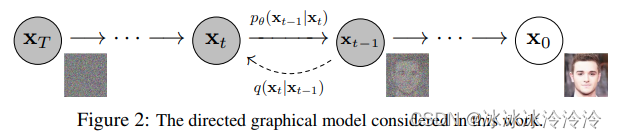
diffusion model本质上是隐变量模型
p
θ
(
x
0
)
:
=
∫
p
θ
(
x
0
:
T
)
d
x
1
:
T
p_\theta(\mathbf{x}_0):=\int p_\theta(\mathbf{x}_{0:T})d\mathbf{x}_{1:T}
pθ(x0):=∫pθ(x0:T)dx1:T,其中
x
0
∼
q
(
x
0
)
\mathbf{x}_0\sim q(\mathbf{x}_0)
x0∼q(x0)是可观测变量,
x
1
,
x
2
,
.
.
.
,
x
T
\mathbf{x}_1,\mathbf{x}_2,...,\mathbf{x}_T
x1,x2,...,xT是和可观测变量
x
0
\mathbf{x}_0
x0有相同维度的隐变量。
前向过程
真实数据的分布为
q
(
x
0
)
q(\mathbf{x}_0)
q(x0),前向过程是一个预定义的马尔科夫链,其中
q
(
x
t
∣
x
t
−
1
)
q(\mathbf{x}_t | \mathbf{x}_{t-1})
q(xt∣xt−1)加入高斯噪声:
q
(
x
t
∣
x
t
−
1
)
=
N
(
x
t
;
1
−
β
t
x
t
−
1
,
β
t
I
)
q(\mathbf{x}_t | \mathbf{x}_{t-1})=\mathcal{N}(\mathbf{x}_t;\sqrt{1−\beta_t}\mathbf{x}_{t−1},\beta_t\mathbf{I})
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)其中
0
<
β
1
<
β
2
<
.
.
.
<
β
T
<
1
0<\beta_1<\beta_2<...<\beta_T<1
0<β1<β2<...<βT<1是预定义的数值,可以用不同的variance schedule定义。 从
q
(
x
0
)
q(\mathbf{x}_0)
q(x0)开始,逐步加入高斯噪声,生成
x
1
,
x
2
,
.
.
.
,
x
T
\mathbf{x}_1,\mathbf{x}_2,...,\mathbf{x}_T
x1,x2,...,xT。如果variance schedule的选择合适,
x
T
\mathbf{x}_T
xT将是纯高斯噪声。
nice property
根据我们定义的前向过程,一个好的性质是
x
t
\mathbf{x}_t
xt可以直接采样从
x
0
\mathbf{x}_0
x0采样得到(高斯的和也是高斯),而不需要一步一步地采样:
q
(
x
t
∣
x
0
)
=
N
(
x
t
;
α
ˉ
t
x
0
,
(
1
−
α
ˉ
t
)
I
)
q(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\sqrt{\bar{\alpha}_t}\mathbf{x}_0,(1-\bar{\alpha}_t){\mathbf{I}})
q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I)其中
α
t
:
=
1
−
β
t
,
α
ˉ
t
:
=
Π
s
=
1
t
α
s
\alpha_t :=1−\beta_t, \bar{\alpha}_t := \Pi_{s=1}^{t} \alpha_s
αt:=1−βt,αˉt:=Πs=1tαs。 因为
β
t
\beta_t
βt是variance schedule定义的,所以
α
t
\alpha_t
αt也都是已知的。
逆向过程
逆向过程被定义为一个从
p
(
x
T
)
=
N
(
x
T
;
0
,
I
)
p(\mathbf{x}_T)=\mathcal{N}(\mathbf{x}_T;\mathbf{0},\mathbf{I})
p(xT)=N(xT;0,I)出发的马尔科夫链。 前向过程的形式和参数都是预定义的,但后向过程
p
(
x
t
−
1
∣
x
t
)
p(\mathbf{x}_{t-1} | \mathbf{x}_t)
p(xt−1∣xt)的形式和参数未知的,因为要计算这个条件概率需要知道所有可观测变量的分布。 我们使用一个神经网络来近似条件概率
p
(
x
t
−
1
∣
x
t
)
p(\mathbf{x}_{t-1} | \mathbf{x}_t)
p(xt−1∣xt),近似概率用
p
θ
(
x
t
−
1
∣
x
t
)
p_\theta(\mathbf{x}_{t-1} | \mathbf{x}_t)
pθ(xt−1∣xt)表示,其中
θ
\theta
θ是神经网络的参数,使用梯度下降法优化。 我们并不知道
p
(
x
t
−
1
∣
x
t
)
p(\mathbf{x}_{t-1} | \mathbf{x}_t)
p(xt−1∣xt)的形式和参数,这里我们假设它是高斯的。高斯分布有两个参数,分别是均值
μ
θ
\mu_\theta
μθ和方差
Σ
θ
\Sigma_\theta
Σθ,所以逆向过程可以表示为:
p
θ
(
x
t
−
1
∣
x
t
)
=
N
(
x
t
−
1
;
μ
θ
(
x
t
,
t
)
,
Σ
θ
(
x
t
,
t
)
)
p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_{t})=\mathcal{N}(\mathbf{x}_{t-1} ; \mu_\theta(\mathbf{x}_{t},t),\Sigma_\theta(\mathbf{x}_{t},t))
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))使用神经网络学习均值
μ
θ
\mu_\theta
μθ和方差
Σ
θ
\Sigma_\theta
Σθ。特别地,DDPM的作者将方差固定为常数,只学习均值。
参数推导
因为前向过程是预定义的,所以参数推导求的是逆向过程中的参数。 diffusion model是隐变量模型
p
θ
(
x
0
)
:
=
∫
p
θ
(
x
0
:
T
)
d
x
1
:
T
p_\theta(\mathbf{x}_0):=\int p_\theta(\mathbf{x}_{0:T})d\mathbf{x}_{1:T}
pθ(x0):=∫pθ(x0:T)dx1:T。 考虑最大化log likelihood来学习参数,但因为隐变量模型的likelihood没法直接表示,一般都是采用优化log likelihood的下界variational lower bound (ELBO)。
在diffusion model中,为了方便神经网络优化,我们将最大化问题转换为最小化问题,优化的目标是:
E
[
−
log
p
θ
(
x
0
)
]
≤
E
q
[
−
log
p
θ
(
x
0
:
T
)
q
(
x
1
:
T
∣
x
0
)
]
=
E
q
[
−
log
p
(
x
T
)
−
∑
t
≥
1
log
p
θ
(
x
t
−
1
∣
x
t
)
q
(
x
t
∣
x
t
−
1
)
]
:
=
L
\mathbb{E}[-\log p_\theta(\mathbf{x}_0)]\leq \mathbb{E}_q[-\log \frac{p_\theta(\mathbf{x}_{0:T})}{q(\mathbf{x}_{1:T}|\mathbf{x}_{0})}]= \mathbb{E}_q[-\log p_(\mathbf{x}_T)-\sum_{t\geq1}\log \frac{p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_{t})}{q(\mathbf{x}_{t}|\mathbf{x}_{t-1})}]:=L
E[−logpθ(x0)]≤Eq[−logq(x1:T∣x0)pθ(x0:T)]=Eq[−logp(xT)−t≥1∑logq(xt∣xt−1)pθ(xt−1∣xt)]:=L
L
L
L可以重写为 其中
q
(
x
t
−
1
∣
x
t
,
x
0
)
q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)
q(xt−1∣xt,x0)是高斯分布:
q
(
x
t
−
1
∣
x
t
,
x
0
)
=
N
(
x
t
−
1
;
μ
~
t
(
x
t
,
x
0
)
,
β
~
t
I
)
w
h
e
r
e
μ
~
t
(
x
t
,
x
0
)
:
=
α
‾
t
