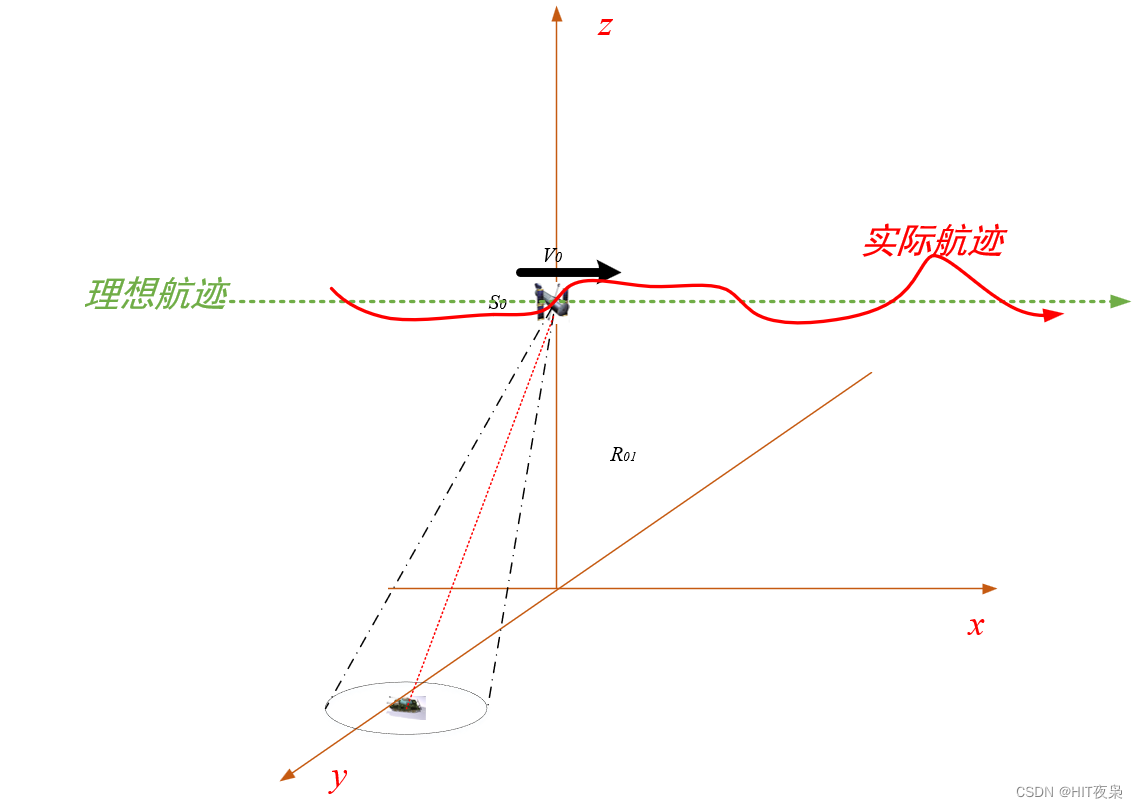
不同于光学图像,SAR图像的获取的本质是方位信号的累积结果,也就是说是在合成孔径时间内的电磁波照射结果。类似于光学成像中的延时拍照。通常使用手机拍照时,若拍照的手臂出现抖动,那么得到的照片就会变模糊。同样的现象也会出现在SAR图像中。SAR的成像时,雷达天线是安装在各种运动平台上的,如卫星、飞机、无人机、飞艇、导弹等,这些平台在实际的飞行过程中,受环境及动力影响,通常无法保持匀速直线运动,这将导致在进行方位压缩时存在相位误差,该误差会影响成像质量,使成像效果模糊(模糊的本质是方位匹配滤波函数与实际的方位信号产生失配)。因此运动补偿是SAR成像不可缺少的环节。
其实,由平台运动引起的运动误差是SAR“相位误差”中的一个主要部分。在相位误差中除了运动误差(需要运动补偿进行消除),还有大气传播误差、地面曲率误差等。这些误差在不同的场景中要具体考虑。这里主要讨论由平台运动引起的相位误差补偿,即运动补偿。
运动补偿主要分为两类:基于平台运动数据的粗补偿和基于回波数据的精细补偿。由于飞行平台上的运动数据主要来源于导航仪(如 GPS、北斗 等),它的精度不高,只能补偿掉较大的运动误差。要获得高质量的SAR图像就必须从回波数据中估计多普勒参数,进而实现SAR图像的精确聚焦。
在多普勒参数中,多普勒中心影响图像的位置,而多普勒调频率影响SAR图像的模糊 程度。在运动补偿中需要对多普勒调频率进行精确计算从而消除图像模糊现象。主要方法由:图像偏置法,最大对比度自聚焦算法,最大熵聚焦算法和相位梯度法等。下面介绍几种常用的运动补偿方法。
1.相位梯度自聚焦算法-PGA
PGA算法是各种运动平台最常用的运动补偿算法。它不是基于相位误差估计模型,而是基于 SAR 图像中的强散射点,直接进行运动误差估计,可以对任意阶数的多普勒误差进行估计。
PGA 算法主要包括四步,圆周移位、加窗、相位梯度估计和迭代相位校正。
①圆周位移
从每个距离单元中选取最强散射点(SAR图像较大时,可只选取一部分距离单元),并将其圆周移位到图像中心,同时也去除了散射点的多普勒中心频率。圆周移位不仅仅是对最强散射点进行排列,同时也去除了多普勒频率,只保留下了相位误差信息。
②加窗
对圆周移位后的图像域数据进行加窗,提高信噪比,减少背景杂波的影响,提高相位误差估计的准确度。加窗的宽度可根据图像的模糊程度来确定。
③相位梯度估计
相位梯度估计是 PGA 算法的核心部分,它是在距离多普勒域完成的。因此首先应该对加窗的图像数据进行IFFT,再计算两个相位点的相位误差梯度:

Sr为加窗内的IFFT信号。d(n)为

将所有的相位点的相位误差梯度相加可得到总的相位误差。
④迭代相位校正
利用相位误差对 SAR 距离多普勒数据进行补偿。并将补偿过的数据FFT转换到图像域,用作下一次迭代。反复迭代几次(一般4-6次即可),图像会越来越聚焦。
下图为PGA聚焦的一幅星载SAR图像。

2、最大对比度算法(与最大熵算法类似)
当平台以理想状态下运动时,进行方位维压缩之后,所得到的目标聚焦函数应该是 sinc 函数,匹配后的图像能量集中,目标与背景的对比度高;当飞行平台不能按照理想状况运动时,此时匹配滤波函数与实际的方位信号存在存在多普勒匹配误差,导致信号主瓣展宽,旁瓣升高,目标与背景部分的对比度下降。
所以,以信号的对比度位指标可以对 SAR 成像质量进行评估,当图像的对比度最大时,SAR 成像的方位匹配压缩效果应为最好。因此,SAR图像的运动补偿问题就转换为求取图像对比度最大值的问题,就是在匹配函数中搜索最优的多普勒调频率。
关于怎样搜索调频率的值是一类搜索策略问题。以进退法为例,其运动补偿过程如下:
①根据平台运动数据,设计方位匹配滤波函数并对回波数据进行聚焦处理;
②计算所得聚焦图像的对比度;
③确定调频率迭代步长,使用迭代调频率聚焦的图像计算对比度,并与②比较;
④根据比较结果修正迭代步长,如果新计算对比度大于原对比度,则迭代值不变,继续迭代,否则令迭代步长变号,并将迭代步长绝对值减半,继续迭代。同时计算图像对比度;
⑤重复③、④直到迭代步长小于某值,则认为找到了正确的调频率。