RMSprop 全称 root mean square prop 算法,和动量方法一样都可以加快梯度下降速度。关于动量方法的内容可以参考这篇博文模型优化-动量方法。
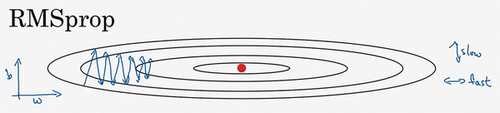
动量方法借助前一时刻的动量,从而能够有效地缓解山谷震荡以及鞍部停滞问题。而 RMSprop 对比动量方法的思想有所不同,以 y = wx + b 为例,因为只有两个参数,因此可以通过可视化的方式进行说明。
假设纵轴代表参数 b,横轴代表参数 w,由于 w 的取值大于 b,因此整个梯度的等高线呈椭圆形。可以看到越接近最低点(谷底),椭圆的横轴与纵轴的差值也越大,正好对应我们先前所说的山谷地形。
上图中可以看到每个点的位置,以及这些点的梯度方向,也就是说,每个位置的梯度方向垂直于等高线。那么在山谷附近,虽然横轴正在推进,但纵轴方向的摆动幅度也越来越大,这就是山谷震荡现象。如果使用的随机梯度下降,则很有可能不断地上下震荡而无法收敛到最优值附近。所以,我们向减缓参数 b 方向(纵轴)的速度,同时加快参数 w 方向(横轴)的速度。
【计算过程】:
单独计算每个参数在当前位置的梯度。
d
w
i
=
∂
L
(
w
)
∂
w
i
dw_{i} = \frac{\partial L(w)}{\partial w_i}
dwi=∂wi∂L(w)
计算更新量。
S
d
w
i
=
β
S
d
w
i
+
(
1
−
β
)
d
w
i
2
Sdw_{i} = \beta Sdw{i} + (1 - \beta)dw_{i}^2
Sdwi=βSdwi+(1−β)dwi2 需要注意的是
d
w
2
dw^2
dw2 是指对 dw 做平方处理。
更新参数。
w
i
=
w
i
−
η
d
w
i
S
d
w
i
w_i = w_i - \eta \frac{dw_i}{\sqrt{Sdw_i}}
wi=wi−ηSdwidwi
需要注意
S
d
w
i
Sdw_i
Sdwi 有可能为 0,因此可以添加一个极小的常数来防止分母为零的情况出现。
w
i
=
w
i
−
η
d
w
i
σ
+
S
d
w
i
w_i = w_i - \eta \frac{dw_i}{\sigma + \sqrt{Sdw_i}}
wi=wi−ησ+Sdwidwi 也可以把这个极小的值放到根号里面。
w
i
=
w
i
−
η
d
w
i
σ
+
S
d
w
i
w_i = w_i - \eta \frac{dw_i}{\sqrt{\sigma + Sdw_i}}
wi=wi−ησ+Sdwidwi
根据参数更新公式,
S
d
w
i
Sdw_i
Sdwi 越大,则 w 更新得越慢。在先前所讲的山谷地形中,纵轴方向的梯度要大于横轴方向的梯度,也就是说 db 远大于 dw,
d
b
/
S
d
b
db/\sqrt{Sdb}
db/Sdb 值要小于
d
w
/
S
d
w
dw/\sqrt{Sdw}
dw/Sdw,最终在纵轴方向上更新得较慢,而在横轴上更新得更快。
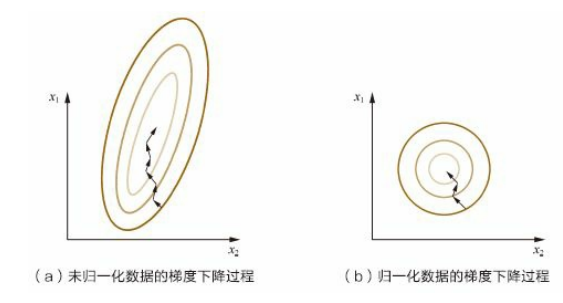
RMSprop 实际上是将椭圆形的等高线转换为圆形的等高线。怎么理解呢?当采用特征归一化将 w 和 b 都转化为 [0, 1] 区间后,此时的图等同于右图。