参考:
ubuntu18.04安装Rtabmap(具体详细步骤)
教你手把手运行基于ZED的rtab-map
ZED入门:利用RTAB-MAP做SLAM
ubuntu16.04 ROS Kinetic+rtabmap 源码(非ros版本)安装运行
可以新建一个rtabmap_slam文件夹,然后
安装g2o
git clone https://github.com/RainerKuemmerle/g2o/
cd g2o
git checkout 9b41a4ea5a
mkdir build
cd build
cmake ..
make
sudo make install
安装GTSAM
git clone --branch 4.0.0-alpha2 https://github.com/borglab/gtsam.git gtsam-4.0.0-alpha2
cd gtsam-4.0.0-alpha2
mkdir build
cd build
cmake -DGTSAM_USE_SYSTEM_EIGEN=ON -DGTSAM_BUILD_EXAMPLES_ALWAYS=OFF -DGTSAM_BUILD_TESTS=OFF -DGTSAM_BUILD_UNSTABLE=OFF ..
make -j4
sudo make install
新建rtabmap_ws工作空间
mkdir -p rtabmap_ws/src
cd rtabmap_ws
catkin_make
sudo gedit ~/.bashrc
source ~/rtabmap_slam/rtabmap_ws/devel/setup.bash
安装rtabmap
git clone https://github.com/introlab/rtabmap.git rtabmap
安装依赖
sudo apt-get install ros-melodic-rtabmap ros-melodic-rtabmap-ros
执行
cd rtabmap/build
cmake -DCMAKE_INSTALL_PREFIX=~/rtabmap_slam/rtabmap_ws/devel ..
make -j4
make install
单独使用rtabmap建图的方法
终端输入rtabmap,再选择zed相机如下:

然后点击新文件
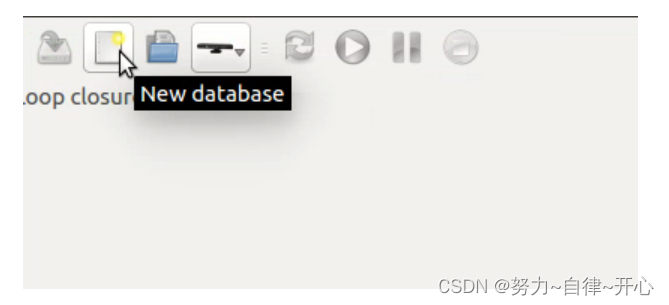
再点击开始按钮,即可建图。

保存建图结果
安装rtabmap_ros
cd ~/rtabmap_slam/rtabmap_ws
git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
catkin_make
安装成功
用ZED使用rtabmap
需要先配置zed的使用环境,之后运行如下命令;
roslaunch zed_wrapper zed.launch camera_model:=zed
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/zed/zed_node/rgb/image_rect_color depth_topic:=/zed/zed_node/depth/depth_registered camera_info_topic:=/zed/zed_node/rgb/camera_info frame_id:=base_link approx_sync:=false visual_odometry:=false odom_topic:=/zed/zed_node/odom
rviz显示并建图
roslaunch zed_rtabmap_example zed_rtabmap.launch
roslaunch 启动文件,rtabmap_args:="–delete_db_on_start" 是说启动前先删除数据库db下的数据, topic分别对应好rgb彩色数据、depth深度数据、相机参数信息。

用英特尔相机使用rtabmap
安装参考
Ubuntu 18.04安装RealSense ROS功能包
Ubuntu18.04安装realsense d435i SDK和ROS Wrapper以及相机标定全过程
安装Realsense SDK
下载资源librealsense,从github下载source
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
安装依赖项
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
编译librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make #用虚拟机make可能会卡在81%很久,一直等即可。
sudo make install
测试sdk是否安装成功
cd build/examples/capture
./rs-capture
或
realsense-viewer
装好ros版后,还可以使用rviz来查看相关的信息:
roslaunch realsense2_camera rs_rgbd.launch
#然后另外打开一个终端:
rviz
在 rviz中添加camera,并设置相应的话题即可。
安装 ROS Warpper
建立workspace
mkdir -p realsense_ws/src
cd realsense_ws/src/
catkin_init_workspace
cd ..
catkin_make
echo "source ~/rtabmap_slam/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
下载ddynamic_reconfigure与realsense-ros
cd realsense_ws/src/
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
git clone https://github.com/IntelRealSense/realsense-ros.git
编译
cd ..
catkin_make
运行
roslaunch realsense2_camera rs_camera.launch
安装好realsense驱动和rtabmap的ROS版本使用以下命令:
roslaunch realsense2_camera rs_camera.launch align_depth:=true
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Optimizer/GravitySigma 0.3" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false
安装meshlab
sudo snap install --devmode meshlab
附录:
1.如果如到Qt报错可以重新装一个Qt,装好后要建立软链接
解决:qt换新版本时“version `Qt_5' not found””
sudo rm /usr/lib/x86_64-linux-gnu/libQt5*
sudo cp /home/huang/Qt5.9.5/5.9.5/gcc_64/lib/libQt5* /usr/lib/x86_64-linux-gnu/
添加新版本路径 sudo vim /etc/profile
export LD_LIBRARY_PATH="/home/huang/Qt5.9.5/5.9.5/gcc_64/lib:$LD_LIBRARY_PATH"
版本切换
qmake -v
sudo rm /usr/bin/qmake
sudo ln -s /home/huang/Qt5.9.5/5.9.5/gcc_64/bin/qmake /usr/bin/qmake
或直接搜索软链接名称,复制到缺失的目录下,不能复制时可强行复制文件,执行
sudo nautilus
2.如果遇到不能打开数据集文件
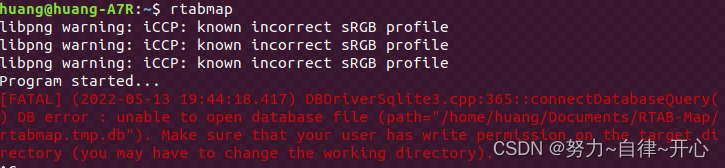
对Documents/目录下的所有子文件与子目录执行相同的权限变更:
sudo chmod -R 777 Documents/