正交子空间
前面我们已经知道了,两个向量的内积为0是勾股定理的另一种表现形式。现在我们来研究一下两个子空间之间的正交。虽然,我很不喜欢一上来就先给个定义,但我这里还是要给,sorry!
现有两个子空间V和W,如果V中的任何一个向量v和W中的任何一个向量w都正交,则子空间V正交于子空间W。

如果说线性代数基本定理的上半部分,告诉了我们A的列空间C(A)与A的行空间C( )的维数都是r(they are drawn the same size), 剩下的两个零空间,A的零空间和A的左零空间的维度则分别是n-r和m-r。那么线性代数基本定理的下半部分则告诉我们,这四个基本子空间是两两正交的,且互为正交补。
)的维数都是r(they are drawn the same size), 剩下的两个零空间,A的零空间和A的左零空间的维度则分别是n-r和m-r。那么线性代数基本定理的下半部分则告诉我们,这四个基本子空间是两两正交的,且互为正交补。
零空间与行空间正交
对于任何mxn的矩阵A,在 中,A的零空间与行空间正交。记作,
中,A的零空间与行空间正交。记作, 。
。
证明:
首先,我们回到A的零空间的定义,A的零空间是齐次方程组Ax=0,所有的解x的集合。那么,按照零空间的定义,我们在Ax=0的零空间中,随便找一个向量w(他是Ax=0的一个解),他满足Ax=0。现在我们把他展开如下:

根据第一行方程,我们得到A的第一行Row1乘以w等于0,根据第二行方程,得到A的第二行Row2乘以w等于0,一直到最后一个方程,A的最后一行Rowm乘以w等于0。按照内积的定义:

我们有(把n维向量的内积看成是各元素逐一相乘后的累加和):

即,Row1正交于w,Row2正交于w......Rowm正交于w。即w正交于A中的每一行,因此,向量w也正交于他们的线性组合,即,A的行空间。(注:一般情况下,我们更喜欢用矩阵转置的列组合来描述A的行空间。即,我们把A中的每行,看成是中的每一列,则A中各行的线性组合等价于中各列的线性组合)如此一来,我们就证明了,向量w正交于A的每一行。
反过来,我们也证明一下A的行空间中的任意一个向量v和零空间中的任意一个向量都正交。设向量x1,x2,....xn是在A的零空间中任意选择的若干个向量。按照零空间的定义,只要向量是A的零空间中的向量,则一定满足方程组Ax1=0,Ax2=0,....Axn=0。又因为行空间中的任意一个向量v,要么是A的某一行,要么是行的线性组合。则,根据前面的方程组,分别有,v乘以v1等于0(即,向量v正交于x1),向量v正交于x2,.....向量v正交于xn。这说明,A的行空间中的任意一个向量v,正交于A的零空间中的任意向量,因此v正交于A的零空间。
最终得到,A的零空间N(A)正交于A的行空间C()。

例1:
左零空间与列空间正交
对于任何mxn的矩阵A,在 中,A的左零空间与列空间正交。记作,
中,A的左零空间与列空间正交。记作, 。
。
证明:
同上,假设w是A的左零空间中的任意一个向量,根据A的左零空间的定义,有:

然后再根据内积的定义(把n维向量的内积看成是各元素逐一相乘后的累加和),可知:

由此可见,A的左零空间中的一个任意向量w,正交于A中的每一列,从而他也正交于这些列的每一种线性组合v,而v又是A的列空间中的一个任意向量。因此,我们说,A的左零空间N()正交于A的列空间C(A)。Q.E.D。

