跟随原理
下面介绍红外感应的跟随小车的自动跟随部分。
基本原理:在小车上安装一个红外接收器(能测量红外入射角的感应器),人手持一个红外发射模块。
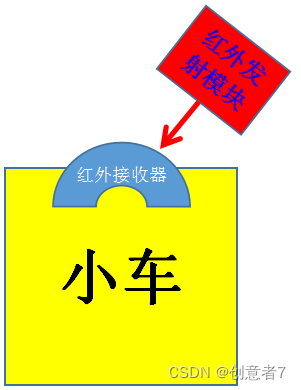
根据不同的入射角,调整小车前进方向。若入射角在右边,就控制小车右转,若入射角在左边,就控制小车左转。
效果展示
百度网盘链接:https://pan.baidu.com/s/1PGTwDxvUbdksDmyfcXAMOw?pwd=vddg
提取码:vddg
代码
以ESP32芯片(Arduino开发环境)为例。
void loop() {
if (millis() - Run_Time > 200) {
Run_Time = millis();
LeftSpeed = 0; RightSpeed = 0;
PineMotorRun(0);
}
GetIRData(&Angle, &Distance);
if (Distance > 30 && Angle > 0 && Angle < 180) {
LeftSpeed = 50 - (Angle - 90) * 0.5;
RightSpeed = 50 + (Angle - 90) * 0.5;
PineMotor_Run(LeftSpeed, RightSpeed);
Run_Time = millis();
OutStr = "L/R speed:" + String(LeftSpeed) + "," + String(RightSpeed);
}
}
红外感应代码 "IRSensor.h"
#ifndef __IRSENSOR_H__
#define __IRSENSOR_H__
#define IRPINCOUNT 7
#define MaxIRShotCount 300
#define MaxHistoryCount 10
#define InValidAngle -360.0
struct IRSENSOR_DATA{
uint16_t IRCount[IRPINCOUNT];//红外感应器接受的脉冲数
uint16_t IRValidCount[IRPINCOUNT];//红外感应器接受的有效脉冲数(脉冲间隔时间满足一定的范围)
int IRTimeHistory[IRPINCOUNT][MaxIRShotCount];//红外感应器接受到脉冲时的时刻,单位为微秒
long FirstTime[IRPINCOUNT];//单个感应器的首次脉冲时刻,单位为微秒
long LastTime[IRPINCOUNT]; //单个感应器的最后脉冲时刻,单位为微秒
long IRFirstTime, IREndTime;//整组感应器的首次,最后脉冲时刻,单位为微秒
uint8_t ValidPinCount;//接受到有效信息的红外感应器个数
double IRZone;
double IRDistance;
};
//红外感应器初始化
void iniIR();
static void IRPinCallBack(uint8_t i);
void DisableIRInterrupt();
void ResetIRSensorData();
void ResetIRData();
void ResetIRSensorData();
long GetFirstIRTime_ms();
long GetFinalIRTime_ms();
double CalculateAngleMovingMean(uint8_t LastCount);
void SumIRDataLoop();
void GetIRDataFromPin();//NotConfirmTime
double GetIRAngle();
void GetIRData(double *angle, int *distance);
String GetIRSignalStatus();
uint8_t GetHighLevelPinCount(uint16_t IRCount[], uint16_t LL);
void AnalysisIRValues_OneSide(IRSENSOR_DATA* mData, uint8_t Angle[]);
void RecordIRData(double Currentdata);
void GetValidCount(IRSENSOR_DATA* mData);
void Record_DoubleArray(double DArray[], double mydata, uint8_t * index, uint8_t Length);
void Push_DoubleArray(double History[], int Length);
void Reset_Array16(uint16_t IRCount[], int Length);
#endif
红外感应代码 “IRSensor.cpp”
#include <Arduino.h>
#include "IRSensor.h"
struct IRSENSOR_DATA mIRData;
int LineCount, Count2 = 0;
bool IsIniIRPin = false, IsReceivedIRData = false;
char strIR[140], Head[] = {"Angle:"};
//IR, Pin从左到右,角度从大到小
uint8_t IRPin[] = {33, 32, 34, 35, 23, 21, 19}; //
uint8_t Angle_Pin[] = {165, 140, 115, 90, 65, 40, 15};
bool IsHaveIRData = false, IsInNearArea = false;
double IRAngleHistory[MaxHistoryCount];
uint8_t IRRecordIndex = MaxHistoryCount - 1;
char IRs[256];
String IRStatus, AngleStatus, IRResponseTime_String, IRTimeStatus;
long LastTime_AnalysisData;
bool IsFinishAnalysis;
long SimulatedTime;
//
static void IRPinCallBack(uint8_t i) {
long CurrentTime = micros();
if (!IsHaveIRData) {
mIRData.IRFirstTime = CurrentTime;
}
if (IsFinishAnalysis) {
IsFinishAnalysis = false;
}
mIRData.IREndTime = CurrentTime;
if (mIRData.IRCount[i] < MaxIRShotCount) {
if (mIRData.IRCount[i] == 0) {
mIRData.FirstTime[i] = CurrentTime;
mIRData.IRTimeHistory[i][mIRData.IRCount[i]] = 0;
mIRData.LastTime[i] = CurrentTime;
} else {
mIRData.IRTimeHistory[i][mIRData.IRCount[i]] = CurrentTime - mIRData.LastTime[i];
}
mIRData.LastTime[i] = CurrentTime;
mIRData.IRCount[i]++;
} else {
mIRData.IRCount[i] = 0;
}
IsHaveIRData = true;
}
//
///
void IRAM_ATTR IntCallbackIR0() {
uint8_t i = 0;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR1() {
