现在我们看一个单环二阶系统的单位阶跃响应。一个闭环反馈控制系统如下图所示
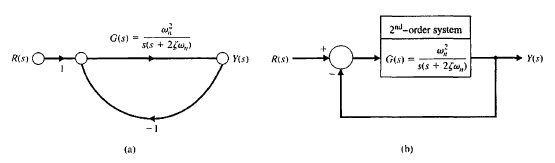
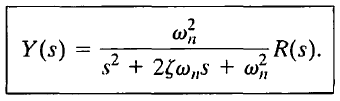
已知该闭环系统的转换方程为:

把受控系统的转换方程代入进去得到:
如果给一个阶跃输入,那么

查拉普拉斯逆变换表我们得到时域输出为


其中

θ同时也是特征方程在s域的根与原点的连线与横坐标轴的角度(仔细品味下这句话)。
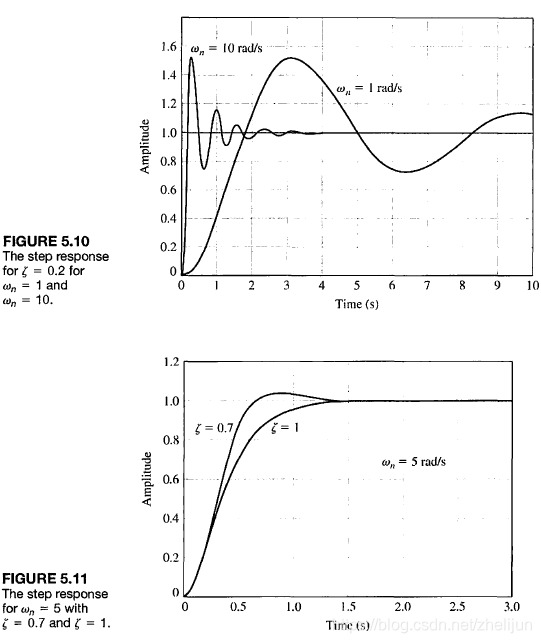
通过软件仿真得到上述瞬时响应对于不同阻尼比的输出,如下图(所以它 = 1 这条线是怎么画的,此时β为0 啊)
matlab仿真程序(实时编辑器编写)
syms beta zeta omegat theta
zeta = 0.1;
beta = sqrt(1-zeta^2);
theta = acos(zeta);
omegat = [0:0.1:14];
y1 = 1-(1/beta)*exp(1).^(-zeta.*omegat).*sin(omegat.*beta+theta);
%0.2
zeta = 0.2;
beta = sqrt(1-zeta^2);
theta = acos(zeta);
omegat = [0:0.1:14];
y2 = 1-(1/beta)*exp(1).^(-zeta.*omegat).*sin(omegat.*beta+theta);
%0.4
zeta = 0.4;
beta = sqrt(1-zeta^2);
theta = acos(zeta);
omegat = [0:0.1:14];
y3 = 1-(1/beta)*exp(1).^(-zeta.*omegat).*sin(omegat.*beta+theta);
%0.7
zeta = 0.7;
beta = sqrt(1-zeta^2);
theta = acos(zeta);
omegat = [0:0.1:14];
y4 = 1-(1/beta)*exp(1).^(-zeta.*omegat).*sin(omegat.*beta+theta);
%0.9
zeta = 0.9;
beta = sqrt(1-zeta^2);
theta = acos(zeta);
omegat = [0:0.1:14];
y5 = 1-(1/beta)*exp(1).^(-zeta.*omegat).*sin(omegat.*beta+theta);
plot
plot(omegat,y1,omegat,y2,omegat,y3,omegat,y4,omegat,y5)
legend({'0.1','0.2','0.4','0.7','0.9'})

