刚刚优酷里面看到一个用串级ADRC弄无人机的视频
https://v.youku.com/v_show/id_XNDA5MTY5ODQxNg==.html
摘自:https://zhuanlan.zhihu.com/p/115344982
自抗扰控制理论(四)ADRC控制串级系统
Chenglin Li
厦门大学 飞行器设计硕士在读
1 概念
用控制量u驱动其中一个状态变量 ![[公式]](https://img-blog.csdnimg.cn/img_convert/aaa0f162b58058cec2a8c51ff81640d8.png) ,作为虚拟控制量 ,而后用 驱动目标输出 .
,作为虚拟控制量 ,而后用 驱动目标输出 .
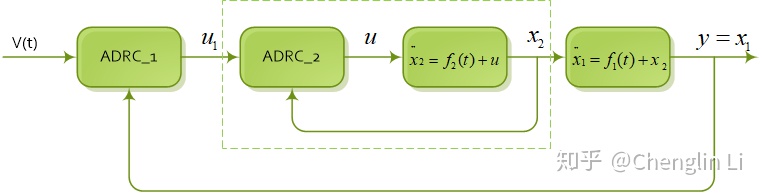
2 串级控制示意图

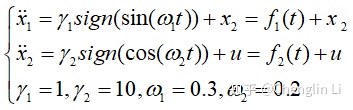
3 给出一个二阶控制对象
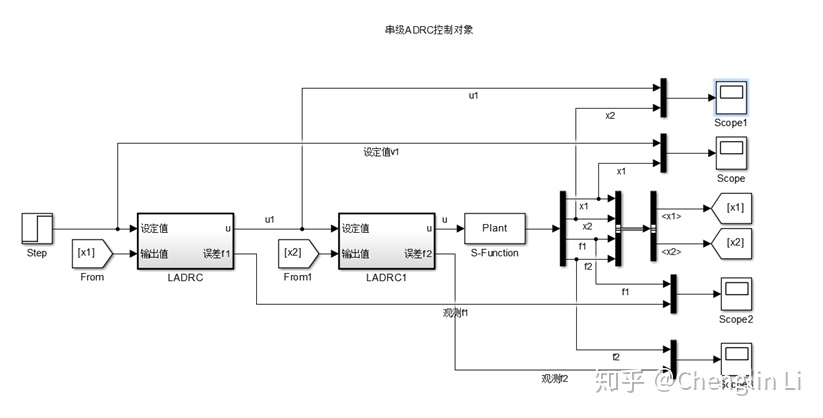
4 控制模型搭建

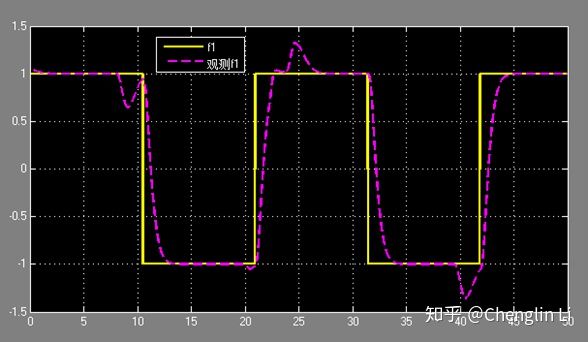
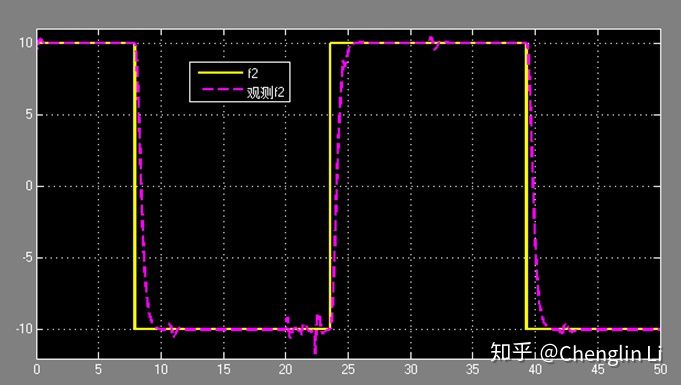
5 扰动观测
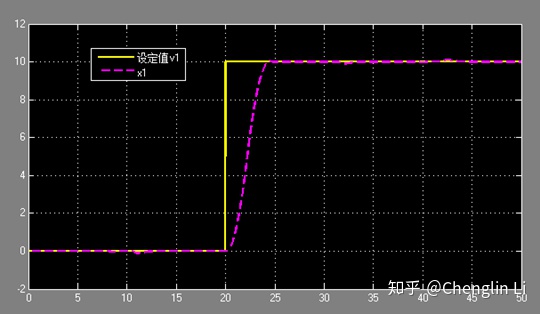
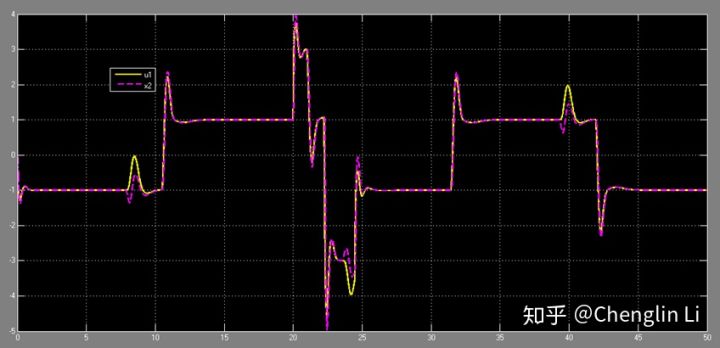
6 跟踪结果
7 相关程序
function sys=mdlDerivatives(t,x,u,b0,b)%状态更新
x11=x(1);
x12=x(2);
x21=x(3);
x22=x(4);
r1=1;
w1=0.3;
r2=10;
w2=0.2;
dx11=x12;
dx12=r1*sign(sin(w1*t))+x21;
dx21=x22;
dx22=r2*sign(cos(w2*t))+u;
sys=[dx11;dx12;dx21;dx22];
%====================================================
function sys=mdlOutputs(t,x,u,b,b0)
sys=[x(1);x(3);
sign(sin(0.3*t));10*sign(cos(0.2*t))];
编辑于 04-02
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)