vl6180x_i2c.c
I2C通信
获取VL6180x地址
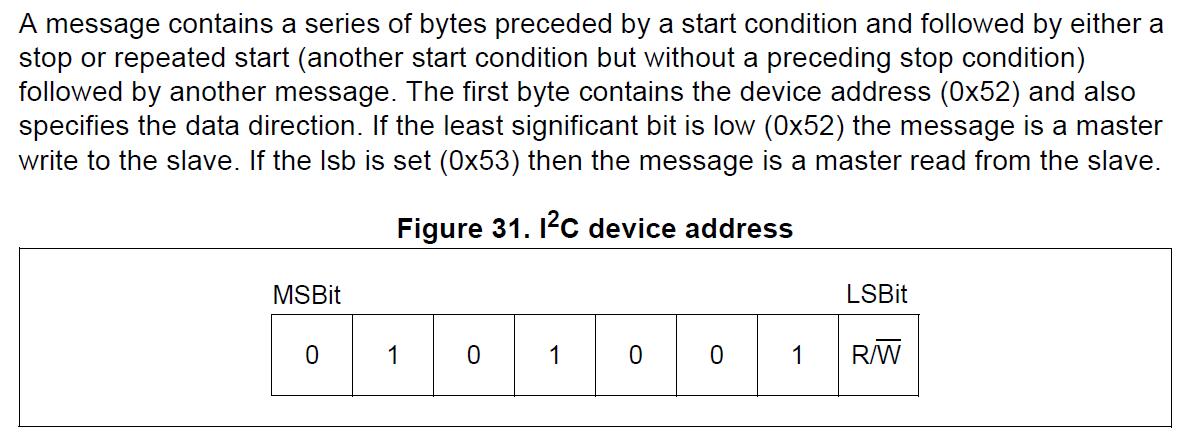
可以知道7位地址为0x29
写: 0x52
读: 0x53
写入数据
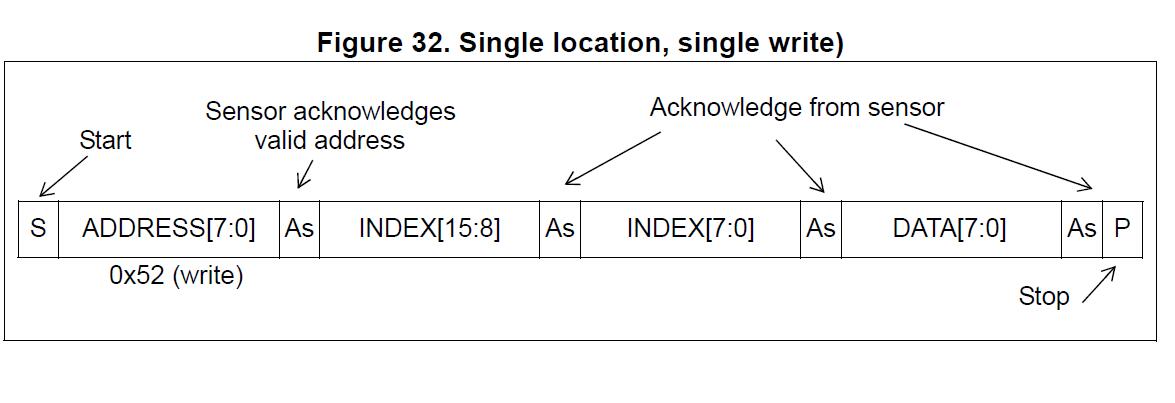
/*
* 通过I2C总线向某一寄存器写入一个字节数据
* 成功 0
* 失败 1
*/
uint8 VL6180X_WriteBytes(uint8 I2C_addr,uint16 index,uint8 dat)
{
uint8 Index_H = (uint8)(index >> 8);
uint8 Index_L = (uint8)(index & 0xff);
start();
iic_write(I2C_addr | 0X00); //WRITE i2c
if (check_ack()==0) {
goto err;
}
iic_write(Index_H); //TDOS'register
if (check_ack()==0) {
goto err;
}
iic_write(Index_L); //TDOS'register
if (check_ack()==0) {
goto err;
}
iic_write(dat); //发送数据字节
if (check_ack()==0) {
goto err;
}
stop();
return 0;
err:
stop();
return 1;
}
读出数据
读单个数据
/*
* 通过I2C总线读出某一寄存器的数据
*/
uint8 VL6180x_ReadBytes(uint8 I2C_addr, uint16 index) {
uint8 dat;
uint8 Index_H = (uint8)(index >> 8);
uint8 Index_L = (uint8)(index & 0xff);
start();
iic_write(I2C_addr | 0X00); //WRITE i2c
if (check_ack()==0) {
goto err;
}
iic_write(Index_H); //TDOS'register
if (check_ack()==0) {
goto err;
}
iic_write(Index_L); //TDOS'register
if (check_ack()==0) {
goto err;
}
start(); //重发起动信号
iic_write(I2C_addr | 0X01); //READ
if (check_ack()==0) {
goto err;
}
dat = iic_read(); //接收读出的数据
stop();
return dat;
err:
stop();
return 0;
}