可以发现,当阻尼比减小时,特征方程的根更靠近虚轴,与此同时响应变得更加振荡。下图则更加全面的展现出阻尼比的变化对瞬时输出的影响。

单位冲激响应的拉氏变换为R(s)=1,因此一个输入单位冲激响应的二阶系统的输出为

转换成时域为

通过观察不难发现这个时域响应同时也是单位阶跃输入响应的求导。下图展示了对于不同的阻尼比单位激励响应的输出

一个合格的控制系统设计师应该能够通过从阶跃或者冲激响应中几个性能指标来判断系统的好坏。
标准的系统性能的衡量通常由下图(图5.7)所示的几个指标表示

5.3.1 rise time and peak time
响应的速度一般由rise time-Tr 和 Peak time-Tp来描述。对于有超调的欠阻尼系统,0~100% rise time是一个有用的参数。如果系统过阻尼,那么不存在peak time,rise time 通常定义成(系统从0增加到最终响应的90% )rise time。
5.3.2 超调量(percent overshoot)
还有一个用来描述实际输出与阶跃输入相似程度的参数——超调量(percent overshoot)定义为:
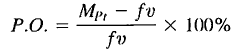
对于一个单位阶跃输入,Mpt 指时域响应的峰值,fv 指最终响应。一般来说,终值等于输入,但许多系统的终值不等于输入,对于一个受到单位阶跃输入的方程5.8描述的系统,fv=1。
5.3.3 稳定时间(settling time)
稳定时间(settling time)Ts定义为系统的响应收敛于输入信号一定范围内所需要的时间。这个范围通常定义成2%。对于一个具有阻尼常数

以及被方程5.9描述的二阶闭环系统,我们习惯于需寻找时间当响应开始保持在终值上下2%范围内时的时间Ts。用公式表示为
上述条件约等于
因此我们有:

因此我们可以定义稳定时间为特征方程主根的时间常量τ的四倍(τ=1/ζωn)。正如图5.7,系统的稳态误差则可以通过系统的阶跃响应来度量。
5.3.4 系统瞬时响应
系统的瞬时响应可以由以下两个方面描述:
- 响应的速度,体现在rise time以及peak time
- 最终响应与期望值的接近程度,体现在,超调量以及settling time
我们不难发现,上述两个方面常常时互相矛盾的,因此需要我们在响应速度和准确度上做出权衡。为了搞清楚响应速度与准确度之间的关系,我们先看时间响应的峰值Mpt,以及到达峰值所需要的时间Tp分别与阻尼比ζ的关系。以5.8式为例,首先我们用输出对t求导,得到:
也就是5.10式,对其使用拉普拉斯反变换得到时域关系式5.11。该式在满足 ωnβt = π 的时候值为0,因此对于5.8式的二阶系统,当时间t满足

时有极大值,把上式带入5.8的时域关系式里面得到(惭愧,我没化出来这个形式):
因此,系统的超调为:
我们用软件分别画出超调PO,ωnTs与阻尼比的关系:

我们希望超调PO和ωnTs都小,但是图像告诉我们一方减小的同时另一方会增大。因此在设计系统的时候我们需要在超调和响应速度之间做出一定的权衡妥协。
阶跃响应的速度也可以用系统响应从阶跃输入的10%变化到90%所花的时间Tr1表示。我们换个角度来看这个问题,如果用Tr1来表征系统的响应速度。归一化 rise time(ωnTr1)与ζ的关系如下:

这是一个非线性关系,在0.3<=ζ<=0.8的范围内我们可以用一个线性公式来拟合:
(这是对所有二阶系统都成立的经验公式,吗?)
通过观察上式,我们发现,
- 对于给定的ζ,要使系统响应速度变快的话,增大ωn就行,而且通过之前的分析我们发现,超调量与ωn大小无关。但由于稳定性的限制,ωn也不能任意的增大。
- 而对于给定的ωn,要想使系统响应更快的话,需要减小ζ,而ζ的变化同时会引起超调量的改变。
上述关系由下面两张图表示: