IMU预积分,算是比较简单的一个算法,无奈网上找到的资料都讲的晦涩难懂,看明白了也觉得不过如此。
讲一下我的理解:
整体流程
1. 推导IMU离散运动方程
2. 根据离散运动方程,进行预积分,并将预积分的误差项拆分出来,因为我们在定义误差的时候,有P,V,和R,所以不同的误差其实权重是不一样的,我们需要误差项的协方差矩阵来定义这个权重;
3. 因为(测量值=真实值+误差 当然对于R是乘的关系),所以我们可以写出来这个式子: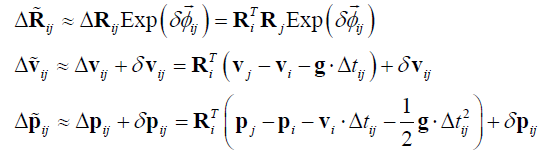
4. 误差项拆分出来之后,因为我们的加表和陀螺仪的偏置,之前假定是恒定的,但实际上是一个随机游走过程,因此,我们需要考虑偏置的更新;考虑到偏置的原因,我们可以将测量值重新定义如下:

这个公式中,头顶一横杠的是用原有的偏置计算出来的值,头顶是波浪线的是更新的偏置算出来的值;
5. 到这里,我们已经把测量值的表达式搞清楚了,无非是真实值,加上误差值,加上偏置的随机游走导致的波动值,这三项,现在这三项都加进去了,我们可以定义从i到j的预积分的误差值了。实际中我们优化的是误差值,使误差值为0
理想值:

根据第四步得到的测量值描述公式,我们得到误差描述公式:

6. 到这里还没结束,我们要优化的值 ,那么我们有误差了,我们需要误差对这些值的导数,即求雅克比,比较繁琐,可以参考资料。求得了导数,误差,我们就可以用G2O进行计算了,真是美极了;
,那么我们有误差了,我们需要误差对这些值的导数,即求雅克比,比较繁琐,可以参考资料。求得了导数,误差,我们就可以用G2O进行计算了,真是美极了;
---------------------------------------------------------------------------------------------------------------------------------------------------------------------
下面对其过程进行简要的描述:
IMU数据包含两部分,一部分是加表的数据,另一部分是陀螺仪的数据。我们通过这俩玩意儿可以观测到加速度和角速度,不过我们观察到的数据与实际值还有噪声和偏置,特别是低成本的IMU,这些导致的误差会更厉害

这俩公式就是模型部分了,偏差为b,噪声为η
我们还要知道,当增加一个小的时间时,R,V,P是如何变化的,即以下公式:

考虑到迭代,需要有初始i时刻,结束j时刻,以上公式改写:

这个时候,我们要清楚我们最终目的是干嘛,我们是想让他与i时刻的数据解耦,所以我要做一个从i到j 的变化量(对于R要考虑李代数的形式)

上面的这个公式是一个混沌体,既包括测量值,又包括偏置,又包括噪声,这么多玩意儿,如何处理?偏置不知道,我们就假定偏置是恒定的,我们先把噪声分离出来:




具体推导过程网上资料非常丰富,直接写上面的结果了。
到这里已经把误差项分离出来了,上式的左边是测量值,右边第一项是真实值,第二项是噪声值;我们可以把误差项单独拎出来,如下公式:


通过演化,推导,得到误差的一步递推公式:



从这几个公式可以看出来,从i时刻到J时刻,其实是一个时间段,那这个一步递推其实是针对这个时间段的叠加,因此在处理的时候,协方差也需要每个时刻都更新,从i时刻不断更新,直至j时刻。这个协方差可以在求解时,设置信息矩阵的时候用,度量误差中各个维度的权重;
剩下的就是针对测量值的推导描述了,测量值肯定不是只有噪声一项的,测量值除了噪声其实还有偏置导致的偏移,等等,在上面流程介绍中已经讲过了,具体如何推导,网上大把资料。
--------------------------------------------------------------------------------------------------------------------------------------------------------------------
那了解了这些理论知识了,我们需要知道在实际中如何使用呢?
实际中来了IMU的数据之后,我们要如何处理:
- 根据每一个时刻的IMU值,求delta_P,delta_V,delta_R这三个值就是纯运动方程就可以求了,递推性质,可以最终得到从I到j时刻的delta的总和;
- 递推求从i到J时刻delta的P,R,V对两个偏置的雅克比的值,这些值后面会用到
- 这一个时间段的delta的PVR都计算完了,雅克比也计算完了,那就对误差进行更新吧
- 使用G2O进行对误差的优化,那就使用G2O进行愉快的计算吧
定义误差,

举个例子,针对deltaP中 ,这个就是从i到j时间段的累计,如何算呢,直接用下面的式子就可以计算了
,这个就是从i到j时间段的累计,如何算呢,直接用下面的式子就可以计算了

因为是测量值,实际上已经考虑到噪声了,偏置用上一次的值就好(反正是迭代的)。
定义雅克比:
根据大佬的论文On-Manifold Preintegration for Real-Time Visual-Inertial Odometry,看着公式直接往上整就对了(想自己推导也可以,比较繁琐,但不复杂),无非就是误差方程对P,对R,对V和对偏置求导,其中第2步的求带结果在这个地方是有用的,根源在于这个误差对偏置的求导,和第2步对偏置求导结果部分是相似的,无非就是一个负号的区别,所以可以拿来用。不过deltaR对bg的求导结果还是差异很大的,注意一下。
更新更新,误差最小即可。