一、PMSM工作原理
相关文章:
永磁同步电机概述 ;PMSM与BLDC区别;永磁无刷直流电机与永磁同步电机比较和分析
永磁同步电机的工作原理简单来说就是定子通交流电产生旋转磁场,转子为永磁体,定子产生的磁场带动永磁体旋转,转速为同步转速。同步电机的特点是无论是否带载,都以同步转速运行,只要在同步电机的带载范围以内,电机都将以同步转速旋转。而永磁同步电机的特点就是将转子的励磁绕组换成了永磁体。
1.同步电机工作原理(来源:《电机学》李发海)
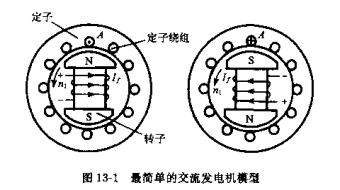
上图是一个简单的交流发电机模型(从电机轴向看的示意图),它是由定子、转子两大部分组成。定子和转子之间是空气隙。定子是一个圆筒形的铁心,在靠近铁芯内表面的槽里嵌放了导体。把这些导体按照一定的规律连接起来,叫定子绕组,也叫电枢绕组。圆筒形的铁心中间是可以旋转的转子,转子上装了主磁极,主磁极可以是永磁体,也可以是电磁铁,是在每个主磁极的铁芯上都套上一个线圈,把这些线圈在按照一定的规则连接起来就是励磁绕组。给励磁绕组通上直流电流,各个磁极就表现出一定的极性。
当转子被拖动以恒定转速
n
1
n_{1}
n1相对转子逆时针转动时,定子铁心槽里的导体就与主磁极有了相对运动,切割磁感线,产生感应电动势,其中(a)图方向按照右手定则可以判断是向纸面外的,(b)图方向是向内的。由此可以判断出主磁极每旋转一周,导体A里面的感应电动势瞬时实际方向交变一次,这是一对主磁极的情况,转子上可以有
p
p
p对主磁极,所以当电机的转子每转一周,就有
p
p
p对主磁极经过定子上的导体A,在导体A上的感应电动势就变化了
p
p
p个周期,若电机的转速为
n
1
n_{1}
n1,电机转子每秒转了
n
1
/
60
n_{1}/60
n1/60,则导体A里面的感应电动势频率
f
f
f为:
f
=
n
1
p
60
[
H
z
]
f= {n_{1}p \over60}[Hz]
f=60n1p[Hz]
从上式可以看出,当电机的极对数和转速一定时,频率
f
f
f就是固定值。
如果把一台三相同步电机作为电动机运行,就必须在定子的三项绕组里面通入三相交流电。三相交流电流流过定子的三相绕组,就会产生一个旋转磁场(后面详细解释),带动主磁极旋转。
下图为电机绕组截面示意图,图中U1、V1、W1为绕组首端,U2、V2、W2为绕组末端。

如图所示,三相绕组依次通电就能产生黑色箭头所指的旋转磁场
2.永磁同步电机数学模型及坐标变换(来源:《现代电机控制技术》 王成元)
2.1旋转磁场

在图a中,由定子三相绕组轴线ABC构成空间三相轴系。取A轴与Re轴重合(图b),则B轴的空间位置角度为
a
=
e
j
120
°
a=e^{j120°}
a=ej120°,C轴位置角度为
a
2
=
e
j
240
°
a^{2}=e^{j240°}
a2=ej240°。此处的a和
a
2
a^{2}
a2为空间算子。对于定子三相绕组而言,当通以图a所示的正向电流
i
a
,
i
b
,
i
c
i_{a},i_{b},i_{c}
ia,ib,ic时,分别产生沿着各自绕组轴线脉动的空间磁动势波。三相绕组的轴线在空间呈120度对称分布,我们可以用电流(电压)空间矢量来表示。
假设三相对称正弦相电压的瞬时值表示为
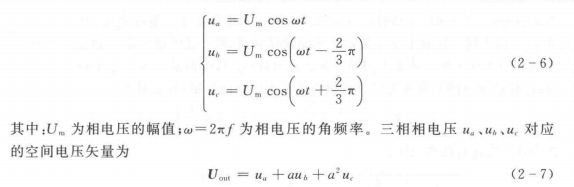

