| 这也是我在ubuntu里面安装ROS的第N次,以前每次安装过程都忘记总结了,导致每次安装ROS都浪费了很多的时间用来解决各种问题。为了避免自己以后出现问题需要再安装,所以写这篇博客总结一下,这次是我安装最快,问题最少也最好解决的一次,在网上看了好多安装方法,有些会出现问题,不知道什么原因,解决办法也有点复杂,因此希望这个对大家有用! |
Ubuntu18.04安装ROS Melodic目录
一、ubuntu不同的版本对应ROS不同的版本
操作系统为Ubuntu 18.04 LTS 64bit应采用ROS版本为ROS Melodic。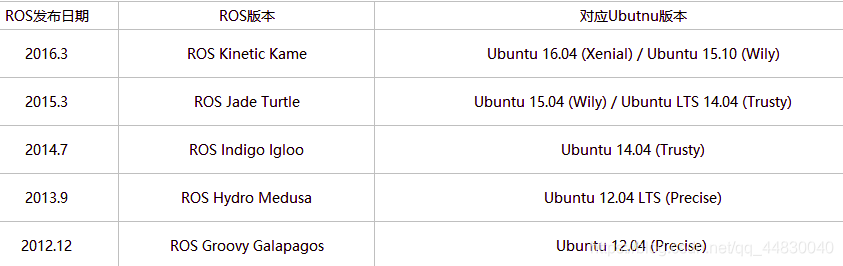
二、配置Ubuntu软件库
配置Ubuntu存储库以允许"main", “restricted” ,“universe,” and “multiverse”,如图所示

三、安装过程及问题解决
1.设置安装源
- 避免后面会出现无法定位软件包的错误,这里ROS提供了国内的安装源,添加国内安装源命令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'

2.设置密钥
- 若密钥服务器hkp://ha.pool.sks-keyservers.com:80无法添加成功,则可以尝试
hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.net:80
- 我使用的是下面这句命令是执行成功了的
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116

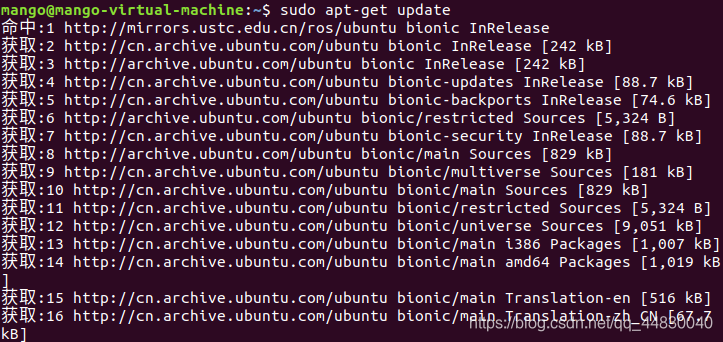
3.更新Ubuntu 18.04 LTS的最新可用软件包列表
sudo apt update
-
如果出现如下错误
W: GPG 错误:http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
E: 仓库 “http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease” 没有数字签名。
N: 无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
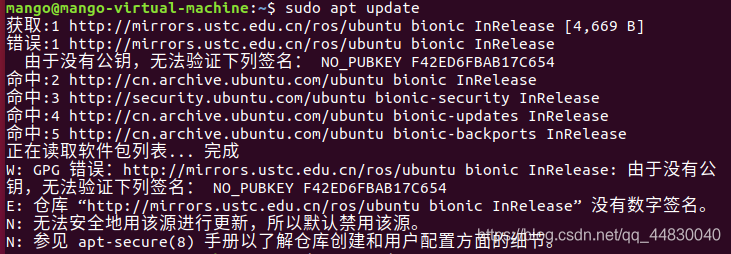
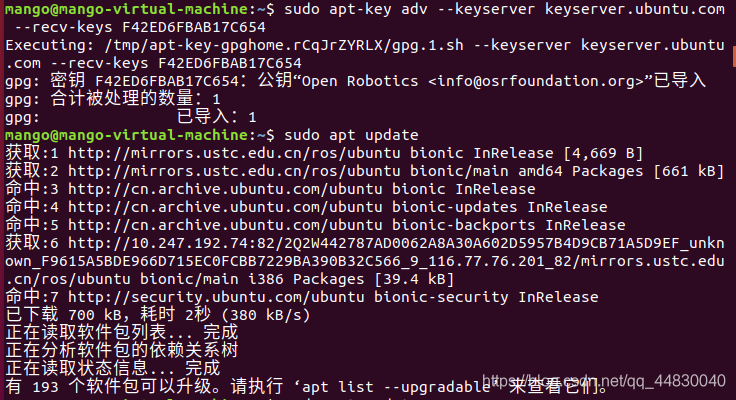
解决办法,执行如下命令
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
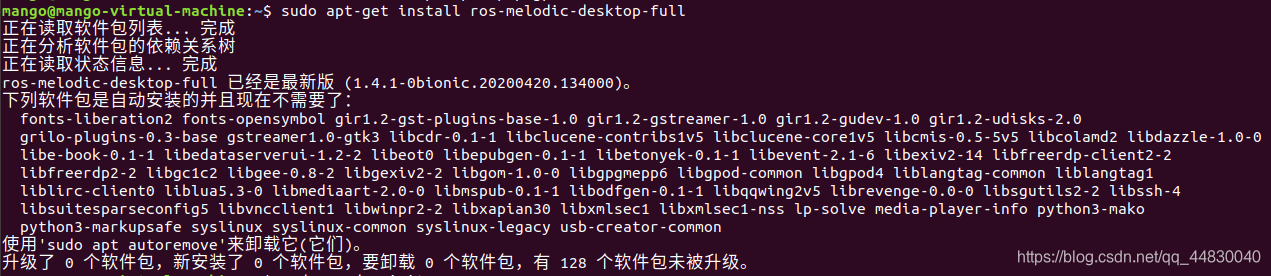
4.开始安装ROS Melodic
sudo apt-get install ros-melodic-desktop-full
-
如果出现如下问题
E: 无法获得锁 /var/lib/dpkg/lock-frontend - open (11: 资源暂时不可用)
E: 无法获取 dpkg 前端锁 (/var/lib/dpkg/lock-frontend),是否有其他进程正占用它?

解决办法,执行如下命令,删除 /var/lib/dpkg/lock-frontend - open
ls /var/lib/dpkg/lock-frontend
sudo rm -r -f /var/lib/dpkg/lock-frontend
sudo rm -r -f /var/lib/dpkg/lock

再执行sudo apt-get install ros-melodic-desktop-full命令,成功运行如图所示
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)