读两组数据
/*
* 通过I2C总线读出某一寄存器的数据
*/
uint16 VL6180x_Read_Two_Bytes(uint8 I2C_addr, uint16 index) {
uint8 t;
uint16 data_res;
uint8 Index_H = (uint8)(index >> 8);
uint8 Index_L = (uint8)(index & 0xff);
start();
iic_write(I2C_addr | 0X00); //WRITE i2c
if (check_ack()==0) {
goto err;
}
iic_write(Index_H); //TDOS'register
if (check_ack()==0) {
goto err;
}
iic_write(Index_L); //TDOS'register
if (check_ack()==0) {
goto err;
}
stop();
start(); //重发起动信号
iic_write(I2C_addr | 0X01); //READ
if (check_ack()==0) {
goto err;
}
t = iic_read(); //接收读出的数据
send_ack();
data_res = t;
t = iic_read(); //接收读出的数据
send_ack();
data_res = ((data_res<<8) | t);
// t = iic_read(); //接收读出的数据
// send_ack();
// data_res = ((data_res<<16) | t);
//
// t = iic_read(); //接收读出的数据
// send_ack();
// data_res = ((data_res<<24) | t);
stop();
return data_res;
err:
stop();
return 0;
}
检测ID
从文档中获取ID地址:
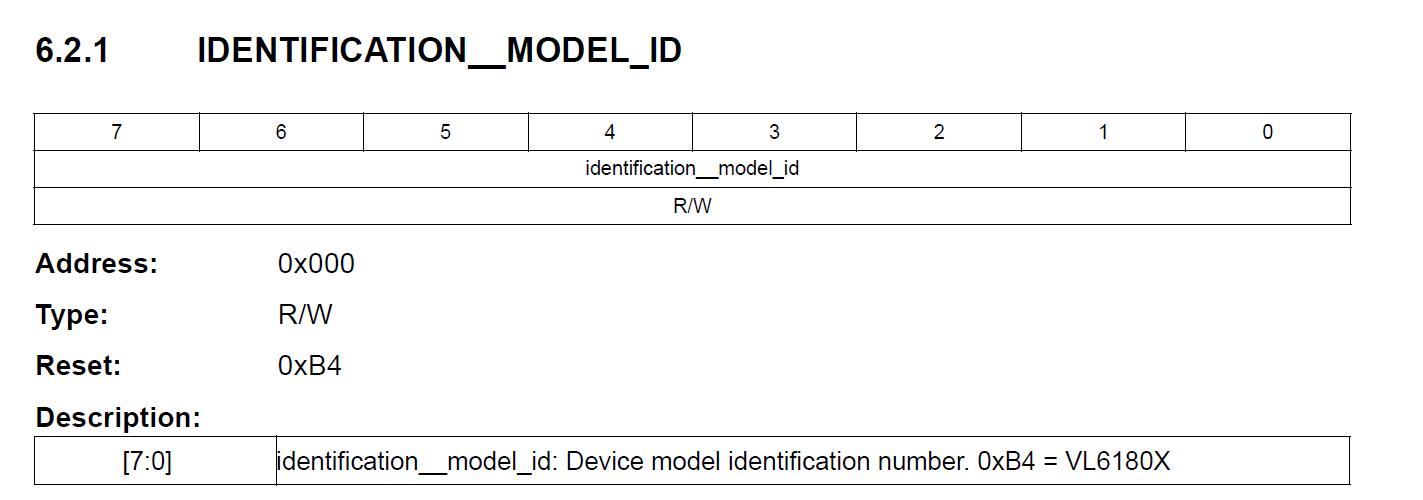
地址:0x000
默认值: 0xB4
/*
*********************************************************************************************************
1. 函 数 名: VL6180X_CheckID
2. 功能说明: 获取VL6180X的ID
3. 返 回 值: VL6180X_ID
*********************************************************************************************************
*/
uint8 VL6180X_CheckID(void)