例2:
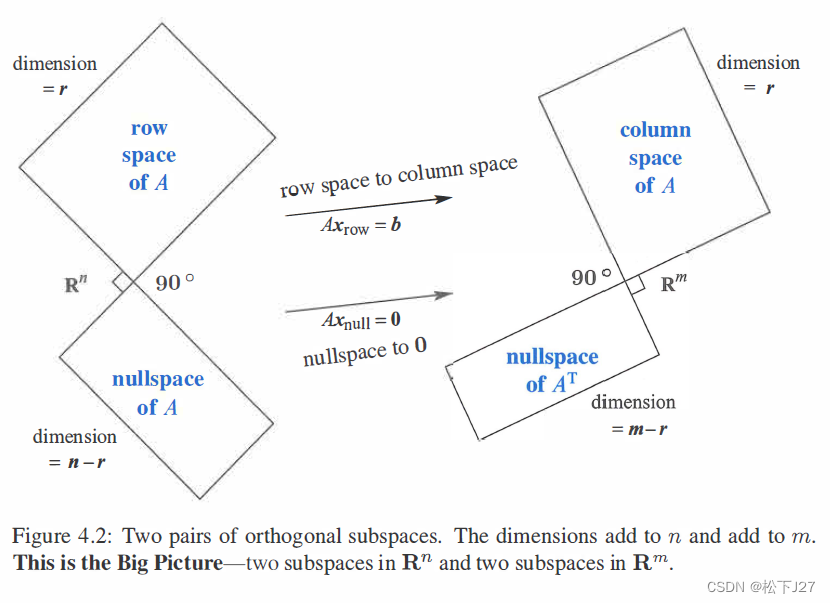
THE BIG PICTURE(I)
正交补

正交补:
设V是 的子空间,则所有正交于V的向量所在的空间,叫做V的正交补,记作
的子空间,则所有正交于V的向量所在的空间,叫做V的正交补,记作 。
。
根据之前的学习,我们知道了,A的四个基本子空间他们两两正交,即,互为正交子空间。但,事实上,两个正交的子空间V和W,可以互为正交子空间,但不一定是互为正交补。
例如,子空间V是一个 的子空间,是由向量【0,1,0】所张成的一条直线。子空间W也是R3的子空间,是由向量【0,0,1】所张成的一条直线。V和W两个子空间中的任何一个向量都正交,因此得到两个子空间两两正交。但是,两个子空间的维度dim(V)+dim(W)=1+1=2,并不等于3。也就是说两个子空间加在一起并没有充满整个,因此,V并不是W的正交补。如下图所示,W+V的组合,只能张成一个二维平面,正好等于二者维度的和2。
的子空间,是由向量【0,1,0】所张成的一条直线。子空间W也是R3的子空间,是由向量【0,0,1】所张成的一条直线。V和W两个子空间中的任何一个向量都正交,因此得到两个子空间两两正交。但是,两个子空间的维度dim(V)+dim(W)=1+1=2,并不等于3。也就是说两个子空间加在一起并没有充满整个,因此,V并不是W的正交补。如下图所示,W+V的组合,只能张成一个二维平面,正好等于二者维度的和2。

实际上,在空间中,子空间W的正交补,应该是一个二维平面(如下图所示),而上图中的V只是一条直线,是W的正交补的一部分。

也就是说,在空间中的两个子空间V和W,如果互为正交补,则两个子空间的维度的和等于n,即两个正交的子空间可以张成整个空间。即:

两两正交的行空间与零空间互为正交补
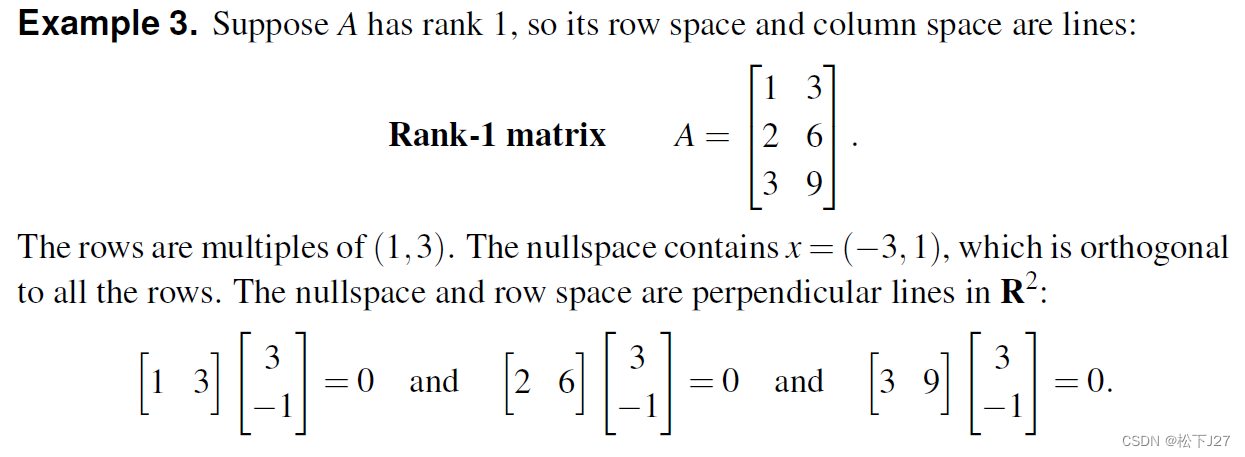
考虑上面的这个秩为1的矩阵,已知A的行空间与零空间正交。他的行空间是由向量【1,3】所张成的一条直线。向量【-3,1】'是零空间的基底,他的零空间是常数c和向量【-3,1】张成的一条直线【-3c,c】。因为行空间与零空间互为正交子空间,所以,来自行空间的向量【1,3】,【2,6】,【3,9】和【-3,1】都正交。(或者说,假设向量【x1,x2】是A的零空间的一个任意向量,则一定有向量【1,3】,【2,6】,【3,9】和【x1,x2】都正交)
A的行空间是 的子空间,维数=rank=1,是一条线。A的零空间也是的子空间,维数=n-r=1,也是一条直线。我们发现,(零空间的维度=1)+(行空间的维度=1)=(n=2)。这一发现对于其他的所有矩阵也适用,即:
的子空间,维数=rank=1,是一条线。A的零空间也是的子空间,维数=n-r=1,也是一条直线。我们发现,(零空间的维度=1)+(行空间的维度=1)=(n=2)。这一发现对于其他的所有矩阵也适用,即:
行空间的维度+零空间的维度=矩阵A的列数n
我们发现,A的零空间和行空间的关系,不仅仅是正交,而且,零空间N(A)还包含了所有正交于行空间的向量,反之亦然。
因此,我称A的零空间是行空间的正交补,或者说他们互为正交补。因为,你无法找到一个垂直于A的行空间却不属于A的零空间的向量。
两两正交的列空间与左零空间互为正交补
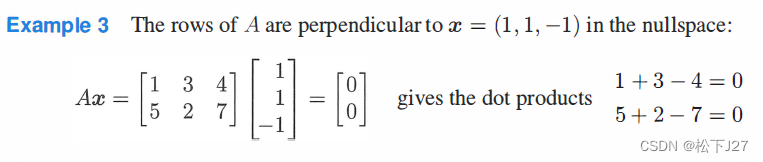
此外,A的列空间与左零空间正交。向量【1,2,3】是列空间的基底,A的列空间是由它所张成的。向量【1,1,-1】是左零空间的一个解,它与列向量【1,2,3】正交。或者说,对于任何一个左零空间的向量【x1,x2,x3】,一定满足 ,因而,一定有向量【x1,x2,x3】和第一列【1,2,3】,第二列【3,6,9】都正交。
,因而,一定有向量【x1,x2,x3】和第一列【1,2,3】,第二列【3,6,9】都正交。
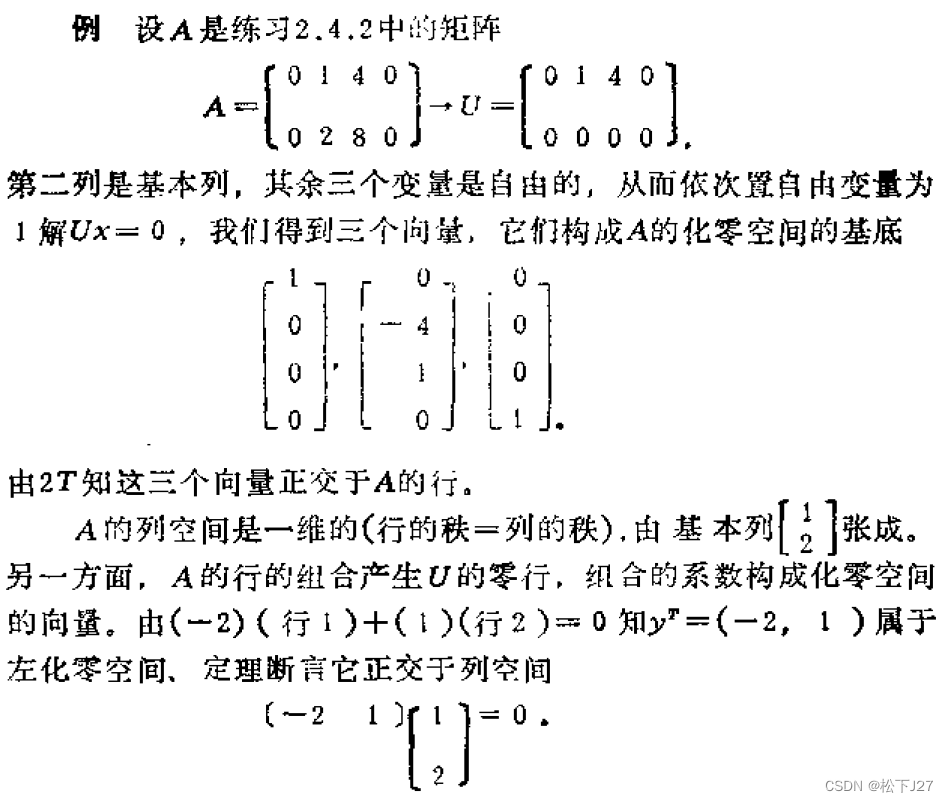
A的列空间是的子空间,维数=rank=1(行秩=列秩),是由基底【1,2,3】张成的一条直线。A的左零空间也是的子空间,维数=m-r=2,是由m-r个特解所张成的一个平面。
求解A的左零空间:


共两个自由列,对应两个自由变量x2,x3。

现在分别令x2=1,x3=0和x2=0,x3=1分别求解Ux=0,共得到两个特解向量【-2,1,0】和【-3,0,1】,这两个向量都与A的各列正交,且张成了一个二维平面。同样,我们发现,(左零空间的维度=2)+(列空间的维度=1)=(m=3),推广到其他线性方程组,得到:
列空间的维度+左零空间的维度=矩阵A的行数m
线性代数基本定理下
这样一来,我们就得到了线性代数得基本定理的下半部分,前半部分指出了四个基本子空间的维数,包括行空间的维数等于列空间的维数。但现在我们知道,他们不仅相互垂直,或者说是两两正交,更重要的是他们互为正交补。即:

在中,零空间与行空间互为正交补。
在中,列空间与左零空间互为正交补。
再看Ax=b
如此一来,我们又可以从另一个角度去审视线性方程组Ax=b。根据我们之前的理解,只有当b等于A的各列的线性组合时,或者说,只有b属于A的列空间时,Ax=b才有解。(这是Ax=b的一种直观理解)。
而,当我们知道了线性代数基本定理的下半部分以后,我们会说,Ax=b有解,当且仅当b垂直于A的左零空间。(这是Ax=b的一种间接理解)