uint8_t i = 1;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR2() {
uint8_t i = 2;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR3() {
uint8_t i = 3;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR4() {
uint8_t i = 4;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR5() {
uint8_t i = 5;
IRPinCallBack(i);
}
void IRAM_ATTR IntCallbackIR6() {
uint8_t i = 6;
IRPinCallBack(i);
}
///
void SumIRDataLoop() {
if (IsHaveIRData && !IsFinishAnalysis && (millis() - GetFirstIRTime_ms() > 30)) {
//一个发射周期是200毫秒,一个脉冲105*2微妙,共25个脉冲,共5.26毫秒。 在30毫秒后分析数据
LastTime_AnalysisData = millis();
GetIRDataFromPin();
IsFinishAnalysis = true;
}
if (millis() - LastTime_AnalysisData > 200) {
ResetIRData();
}
}
void GetIRDataFromPin() {
String IRstr = "";
IRStatus = "";
//SimulateIRData();
if ( GetHighLevelPinCount(mIRData.IRCount, MaxHistoryCount) >= 6) {
IsInNearArea = true;
//Serial.printf("近距离\n");
}
AnalysisIRValues_OneSide(&mIRData, Angle_Pin);
char SS[256];
sprintf(SS, "Angle:%.2f\r\n", mIRData.IRZone);
IRstr = String(SS);
if (IsInNearArea) {
IRstr += "IRD:30\r\n";
mIRData.IRDistance = 30;
} else {
IRstr += "IRD:500\r\n";
mIRData.IRDistance = 500;
}
IRstr += IRStatus;
//Serial.print(IRstr);
ResetIRSensorData();
}
double CalculateAngleMovingMean(uint8_t LastCount) {
double sum = 0, validcount = 0;
uint8_t i;
if (LastCount > MaxHistoryCount) LastCount = MaxHistoryCount;
for (i = 1; i <= LastCount; i++) {
if (0 <= IRAngleHistory[MaxHistoryCount - i] && IRAngleHistory[MaxHistoryCount - i] <= 180 ) {
sum += IRAngleHistory[MaxHistoryCount - i];
validcount++;
}
}
if (validcount > 1) {
return sum / validcount;
} else {
return -1;
}
}
String GetIRSignalStatus() {
return IRStatus;
}
String GetIRResponseTime() {
return IRResponseTime_String;
}
double GetIRAngle() {
return mIRData.IRZone;
}
void GetIRData(double *angle, int *distance) {
*angle = mIRData.IRZone;
*distance = mIRData.IRDistance;
}
void ResetIRData() {
mIRData.IRZone = InValidAngle;
mIRData.IRDistance = 0;
IRStatus = "";
IRResponseTime_String = "";
IsReceivedIRData = false;
}
void ResetIRSensorData() {
uint8_t i;
for (i = 0; i < IRPINCOUNT; i++) {
mIRData.IRCount[i] = 0;
}
long TempTime;
TempTime = micros();
for (i = 0; i < IRPINCOUNT; i++) {
mIRData.IRTimeHistory[i][0] = 0;
uint16_t j;
for (j = 0; j < MaxIRShotCount; j++) {
mIRData.IRTimeHistory[i][j] = 0;
}
mIRData.LastTime[i] = TempTime + 20 * 1000;
mIRData.FirstTime[i] = TempTime + 20 * 1000;
}
mIRData.ValidPinCount = 0;
IsHaveIRData = false;
IsInNearArea = false;
}
uint8_t GetHighLevelPinCount(uint16_t IRCount[], uint16_t LL) {
uint8_t i, Count = 0;
for (i = 0; i < IRPINCOUNT; i++) {
if (IRCount[i] > LL) {
Count++;
}
}
return Count;
}
void AnalysisIRValues_OneSide(IRSENSOR_DATA *mData, uint8_t Angle[]) {
uint16_t i, j;
boolean IsAbnormal = false;
double AngleMean = InValidAngle, AngleSum = 0.0; //arduino无float型数据
int CountSum = 0, ValidCountSum = 0;
String IRStr = "", SideStr = "";
SideStr = "IR:";
IRStr = SideStr;
for (i = 0; i < IRPINCOUNT; i++) {
IRStr += String(mData->IRCount[i]) + ",";
CountSum += mData->IRCount[i];
}
IRStr += "Valid:";
if (CountSum <= 4) { //偶尔几个脉冲,无需理会
for (i = 0; i < IRPINCOUNT; i++) {
mData->IRValidCount[i] = 0;
IRStr += "0,";
}
IRStr += "\r\n";
IRStatus += IRStr;
//Serial.println(IRStatus);
mData->IRZone = InValidAngle;
//Serial.println("No IR Signal.");
return;
}
// Serial.printf("Signal Count: %d \n", CountSum);
boolean isCheckPulseTime = false;
String strOut;
if (isCheckPulseTime) {
GetValidCount(mData);
} else {