{
uint8 data_ID;
data_ID = VL6180x_ReadBytes(DEV_ADDR, VL6180X_IDENTIFICATION_MODEL_ID);
return data_ID;
}
获取芯片的ID目的:
- 检测通信是否成功
- 检测芯片是否正常工作
初始化

void VL6180X_Init(void)
{
uint8 reset=0, timeOut=0;
GPIO_0_OUTPUT;
GPIO_1_OUTPUT;
// Power_PIN_OUTPUT;
// Power_PIN_PORT=0;
// GPIO_0_PIN_PORT = 0;
// GPIO_1_PIN_PORT = 0;
// DelayMS(5);
// Power_PIN_PORT=1;
// DelayMS(5);
// GPIO_0_PIN_PORT = 1;
// GPIO_1_PIN_PORT = 1;
// DelayMS(5);
GPIO_0_PIN_PORT = 0;
GPIO_1_PIN_PORT = 0;
DelayMS(10);
GPIO_0_PIN_PORT = 1;
GPIO_1_PIN_PORT = 1;
DelayMS(1);
while(!(VL6180X_CheckID() == 0xB4));
DelayMS(5);
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_FRESH_OUT_OF_RESET, 0x01);
while (reset!=1 && timeOut<100) {
reset = VL6180x_ReadBytes(DEV_ADDR, VL6180X_SYSTEM_FRESH_OUT_OF_RESET); // read fresh_out_of_reset bit
if(reset == 1) { // if if fresh_out_of_reset bit set, then device has been freshly initialized
// SR03 settings AN4545 24/27 DocID026571 Rev 19 SR03 settings
// http://www.st.com/st-web-ui/static/active/en/resource/technical/document/application_note/DM00122600.pdf
// Below are the recommended settings required to be loaded onto the VL6180X during the
// initialisation of the device (see Section 1.3).