根据这一定理,有时候,我们不太好判断A的各列是否可以通过线性组合得到b,在这个时候,我们也可以换一种方法,验证一下 是否等于0。
是否等于0。
例如:
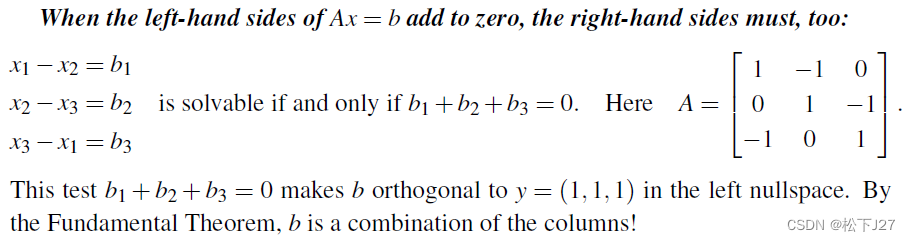
对于上述方程组而言,对于给定的b,我们可以通过判断b是否可以通过A各列的线性组合得到,同时,我们还可以先求出一个左零空间的向量y=(1,1,1),然后再看判断给定的b是否和y正交。根据向量的内积定理,我们得到b1+b2+b3=0。因此,对于上例中的Ax=b方程组而言,Ax=b是否有界,只需要判断b中所有元素的和是否等于0。这就大大的简化了,我们对方程组是否有解的判断!
THE BIG PICTURE(II)
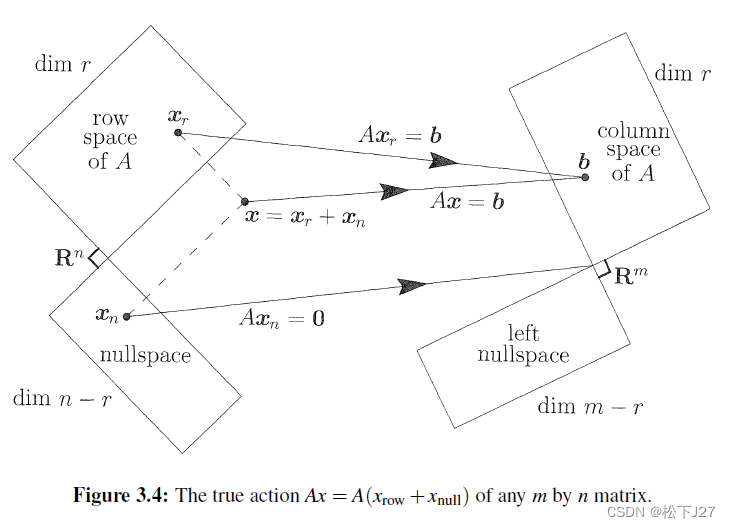
有了线性代数基本定理的下半部分,即他们互为正交补,我们就可以把中的任何一个向量,正交分解成属于子空间V的一部分和属于子空间W的另一部分。假设现有3x2的矩阵A,且秩为1,则他的行空间和零空间的维度都分别为1,都是的子空间。现在我们把这个二维空间看成是充满整个二维坐标的平面,这样一来两个一维的正交子空间就好比是二维坐标系中的x轴与y轴。在二维坐标系中的任何一个向量都可以分解成,沿x轴方向的向量v和沿y轴方向的向量u的和。(如下图所示)

把这个想法推广到维空间中的任何两个互为正交补的子空间V和W,则,任何一个属于的向量x,都可以表示成x=v+u。向量v是x在子空间V上的投影,向量u是x在子空间W上的投影。而这,就是整个线性代数中最重要的一张插图"THE BIG PICTURE(II)"所揭示的内容。
THE BIG PICTURE(II)总结了线性代数的全部基本定理,他是对矩阵A的一种诠释!
1,对于中的一个任意向量x都可以被分解为x= +
+ 这两个分量。
这两个分量。
2,矩阵A乘以行空间中的向量,得到列空间中的向量Ax,即,向量b。即,A=Ax=b。
3,矩阵A乘以零空间中的向量,得到全零向量。即,A=0。
综上,如果我们用A乘以分解后的x,得到:
Ax=A( +
+ )= A+A=b+0=b
)= A+A=b+0=b
(全文完)
作者 --- 松下J27
参考文献(鸣谢):
1,线性代数及其应用,侯自新,南开大学出版社,1990.
2,Linear Algebra and Its Applications(Fourth Edition) - Gilbert Strang
3,Introduction to Linear Algebra,Fifth Edition - Gilbert Strang
古诗词赏析:
《己亥杂诗》---龚自珍
九州生气恃(shì)风雷,
万马齐喑(yīn)究可哀。
我劝天公重抖擞,
不拘一格降人才。

(配图与本文无关)
版权声明:所有的笔记,可能来自很多不同的网站和说明,在此没法一一列出,如有侵权,请告知,立即删除。欢迎大家转载,但是,如果有人引用或者COPY我的文章,必须在你的文章中注明你所使用的图片或者文字来自于我的文章,否则,侵权必究。 ----松下J27