转载自:https://blog.csdn.net/qq_38288618/article/details/78241456?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.control&dist_request_id=f3cf405d-3f2e-482f-bde8-1770d6e06634&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.control
ARUCO marker的解释
qq_278667286 2017-10-15 16:09:53 6324 收藏 7
分类专栏: 通讯协议 ros
markers for ARUCO
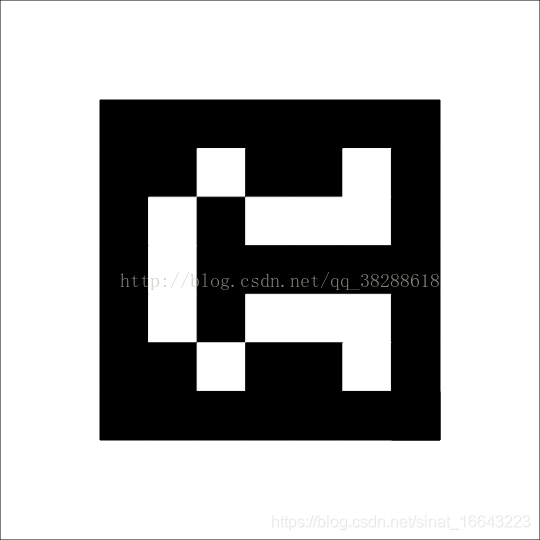
一种汉明(海明)码的格子图
如图
百度百科解释汉明码规则概要:使用奇偶校验,具有一位纠错能力,校验位在2的次幂位置1,2,4,8,16,32...
具体参看:
https://baike.baidu.com/item/%E6%B1%89%E6%98%8E%E7%A0%81/3226749?fr=aladdin
这里主要说我们上面的aruco marker图,它去除边框后是5X5的格子,黑色表示0 白色表示1
遵循这样的排列规则
p d p d p
p d p d p
p d p d p
p d p d p
p d p d p
其中p是校验位(1,3,5列)
d是数据位(2,4列)
数据位一共10位 能表示0-1023的数字
示意图用数字01可表示为下面的排列
0 1 0 0 1
1 0 1 1 1
1 0 0 0 0
1 0 1 1 1
0 1 0 0 1
去除校验位1,3,5列后得到
1 0
0 1
0 0
0 1
1 0
再将数据行行首尾相接
10 01 00 01 10
即得到二进制数 10 0100 0110
512+64+4+2=582;
于是我们得到了刚才示意arucomarker图的markerId是582.
参考
How to create markers for ARUCO?
http://iplimage.com/blog/create-markers-aruco/
————————————————
版权声明:本文为CSDN博主「qq_278667286」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_38288618/article/details/78241456
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)