// Mandatory : private registers
VL6180X_WriteBytes(DEV_ADDR, 0x0207, 0x01);
data_reg = VL6180x_ReadBytes(DEV_ADDR, 0x0207);
VL6180X_WriteBytes(DEV_ADDR, 0x0208, 0x01);
VL6180X_WriteBytes(DEV_ADDR, 0x0096, 0x00);
VL6180X_WriteBytes(DEV_ADDR, 0x0097, 0xFD);
VL6180X_WriteBytes(DEV_ADDR, 0x00e3, 0x00);
VL6180X_WriteBytes(DEV_ADDR, 0x00e4, 0x04);
data_reg = VL6180x_ReadBytes(DEV_ADDR, 0x00e4);
VL6180X_WriteBytes(DEV_ADDR, 0x00e5, 0x02);
VL6180X_WriteBytes(DEV_ADDR, 0x00e6, 0x01);
VL6180X_WriteBytes(DEV_ADDR, 0x00e7, 0x03);
VL6180X_WriteBytes(DEV_ADDR, 0x00f5, 0x02);
VL6180X_WriteBytes(DEV_ADDR, 0x00d9, 0x05);
VL6180X_WriteBytes(DEV_ADDR, 0x00db, 0xce);
VL6180X_WriteBytes(DEV_ADDR, 0x00dc, 0x03);
VL6180X_WriteBytes(DEV_ADDR, 0x00dd, 0xf8);
VL6180X_WriteBytes(DEV_ADDR, 0x009f, 0x00);
VL6180X_WriteBytes(DEV_ADDR, 0x00a3, 0x3c);
VL6180X_WriteBytes(DEV_ADDR, 0x00b7, 0x00);
VL6180X_WriteBytes(DEV_ADDR, 0x00bb, 0x3c);
VL6180X_WriteBytes(DEV_ADDR, 0x00b2, 0x09);
VL6180X_WriteBytes(DEV_ADDR, 0x00ca, 0x09);
VL6180X_WriteBytes(DEV_ADDR, 0x0198, 0x01);
VL6180X_WriteBytes(DEV_ADDR, 0x01b0, 0x17);
VL6180X_WriteBytes(DEV_ADDR, 0x01ad, 0x00);
VL6180X_WriteBytes(DEV_ADDR, 0x00ff, 0x05);
VL6180X_WriteBytes(DEV_ADDR, 0x0100, 0x05);
VL6180X_WriteBytes(DEV_ADDR, 0x0199, 0x05);
VL6180X_WriteBytes(DEV_ADDR, 0x01a6, 0x1b);
VL6180X_WriteBytes(DEV_ADDR, 0x01ac, 0x3e);
VL6180X_WriteBytes(DEV_ADDR, 0x01a7, 0x1f);
VL6180X_WriteBytes(DEV_ADDR, 0x0030, 0x00);
data_reg = VL6180x_ReadBytes(DEV_ADDR, 0x0030);
// configure range measurement for low power
// Specify range measurement interval in units of 10 ms from 0 (= 10 ms) - 254 (= 2.55 s)
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_INTERMEASUREMENT_PERIOD, 0x0A); // 100 ms interval in steps of 10 ms
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_VHV_REPEAT_RATE, 0xFF); // sets number of range measurements after which autocalibrate is performed
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_VHV_RECALIBRATE, 0x01); // perform temperature calibration of the ranging sensor
// Set Early Convergence Estimate for lower power consumption
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_MAX_CONVERGENCE_TIME, 0x32); // set max convergence time to 50 ms (steps of 1 ms)
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_RANGE_CHECK_ENABLES, 0x10 | 0x01); // enable (0x01) early convergence estimate
// This ECE is calculated as follows:
// [(1 - % below threshold) x 0.5 x 15630]/ range max convergence time
// This is ~123 ms for 50 ms max convergence time and 80% below threshold