−
1
β
t
1
−
α
‾
t
x
0
+
α
t
(
1
−
α
‾
t
−
1
)
1
−
α
‾
t
x
t
β
~
t
:
=
1
−
α
‾
t
−
1
1
−
α
‾
t
β
t
q(\mathbf{x}_{t-1} | \mathbf{x}_t, \mathbf{x}_0)=\mathcal{N}(\mathbf{x}_{t-1}; \tilde\mu_t(\mathbf{x}_t,\mathbf{x}_0), \tilde\beta_t\mathbf{I}) \\ where~~~ \tilde\mu_t(\mathbf{x}_t,\mathbf{x}_0) := \frac{\sqrt{\overline\alpha_{t-1}}\beta_t}{1-\overline\alpha_{t}}\mathbf{x}_0 + \frac{\sqrt{\alpha_t}(1-\overline\alpha_{t-1})}{1-\overline\alpha_{t}}\mathbf{x}_t \\ \tilde\beta_t := \frac{1-\overline\alpha_{t-1}}{1-\overline\alpha_{t}}\beta_t
q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)whereμ~t(xt,x0):=1−αtαt−1βtx0+1−αtαt(1−αt−1)xtβ~t:=1−αt1−αt−1βt因为
L
L
L中都是高斯函数的KL散度,有闭合(closed form)的表达式。优化时将分别考虑各个
L
t
L_t
Lt。
L
T
L_T
LT是一个常数可以忽略,因为前向过程
q
q
q不包含可学习的参数。
L
0
L_0
L0中
p
θ
(
x
0
∣
x
1
)
p_\theta(\mathbf{x}_0|\mathbf{x}_1)
pθ(x0∣x1)使用一个单独的离散解码器建模。因为图像颜色是离散的,但模型中计算的是连续的。假设每个颜色被分为 256 个 bin,计算
p
θ
(
x
0
∣
x
1
)
p_\theta(\mathbf{x}_0|\mathbf{x}_1)
pθ(x0∣x1) 落在正确 bin 中的概率。在采样的最后直接展示
μ
θ
(
x
1
,
1
)
\mu_\theta(\mathbf{x}_1,1)
μθ(x1,1)。
L
t
−
1
L_{t-1}
Lt−1可以写为:
L
t
−
1
=
E
q
[
1
2
σ
2
∥
μ
~
t
(
x
t
,
x
0
)
−
μ
θ
(
x
t
,
t
)
∥
2
]
+
C
L_{t-1}=\mathbb{E}_{q}[\frac{1}{2\sigma^2}\|\tilde\mu_t(\mathbf{x}_t,\mathbf{x}_0)-\mu_\theta(\mathbf{x}_t,t)\|^2]+C
Lt−1=Eq[2σ21∥μ~t(xt,x0)−μθ(xt,t)∥2]+C用重参数化(reparameterizing)的技巧
x
t
(
x
0
,
ϵ
)
=
α
ˉ
t
x
0
+
(
1
−
α
ˉ
t
)
ϵ
,
ϵ
∈
N
(
0
,
I
)
\mathbf{x_t}(\mathbf{x_0},\epsilon)=\sqrt{\bar{\alpha}_t}\mathbf{x}_0+\sqrt{(1-\bar{\alpha}_t)}\epsilon, \epsilon \in \mathcal{N}(\mathbf 0, \mathbf I)
xt(x0,ϵ)=αˉtx0+(1−αˉt)ϵ,ϵ∈N(0,I)再通过参数化改写,优化目标变为
E
x
0
,
ϵ
[
β
t
2
2
σ
t
2
α
t
(
1
−
α
ˉ
t
)
∥
ϵ
−
ϵ
θ
(
α
ˉ
t
x
0
+
(
1
−
α
ˉ
t
)
ϵ
,
t
)
∥
2
]
\mathbb{E}_{\mathbf{x}_0,\epsilon}[\frac{\beta^2_t}{2\sigma_t^2\alpha_t(1-\bar\alpha_t)}\|\epsilon-\epsilon_\theta(\sqrt{\bar{\alpha}_t}\mathbf{x}_0+\sqrt{(1-\bar{\alpha}_t)}\epsilon,t)\|^2]