for (i = 0; i < IRPINCOUNT; i++) {
mData->IRValidCount[i] = mData->IRCount[i];
}
}
ValidCountSum = 1;//相除时,不会是0
for (i = 0; i < IRPINCOUNT; i++) {
IRStr += String(mData->IRValidCount[i]) + ",";
ValidCountSum += mData->IRValidCount[i];
}
IRStr += "\r\n";
IRStatus += IRStr;
// Serial.println(IRStr);
for (i = 0; i < IRPINCOUNT; i++) {
if ( mData->IRCount[i] > 100) { //脉冲太多,是干扰信号
IsAbnormal = true;
mData->IRZone = InValidAngle;
break;
}
}
if (CountSum / ValidCountSum >= 3) { //少于33%的有效脉冲,极有可能是干扰信号
IsAbnormal = true;
mData->IRZone = InValidAngle;
}
if (IsAbnormal) {
Reset_Array16(mData->IRCount, IRPINCOUNT);
//Serial.printf("abnormal\n");
return;
}
//加权平均
// Serial.println("");
AngleMean = 0; AngleSum = 0;
mData->ValidPinCount = 0;
ValidCountSum = 0;
for (i = 0; i < IRPINCOUNT; i++) {
if (mData->IRValidCount[i] < 1) { //脉冲数量少,认为是干扰,就置0
mData->IRValidCount[i] = 0;
} else {
(mData->ValidPinCount)++;
}
AngleSum += Angle[i] * mData->IRValidCount[i];
ValidCountSum += mData->IRValidCount[i];
}
if (ValidCountSum > 0) {
AngleMean = AngleSum / ValidCountSum;
} else {
AngleMean = InValidAngle;
}
sprintf(IRs, " Zone: %.2f Valid Signal Count: %d \n", AngleMean, ValidCountSum);
strOut = SideStr + String(IRs);
AngleStatus += strOut;
mData->IRZone = AngleMean;
Record_DoubleArray(IRAngleHistory, AngleMean, &IRRecordIndex, MaxHistoryCount);
}
void GetValidCount(IRSENSOR_DATA *mData) {
int CL = 500; uint8_t Error = 50;
int IRTime;
uint16_t i, j;
//用于调试程序
String IRStr = "", strOut;
for (j = 0; j < IRPINCOUNT; j++) {
IRStr = String(j) + ":";
for (i = 0; i < mData->IRCount[j]; i++) {
IRStr += String(mData->IRTimeHistory[j][i]) + " ";
}
// Serial.println(IRStr);
}
for (j = 0; j < IRPINCOUNT; j++) {
mData->IRValidCount[j] = 0;
for (i = 0; i < MaxIRShotCount; i++) {
IRTime = (mData->IRTimeHistory[j][i] + CL / 2) % CL + CL / 2;
if (CL - Error < mData->IRTimeHistory[j][i] && CL - Error < IRTime && IRTime < CL + Error) {
mData->IRValidCount[i]++;
}
}
}
}
long GetFirstIRTime_ms() {
return mIRData.IRFirstTime / 1000;
}
long GetFirstIRTime_us() {
return mIRData.IRFirstTime;
}
long GetFinalIRTime_ms() {
return mIRData.IREndTime / 1000;
}
//
//
void iniIR() {
uint8_t i;
uint8_t Model = FALLING; //CHANGE
if (!IsIniIRPin) {
for (i = 0; i < IRPINCOUNT; i++) {
pinMode(IRPin[i], INPUT_PULLUP);
}
i = 0;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR0, Model);//FALLING
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR1, Model);
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR2, Model);
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR3, Model);
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR4, Model);
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR5, Model);
i++;
attachInterrupt(digitalPinToInterrupt(IRPin[i]), IntCallbackIR6, Model);
ResetIRSensorData();
IRStatus = "";
AngleStatus = "";
IRResponseTime_String = "";
IRTimeStatus = "";
IsIniIRPin = true;
}
}
void DisableIRInterrupt() {
uint8_t i;
for (i = 0; i < IRPINCOUNT; i++) {
detachInterrupt(digitalPinToInterrupt(IRPin[i]));
}
IsIniIRPin = false;
}
//
void Reset_Array16(uint16_t IRCount[], int Length) {
int i;
for (i = 0; i < Length; i++) {
IRCount[i] = 0;
}
}
void Record_DoubleArray(double DArray[], double mydata, uint8_t * index, uint8_t Length) {
DArray[*index] = mydata;
(*index)++;
if ((*index) >= Length) {
Push_DoubleArray(DArray, Length);
*index = Length - 1;
}
}
void Push_DoubleArray(double History[], int Length) {
int i;
for (i = 0; i < Length - 1; i++) {
History[i] = History[i + 1];
}
}
//
采购清单