// This is a sixteen bit (2 byte) register with the first byte MSByte and the second LSByte
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_EARLY_CONVERGENCE_ESTIMATE, 0x00); // set early convergence estimate to 5%
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_EARLY_CONVERGENCE_ESTIMATE + 1, 0x7B); // set early convergence estimate to 5%
// Configure ALS
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_INTERMEASUREMENT_PERIOD, 0x0A); // set to 100 ms
data_reg = VL6180x_ReadBytes(DEV_ADDR, VL6180X_SYSALS_INTERMEASUREMENT_PERIOD);
// Following is a 16-bit register with the first MSByte reserved
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_INTEGRATION_PERIOD, 0x00);
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_INTEGRATION_PERIOD+1, 0x63); // set ALS integration time to 100 ms in steps of 1 ms
// The internal readout averaging sample period can be adjusted from 0 to 255. Increasing the sampling
// period decreases noise but also reduces the effective max convergence time and increases power consumption:
// Effective max convergence time = max convergence time - readout averaging period (see
// Section 2.5: Range timing). Each unit sample period corresponds to around 64.5 ?s additional
// processing time. The recommended setting is 48 which equates to around 4.3 ms
VL6180X_WriteBytes(DEV_ADDR, VL6180X_READOUT_AVERAGING_SAMPLE_PERIOD, 0x30); // compromise between low noise and increased execution time
// Gain can be 0 = 20, 1 = 10, 2 = 5, 3 = 2.5, 4 = 1.67, 5 = 1.25, 6 = 1.0 and 7 = 40
// These are value possible for the lower nibble. The upper nibble must be 4
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_ANALOGUE_GAIN, 0x40 | 1); // Sets light and dark gain (don't change upper nibble)
data_reg = VL6180x_ReadBytes(DEV_ADDR, VL6180X_SYSALS_ANALOGUE_GAIN);
// Scalar (1 - 32, bits 4:0) to multiply raw ALS count for additonal gain, if necessary
VL6180X_WriteBytes(DEV_ADDR, VL6180X_FIRMWARE_RESULT_SCALER, 0x01);
// Configure the interrupts
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_MODE_GPIO0, 0x00); // set up GPIO 0 (set to high impedence for now)
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_MODE_GPIO1, 0x00); // set up GPIO 1 (set to high impedence for now)
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_INTERRUPT_CONFIG_GPIO, 0x24); // enable sample ready interrupt
#if 0
// enable continuous range mode
if(VL6180XMode == contRangeMode) {
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_START, 0x03); // start auto range mode
}
// enable continuous ALS mode