Ex0,ϵ[2σt2αt(1−αˉt)βt2∥ϵ−ϵθ(αˉtx0+(1−αˉt)ϵ,t)∥2]即用网络
ϵ
θ
\epsilon_\theta
ϵθ学习添加的噪声
ϵ
\epsilon
ϵ。
μ
θ
(
x
t
,
t
)
\mu_\theta(\mathbf{x}_{t},t)
μθ(xt,t)和
ϵ
θ
(
x
t
,
t
)
\epsilon_\theta(\mathbf{x}_{t},t)
ϵθ(xt,t)的关系如下:
μ
θ
(
x
t
,
t
)
=
1
α
t
(
x
t
−
β
t
1
−
α
ˉ
t
ϵ
θ
(
x
t
,
t
)
)
\mu_\theta(\mathbf{x}_{t},t)=\frac{1}{\sqrt{\alpha_t}}(\mathbf{x}_{t}-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}}\epsilon_\theta(\mathbf{x_t,t}))
μθ(xt,t)=αt1(xt−1−αˉtβtϵθ(xt,t))从
p
θ
(
x
t
−
1
∣
x
t
)
p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_{t})
pθ(xt−1∣xt)采样可以这样计算
x
t
−
1
=
1
α
t
(
x
t
−
β
t
1
−
α
ˉ
t
ϵ
θ
(
x
t
,
t
)
)
+
σ
t
z
,
z
∈
N
(
0
,
I
)
\mathbf{x}_{t-1}=\frac{1}{\sqrt{\alpha_t}}(\mathbf{x}_{t}-\frac{\beta_t}{\sqrt{1-\bar\alpha_t}}\epsilon_\theta(\mathbf{x_t,t}))+\sigma_t \mathbf{z}, \mathbf{z} \in \mathcal{N}(\mathbf 0, \mathbf I)
xt−1=αt1(xt−1−αˉtβtϵθ(xt,t))+σtz,z∈N(0,I)值得注意的是,可以用网络
μ
θ
\mu_\theta
μθ学习
μ
~
t
\tilde\mu_t
μ~t,也可以用网络
ϵ
θ
\epsilon_\theta
ϵθ学习添加的噪声
ϵ
\epsilon
ϵ,它们的区别只在于参数化的方式不同。用
ϵ
\epsilon
ϵ表示类似Langevin动力学,可以得到类似denoising score matching的优化目标。在作者的实验中,它们都可以得到较好的结果。
简化
L
t
−
1
L_{t-1}
Lt−1可以进行简化,简化后的目标是:
E
x
0
,
ϵ
∥
ϵ
−
ϵ
θ
(
α
ˉ
t
x
0
,
(
1
−
α
ˉ
t
)
ϵ
,
t
)
∥
2
\mathbb{E}_{\mathbf{x}_0,\epsilon}\|\epsilon-\epsilon_\theta(\sqrt{\bar{\alpha}_t}\mathbf{x}_0,\sqrt{(1-\bar{\alpha}_t)}\epsilon,t)\|^2
Ex0,ϵ∥ϵ−ϵθ(αˉtx0,(1−αˉt)ϵ,t)∥2简化版删去了原有的权重,所以是一个加权的变分界,其减小了
t
t
t较小时的权重。实验显示简化版的优化目标效果更好。
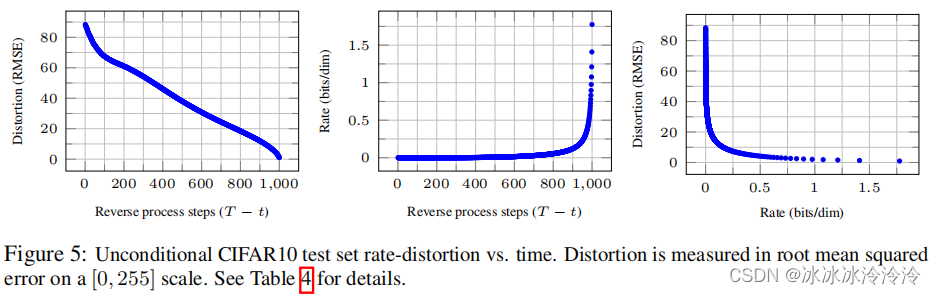
渐进式编码(Progressive coding)
在作者的实验中,diffusion model生成图片的质量很好,但负log-likelihood(负log-likelihood也就是lossless codelength)不如其他的likelihood-based生成模型低。 在作者的实验中,
L
0
L_0
L0占了所有
L
∗
L_*
L∗的一半以上,说明一半以上的lossless codelength用于描述难以观察的失真。因此,作者认为diffusion model是一个优秀的有损压缩器。 考虑一个传输过程,该过程按照T至0的顺序传输图像。用均方误差计算distortion,在时刻t累计接收到的比特数量计算rate。下图可以看到,在低rate的区域distortion变化很剧烈,说明少量的rate就能表示图像大部分的信息。