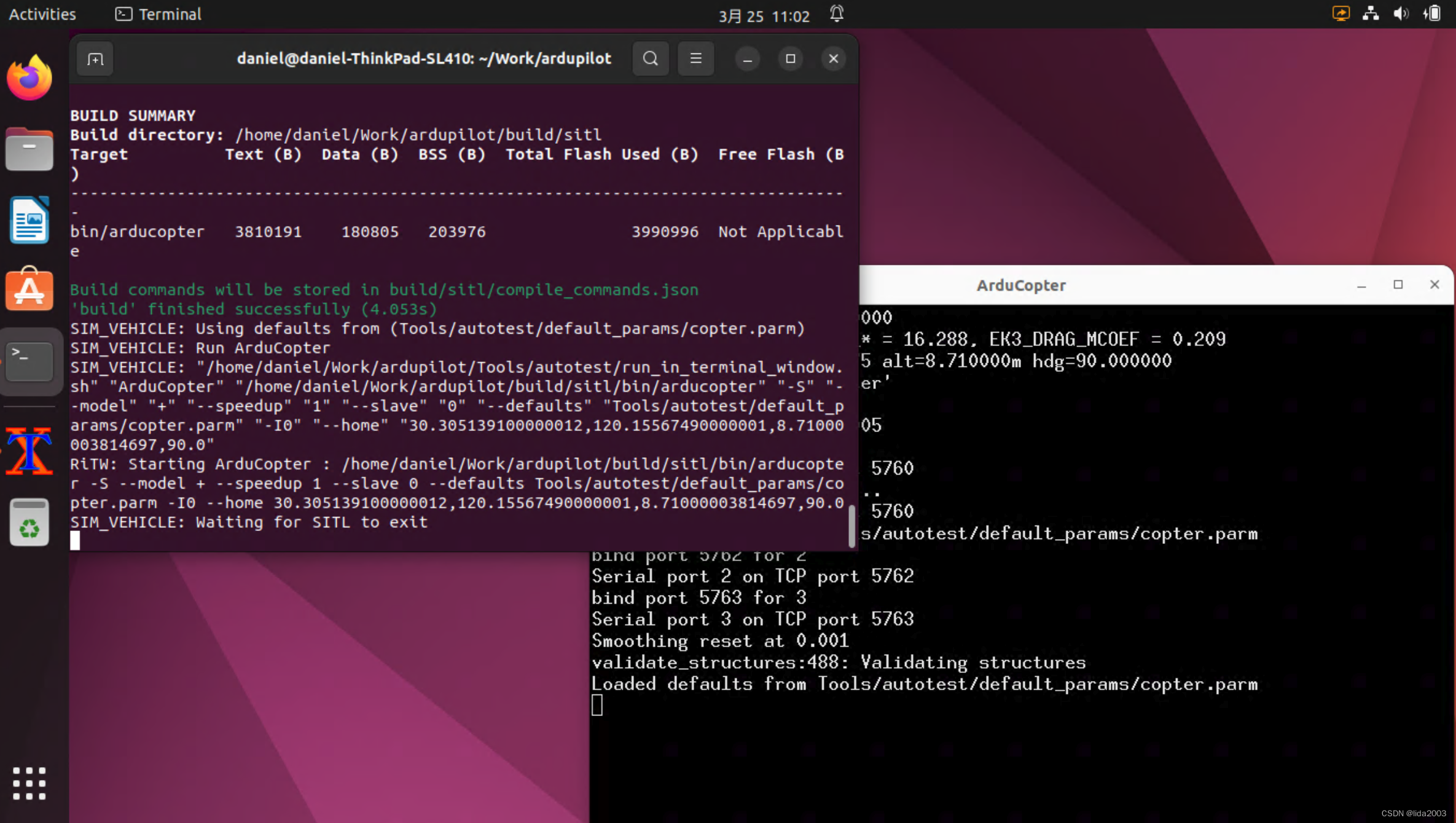
3.1 第一次SITL运行
第一次运行时,应该使用-w选项擦除虚拟EEPROM,加载正确的默认参数。
$ sim_vehicle.py -w -v ArduCopter
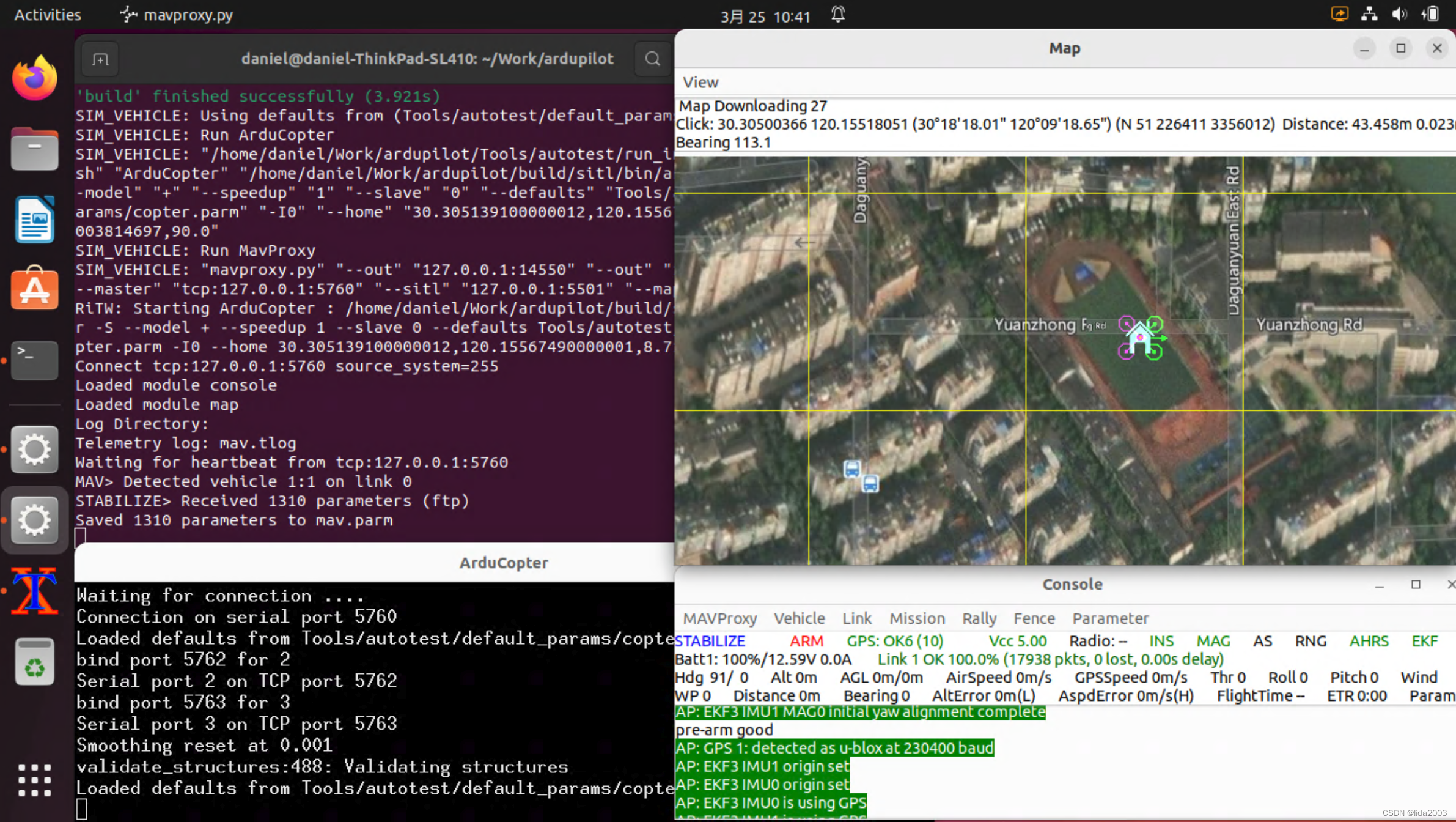
3.2 正常启动SITL模拟器