if(VL6180XMode == contALSMode) {
// Configure ALS
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_INTERMEASUREMENT_PERIOD, 0x32); // set to 100 ms
// Following is a 16-bit register with the first MSByte reserved
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_INTEGRATION_PERIOD+1, 0x32); // set ALS integration time to 50 ms in steps of 1 ms
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSALS_START, 0x03); // start auto range mode
}
#endif
// Clear reset bit
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_FRESH_OUT_OF_RESET, 0x00); // reset fresh_out_of_reset bit to zero
} else {
timeOut++;
}
}
reset=0;
}
这段代码可以移植官方例程,配置寄存器的值,初始化I\O口
获取光强值
uint16 ligthPollingRead(void)
{
uint8 status;
uint16 alsraw;
/* Wait for device ready. */
do {
status = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_ALS_STATUS);
} while ((status & (1 << 0)) == 0);
VL6180X_WriteBytes(DEV_ADDR,VL6180X_SYSALS_START, START_SINGLE_MODE);
data_reg = VL6180x_ReadBytes(DEV_ADDR, VL6180X_SYSALS_START);
status = VL6180x_ReadBytes(DEV_ADDR,VL6180X_RESULT_INTERRUPT_STATUS_GPIO);
status = status & ALS_SINGLE_MODE_MASK;
// while (status != ALS_SINGLE_MODE_READY) {
// status = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_INTERRUPT_STATUS_GPIO);
// status = status & ALS_SINGLE_MODE_MASK;
// DelayMS(1);
// }
alsraw = VL6180x_Read_Two_Bytes(DEV_ADDR, VL6180X_RESULT_ALS_VAL);
//als = 0.32f * ((float) alsraw / 10.32) * (100.0f/100.0f);
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_INTERRUPT_CLEAR, CLEAR_ALS_INT);
return alsraw;
}
获取距离数据
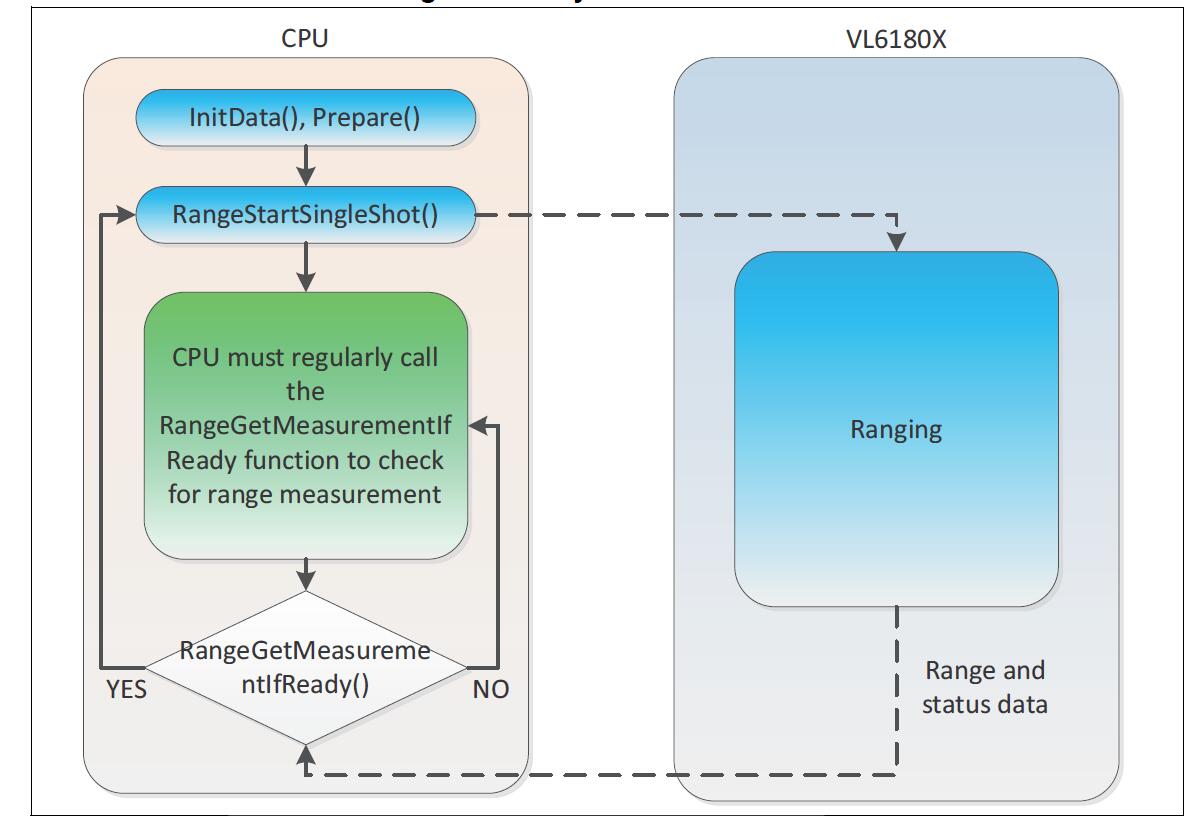
uint8 RangePollingRead(void)
{
uint8 status;
uint8 distance;
/* Wait for device ready. */
do {
status = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_RANGE_STATUS);
} while ((status & (1 << 0)) == 0);
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSRANGE_START, START_SINGLE_MODE);
data_reg = VL6180x_ReadBytes(DEV_ADDR, VL6180X_SYSRANGE_START);
status = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_INTERRUPT_STATUS_GPIO);
status = status & RANGE_SINGLE_MODE_MASK;
/* Wait for measurement ready. */
while (status != RANGE_SINGLE_MODE_READY) {
status = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_INTERRUPT_STATUS_GPIO);
status = status & RANGE_SINGLE_MODE_MASK;
DelayMS(1);
}
DelayMS(10);
distance = VL6180x_ReadBytes(DEV_ADDR, VL6180X_RESULT_RANGE_VAL);
VL6180X_WriteBytes(DEV_ADDR, VL6180X_SYSTEM_INTERRUPT_CLEAR, CLEAR_ALS_INT);
return distance;
}
GitHub工程源代码:
https://github.com/lanhaixuan/CC2541_VL6180X_BMA250