Ubuntu16.04及ROS Kinetic环境下安装使用RealSense SR300
1、准备条件
需要安装Ubuntu16.04及ROS Kinetic。
2、安装驱动
安装realsense的驱动流程可以根据Github上的官方推荐步骤来,链接:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
如果已经满足了准备条件,就可以开始了。先检测一下是否满足吧:
uname -r
如果>=4.4.0-50的版本就可以继续向下进行了,否则需要升级你的Ubuntu内核。
先安装一些依赖:
sudo apt-get install libusb-1.0-0-dev pkg-config libgtk-3-dev
安装glfw3库:
sudo apt-get install libglfw3-dev
下面就在安装位置下载realsense库:
sudo git clone https://github.com/IntelRealSense/librealsense.git
进入下载的librealsense路径下,再执行:
mkdir build && cd build
cmake ../
cmake ../ -DBUILD_EXAMPLES=true
执行安装:
make && sudo make install
再安装Video4Linux视频内核驱动,这个过程中不能插上Realsense。在librealsense的路径下执行:
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
安装Openssl库:
sudo apt-get install libssl-dev
编译配置文件:
./scripts/patch-realsense-ubuntu-xenial.sh
提示完成后,插上Realsense,再执行:
sudo dmesg | tail -n 50
可无失败信息则可验证安装驱动成功。
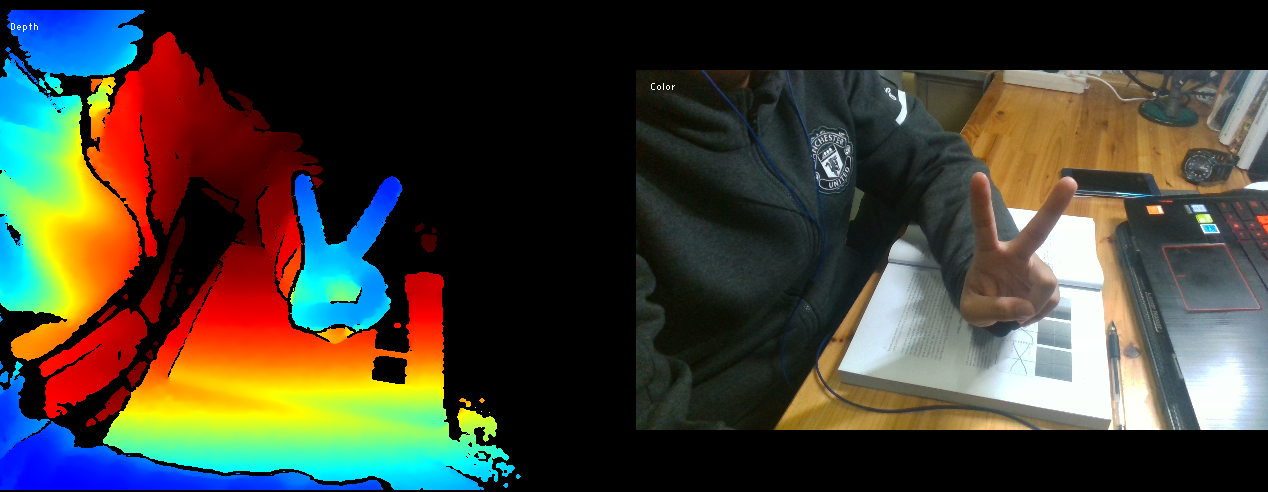
此时可以进入librealsense/build/examples文件夹,执行:
cd capture
./rs-capture
会出现Realsense拍摄的彩色图像和深度图,如下所示:
3、在ROS Kinetic环境下使用RealSense
安装ros下的realsense包:
sudo apt-get install ros-kinetic-realsense-camera
终端执行:
roscore
打开一个新终端执行:
roslaunch realsense_camera sr300_nodelet_rgbd.launch
无报错时,就可以执行:
rosrun rviz rviz
选择CloudPoints2,就可以看到Realsense sr300获得的点云信息了。
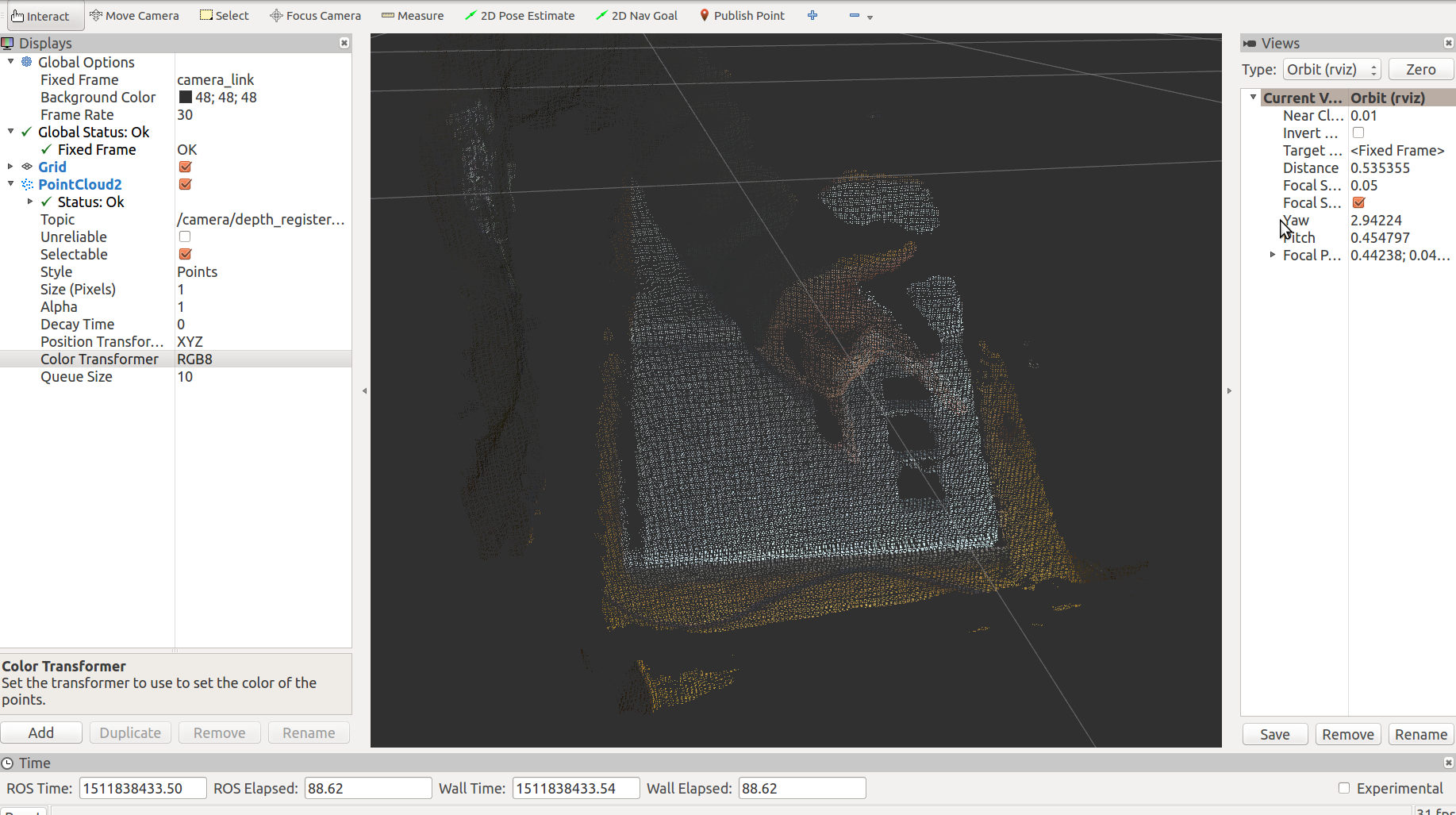
但值得注意的是,从ros中获得的realsense点云信息是栅格化后的结果,丢失了不少原有的点云信息。
参考:
[1]http://www.ncnynl.com/archives/201703/1443.html
[2]http://blog.csdn.net/may0324/article/details/50981540
[3]https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md