飞行器的控制通过几个环来实现,外环控制为位置的控制,内环控制为姿态的控制,通过姿态的控制来实现飞行器的动态控制,从而控制飞行器的速度和位置,大致框架如下
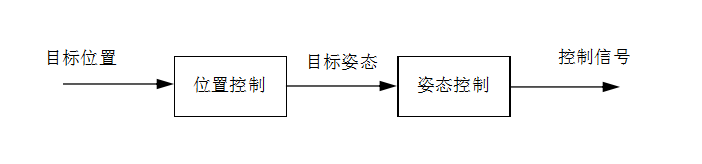
位置控制根据目标位置得出飞行器的目标姿态,姿态控制则根据需要实现的目标姿态输出控制信号,使飞行器达到目标的姿态。位置控制和姿态控制也有不同的方法,开源方案APM、px4等在位置控制和姿态控制里面再采用了多个环串联的方法。这里则介绍一种单个环来实现位置控制和姿态控制的方法,相比较多环的控制具备响应速度快的特点,在这里作一下介绍。
从姿态控制开始,单个环用PID控制很难实现稳定的姿态控制,需要加上一个二次微分项的反馈才能够实现稳定的姿态控制,称之为PIDD控制,控制公式如下

其中 为控制信号,
为控制信号, 为姿态误差,这里可以代表姿态角的偏差,
为姿态误差,这里可以代表姿态角的偏差, 为误差项、积分项、微分项和二次微分项的反馈比例系数。相比常规的PID控制,多了一项二次微分项。出于多轴无人飞行器的动态特性,这一项具有重要的作用,经实测加上这一项能够实现稳定的姿态控制。因为二次微分的高频放大特性,通常对误差信号进行低通滤波再进行计算。这种控制实现方式的优点在于在一个环就实现了姿态控制,计算快速,另外因为在一个环中实现控制,响应也比较快速。
为误差项、积分项、微分项和二次微分项的反馈比例系数。相比常规的PID控制,多了一项二次微分项。出于多轴无人飞行器的动态特性,这一项具有重要的作用,经实测加上这一项能够实现稳定的姿态控制。因为二次微分的高频放大特性,通常对误差信号进行低通滤波再进行计算。这种控制实现方式的优点在于在一个环就实现了姿态控制,计算快速,另外因为在一个环中实现控制,响应也比较快速。
同样的,位置环也可以采用同样的控制方法来实现位置控制,比如

其中 表示某个通道的姿态角,如滚转角/俯仰角,表示位置的偏差,其它符号意义同上。
表示某个通道的姿态角,如滚转角/俯仰角,表示位置的偏差,其它符号意义同上。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)