因此, 三相对称正弦电压对应的空间电压矢量运动轨迹如图 2 - 2 所示。从图 2 - 2
中可以看出,电压空间矢量
U
o
u
t
U_{out}
Uout, 顶点的运动轨迹为一个圆,且以角速度 ω 逆时针旋
转。根据空间矢量变换的可逆性,可以想象若空间电压矢量
U
o
u
t
U_{out}
Uout的顶点运动轨迹为
一个圆,则原三相电压越趋近于三相对称正弦波 。三相对称正弦电压供电是理想的
供电方式,也是逆变器交流输出电压控制的追求目标。实际上,通过空间矢量变换,
可以将逆变器三相输出的 3 个标量的控制问题转化为一个矢量的控制问题。

2.2三相PMSM的基本数学模型

ABC电压方程:
{
u
a
=
r
s
i
a
+
d
Ψ
a
d
t
u
b
=
r
s
i
b
+
d
Ψ
b
d
t
u
c
=
r
s
i
c
+
d
Ψ
c
d
t
\begin{cases} u_{a}=r_{s}i_{a}+\frac{d\Psi_{a}}{dt} \\ u_{b}=r_{s}i_{b}+\frac{d\Psi_{b}}{dt} \\ u_{c}=r_{s}i_{c}+\frac{d\Psi_{c}}{dt} \end{cases}
⎩⎪⎨⎪⎧ua=rsia+dtdΨaub=rsib+dtdΨbuc=rsic+dtdΨc
磁链方程:
{
Ψ
a
=
L
s
i
a
+
Ψ
f
sin
θ
Ψ
b
=
L
s
i
b
+
Ψ
f
sin
(
θ
−
2
3
π
)
Ψ
c
=
L
s
i
c
+
Ψ
f
sin
(
θ
−
4
3
π
)
\begin{cases} \Psi_{a}=L_{s}i_{a}+\Psi_{f}\sin{\theta}\\ \Psi_{b}=L_{s}i_{b}+\Psi_{f}\sin{(\theta-\frac{2}{3}\pi)}\\ \Psi_{c}=L_{s}i_{c}+\Psi_{f}\sin{(\theta-\frac{4}{3}\pi)} \end{cases}
⎩⎪⎨⎪⎧Ψa=Lsia+ΨfsinθΨb=Lsib+Ψfsin(θ−32π)Ψc=Lsic+Ψfsin(θ−34π)
L
s
L_{s}
Ls为定子绕组电感,其中包括自感和互感。
由磁链方程可以看出,定子磁链是转子位置角
θ
\theta
θ的函数。
电磁转矩
T
e
T_{e}
Te等于磁场储能对机械角度
θ
\theta
θ位移的偏导
T
e
=
1
2
p
n
∂
∂
θ
(
i
3
s
T
⋅
Ψ
3
s
)
T_{e}=\frac{1}{2}p_{n}\frac{\partial}{\partial\theta}(i^{T}_{3s}\cdot\Psi_{3s} )
Te=21pn∂θ∂(i3sT⋅Ψ3s)
其中,
p
n
p_{n}
pn为三相PMSM的极对数
i
3
s
=
[
i
A
i
B
i
C
]
i_{3s}=\begin{bmatrix} i_{A} \\ i_{B} \\ i_{C} \end{bmatrix}
i3s=⎣⎡iAiBiC⎦⎤,
Ψ
3
s
=
[
Ψ
A
Ψ
B
Ψ
C
]
\Psi_{3s}=\begin{bmatrix} \Psi_{A} \\ \Psi_{B} \\ \Psi_{C} \end{bmatrix}
Ψ3s=⎣⎡ΨAΨBΨC⎦⎤
可以看出三相PMSM的数学模型是一个比较复杂且强耦合的多变量系统。为了方便后面控制器的设计,必须采用合适的坐标变换对数学模型进行降阶和解耦变换。
2.3三相PMSM的坐标变换
为了简化自然坐标系下三相PMSM的数学模型,采用的坐标变换通常包括静止坐标变换(Clark变换)和同步旋转坐标变换(Park变换)。