加载默认参数后,可以正常启动模拟器。
$ sim_vehicle.py --console --map -v ArduCopter
or
$ sim_vehicle.py --console --map -v ArduCopter --custom-location=30.3051391,120.1556749,8.71000003814697,90
注: Ctrl-C停止模拟器运行。
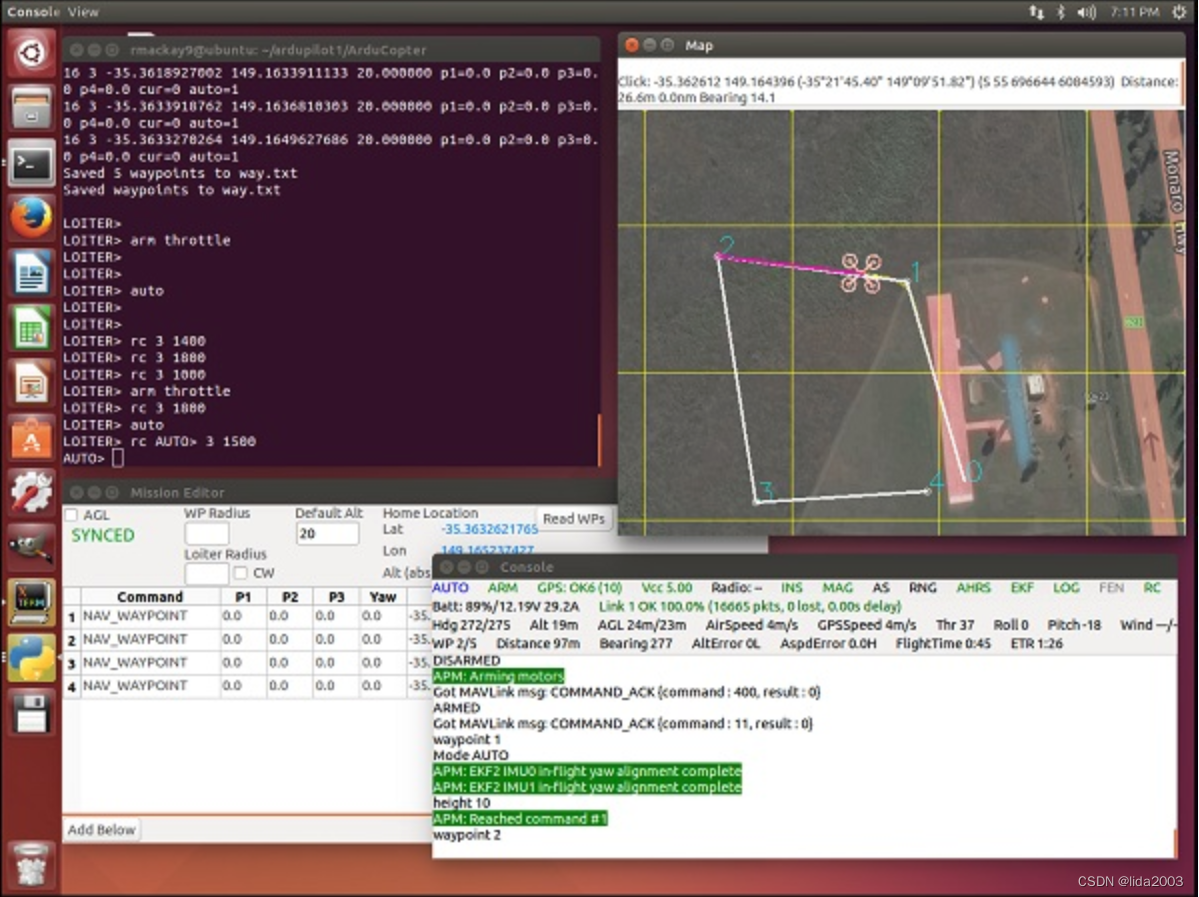
3.3 Mission Planner连接
- 使用
--no-mavproxy启动模拟器
$ sim_vehicle.py --console --map -v ArduCopter --custom-location=30.3051391,120.1556749,8.71000003814697,90 --no-mavproxy
- 使用TCP 5760端口连接
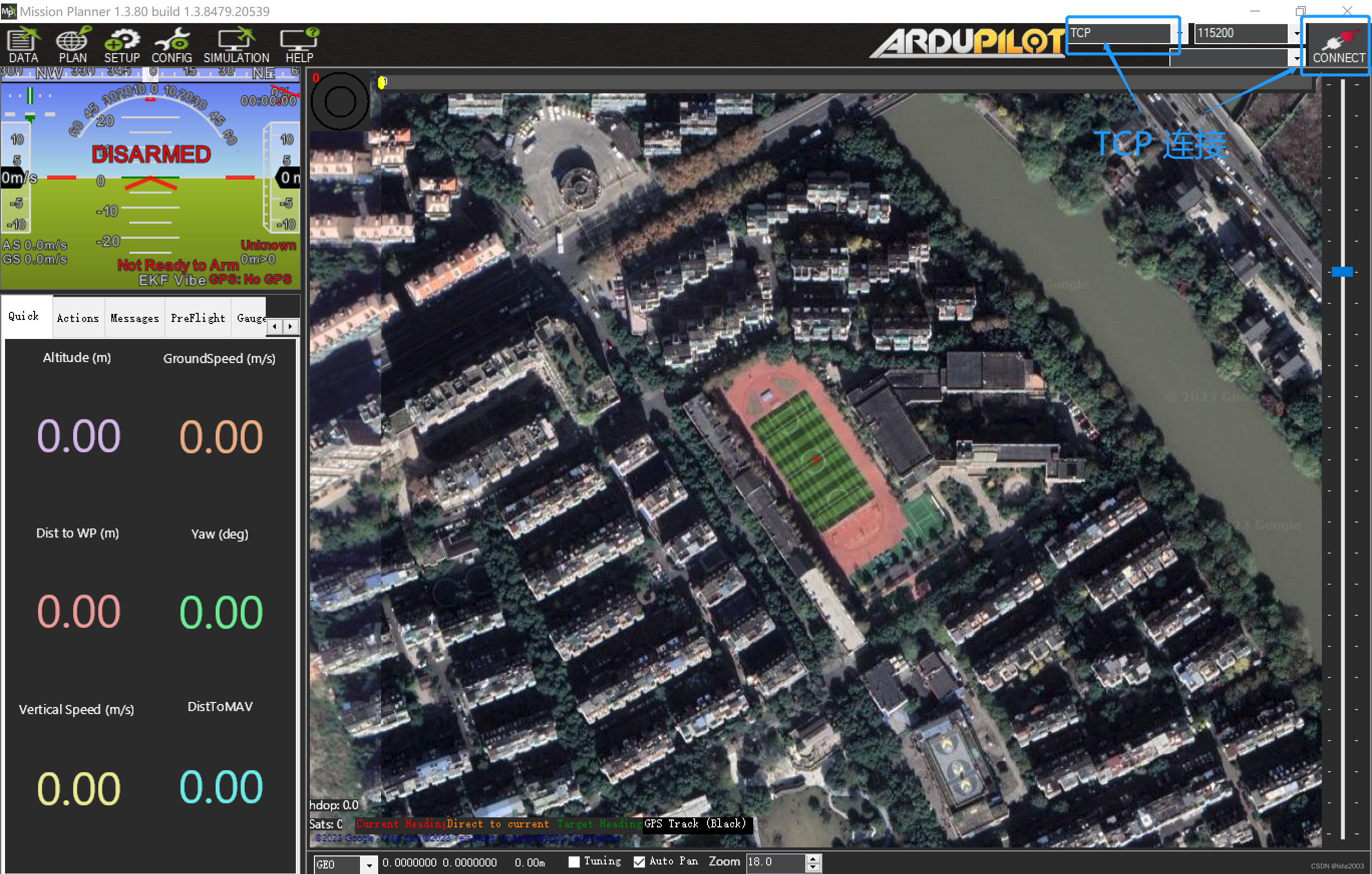

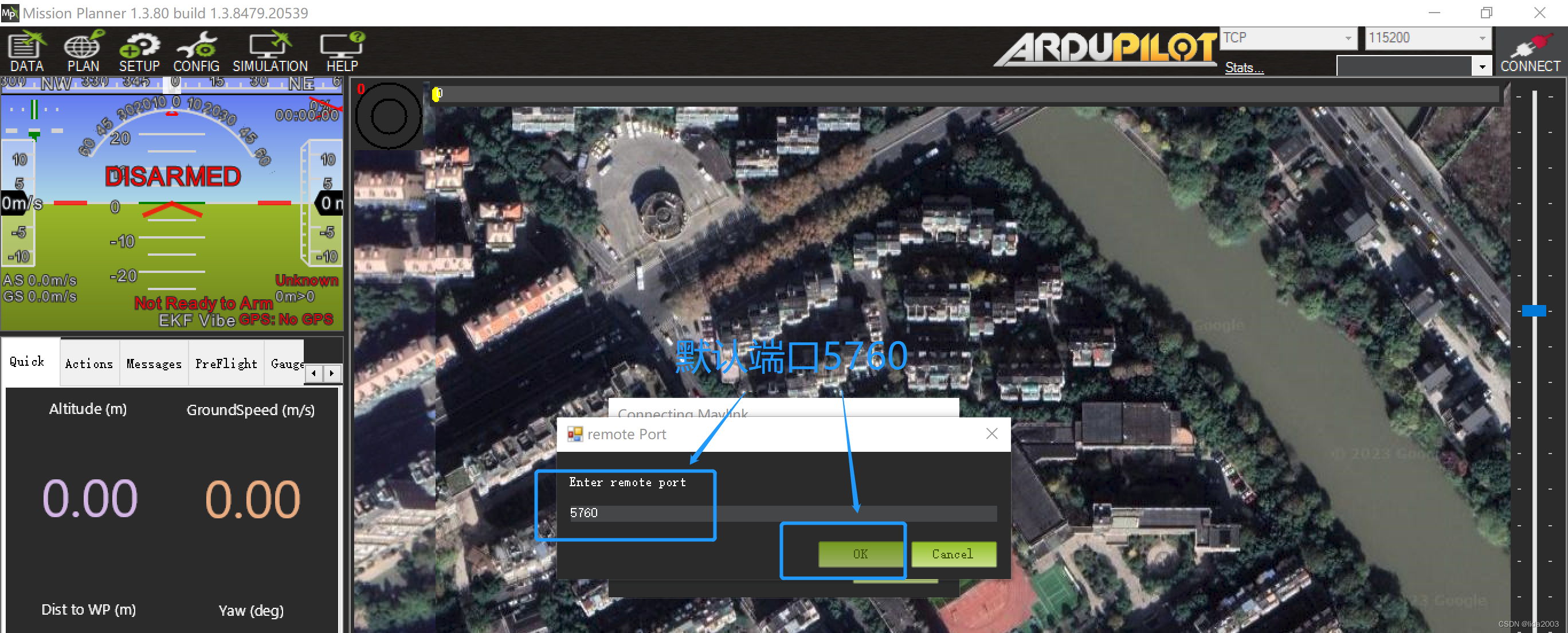
后续Mission Planner上的操作,详见:ArduPilot飞控之Mission Planner模拟
4. 参考资料
【1】Setting up SITL on Linux
【2】ArduPilot飞控之Mission Planner模拟
【3】ubuntu22.04@laptop安装&配置wfb-ng
【4】ArduPilot飞控之Mission Planner模拟
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)