这就是我Github看到的那个
转载自:https://mp.weixin.qq.com/s/s-MHNBKRPOaxOcwsasBa7Q
【泡泡图灵智库】一种用于快速自主飞行且非常鲁棒的双目视觉惯性里程计方法(ICRA-39)
原创 paopaoslam 泡泡机器人SLAM 2018-09-04
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight
作者:Ke Sun, Kartik Mohta, Bernd Pfrommer, Michael Watterson, Sikang Liu,Yash Mulgaonkar, Camillo J. Taylor, and Vijay Kumar
来源:ICRA2017
播音员:四姑娘
编译:杨小育
审核:皮燕燕
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——一种用于快速自主飞行且非常鲁棒的双目视觉惯性里程计方法,该文章发表于ICRA2017 。
近年来,基于状态估计方法的视觉辅助IMU里程计方法已非常成熟。然而微型飞行器的尺寸和负载能力有限,因而无法使用高精度的传感器和强大的处理器,所以在提升算法的效率和鲁棒性方面就会遇到很多挑战。在本文中,我们提出了一种基于滤波器的双目视觉惯性里程计,它使用多状态约束卡尔曼滤波器(MSCKF)实现。以前的双目视觉里程计方法的计算成本都很高,而我们提出的双目多状态约束卡尔曼滤波器(S-MSCKF)在计算效率方面和现有的单目视觉里程计方法相当,同时又有很高的鲁棒性。为了评估S-MSCKF方法,我们把它和OKVIS,ROVIO,VINS-MONO在EuRoC数据集和自己的数据集上进行了比较。在真实的室内和室外环境中进行实验时,无人机的最大飞行速率达到17.5m/s。S-MSCKF方法的代码可以在https://github.com/KumarRobotics/msckf_vio获得。
主要贡献
1、 提出一种基于滤波器的双目视觉融合IMU里程计,该方法可以在没有GPU加速的情况下运行。
2、 该方法所提出的S-MSCKF比现有的开源VIO解决方案(OKVIS,ROVIO 和VINS-MONO )在准确性,效率和鲁棒性方面有更出色的表现。
算法流程
1、 IMU的状态估计方程为
其中w和a分别为IMU测量的角速度和加速度

2、 用IMU误差估计的线性连续动力学模型为
3、 协方差的增广矩阵为

4、 双目相机的观测方程为
其中, Ci,k Xj, Ci,k Yj , Ci,k Zj , k ∈ {1, 2},为特征点的坐标。
5、 在对当前估计值下对观测方程进行线性化处理,因而残差可以近似为

由于Gpj是由相机的姿态计算出来的,为了保证Gpj的不确定性不影响残差,所以将上式投影到零空间,可得下式

主要结果
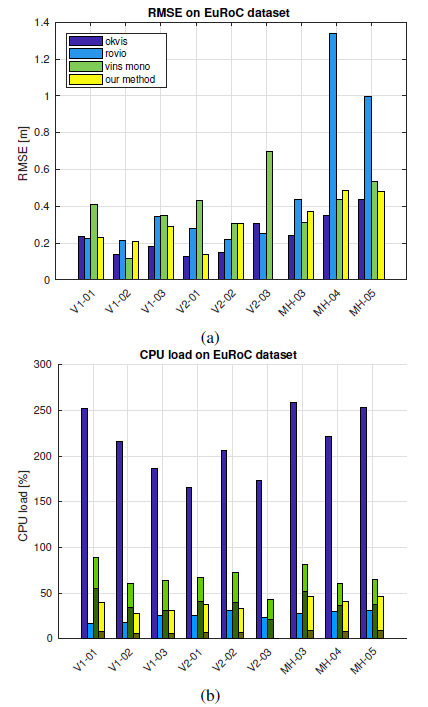
图 1 (a)和(b)分别为OKVIS,ROVIO,VINS-MONO在EuRoC数据集上的均方根误差(RMSE)和平均CPU负载
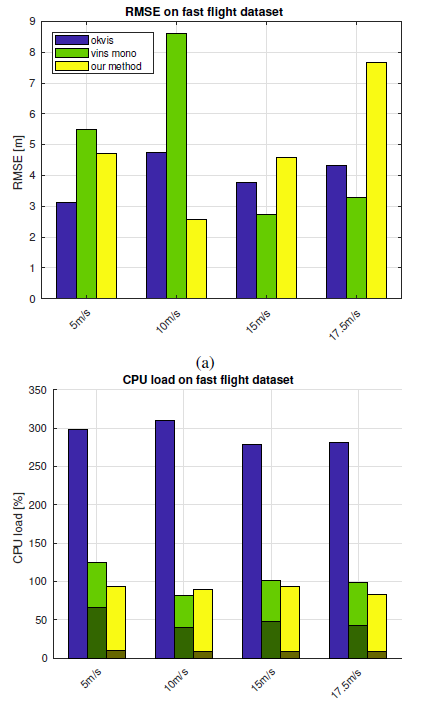
图 2 (a)和(b)分别为OKVIS,ROVIO,VINS-MONO在我们数据集上的均方根误差(RMSE)和平均CPU负载

图 3 全自主飞行实验,蓝色,红色和黄色点分别代表起始点,目标位置和仓库的唯一入口,在超过700米的飞行中,最终的漂移在3米左右,约为0.5%

Abstract
In recent years, vision-aided inertial odometry for state estimation has matured significantly. However, we still encounter challenges in terms of improving the computational efficiency and robustness of the underlying algorithms for ap-plications in autonomous flight with micro aerial vehicles in which it is difficult to use high quality sensors and powerful processors because of constraints on size and weight. In this paper, we present a filter-based stereo visual inertial odometry that uses the Multi-State Constraint Kalman Filter (MSCKF) [1]. Previous work on stereo visual inertial odometry has resulted in solutions that are computationally expensive. We demon-strate that our Stereo Multi-State Constraint Kalman Filter (S-MSCKF) is comparable to state-of-art monocular solutions in terms of computational cost, while providing significantly greater robustness. We evaluate our S-MSCKF algorithm and compare it with state-of-art methods including OKVIS, ROVIO, and VINS-MONO on both the EuRoC dataset, and our own experimental datasets demonstrating fast autonomous flight with maximum speed of 17.5m/s in indoor and outdoor environ-ments. Our implementation of the S-MSCKF is available at https://github.com/KumarRobotics/msckf vio.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)