2.3.1 Clark变换
由基尔霍夫电流定律,在任一时刻,流入节点的电流之和等于留出节点的电流之和,也就是说,
i
A
+
i
B
+
i
C
=
0
i_{A}+i_{B}+i_{C}=0
iA+iB+iC=0
所以三相坐标系就可以变换成新的直角坐标系(
α
−
β
\alpha-\beta
α−β坐标系),变换公式如下:
{
i
α
=
i
A
−
cos
2
π
3
i
B
−
cos
2
π
3
i
C
i
β
=
sin
2
π
3
i
B
−
sin
2
π
3
i
C
\begin{cases} i_{\alpha}=i_{A}-\cos{\frac{2\pi}{3}}i_{B}-\cos{\frac{2\pi}{3}}i_{C}\\ i_{\beta}=\sin{\frac{2\pi}{3}}i_{B}-\sin{\frac{2\pi}{3}}i_{C} \end{cases}
{iα=iA−cos32πiB−cos32πiCiβ=sin32πiB−sin32πiC
在该坐标系下,我们要控制电机,依然要跟踪两个正弦信号,还是非线性的,不利于控制。
2.3.2 Park变换
这个变换在CLark变换的基础上将
α
−
β
\alpha-\beta
α−β坐标系旋转
θ
e
\theta_{e}
θe度,得到新的坐标系就是
d
−
q
d-q
d−q坐标系。其中
θ
e
\theta_{e}
θe是转子当前的机械角度,变换公式如下:
{
i
d
=
i
α
cos
θ
e
+
i
β
sin
θ
e
i
q
=
−
i
α
sin
θ
e
+
i
β
cos
θ
e
\begin{cases} i_{d}=i_{\alpha}\cos\theta_{e}+i_{\beta}\sin\theta_{e}\\ i_{q}=-i_{\alpha}\sin\theta_{e}+i_{\beta}\cos\theta_{e} \end{cases}
{id=iαcosθe+iβsinθeiq=−iαsinθe+iβcosθe
这个坐标系就是始终跟着转子旋转的。
2.3.3 同步旋转坐标系下的数学模型
定子电压方程为:
{
u
d
=
R
i
d
+
d
d
t
Ψ
d
−
ω
e
Ψ
q
u
q
=
R
i
q
+
d
d
t
Ψ
q
−
ω
e
Ψ
d
\begin{cases} u_{d}=Ri_{d}+\frac{d}{dt}\Psi_{d}-\omega_{e}\Psi_{q}\\ u_{q}=Ri_{q}+\frac{d}{dt}\Psi_{q}-\omega_{e}\Psi_{d} \end{cases}
{ud=Rid+dtdΨd−ωeΨquq=Riq+dtdΨq−ωeΨd
定子磁链方程为:
{
Ψ
d
=
L
d
i
d
+
Ψ
f
Ψ
q
=
L
q
i
q
\begin{cases} \Psi_{d}=L_{d}i_{d}+\Psi_{f}\\ \Psi_{q}=L_{q}i_{q} \end{cases}
{Ψd=Ldid+ΨfΨq=Lqiq
此时电磁转矩方程可以写为:
T
e
=
3
2
p
n
i
q
[
i
d
(
L
d
−
L
q
)
+
Ψ
f
]
T_{e}=\frac{3}{2}p_{n}i_{q}[i_{d}(L_{d}-L_{q})+\Psi_{f}]
Te=23pniq[id(Ld−Lq)+Ψf]
定义
β
\beta
β为转矩角,有:
i
d
=
i
s
cos
β
,
i
q
=
i
s
sin
β
i_{d}=i_{s}\cos\beta,i_{q}=i_{s}\sin\beta
id=iscosβ,iq=issinβ
带入上式可得,
T
e
=
p
n
[
Ψ
f
i
s
sin
β
+
1
2
(
L
d
−
L
q
)
i
s
2
sin
2
β
]
T_{e}=p_{n}[\Psi_{f}i_{s}\sin\beta+\frac{1}{2}(L_{d}-L_{q})i^{2}_{s}\sin2\beta]
Te=pn[Ψfissinβ+21(Ld−Lq)is2sin2β]
括号内的第一项是由定子电流与永磁体磁场相互作用产生的电磁转矩,所以
β
\beta
β角实际上是定子三相基波合成磁动势轴线与永磁体基波励磁磁场轴向间的空间电角度。
括号内的第二项是由转子凸极效应引起的,称为磁阻转矩。
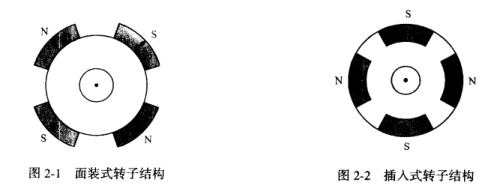
对于面装式转子,由于永磁体的磁导率很低(近似空气磁导率),所以直轴和交轴的电感相同(Ld=Lq),所以不存在磁阻转矩。可以控制定子电流的直轴分量为零,每单位定子电流产生的转矩值最大,可以获得快速的转矩相应。
对于嵌入式转子,直轴磁导率低于交轴磁导率,所以(Ld<Lq),可以利用这一特性控制转矩角
β
\beta
β提高输出转矩和扩大转速范围。
3. 三相逆变电路与SVPWM调制算法