T265/D435i相机和相机与IMU参数获取
参考这篇博文
https://blog.csdn.net/crp997576280/article/details/109544456

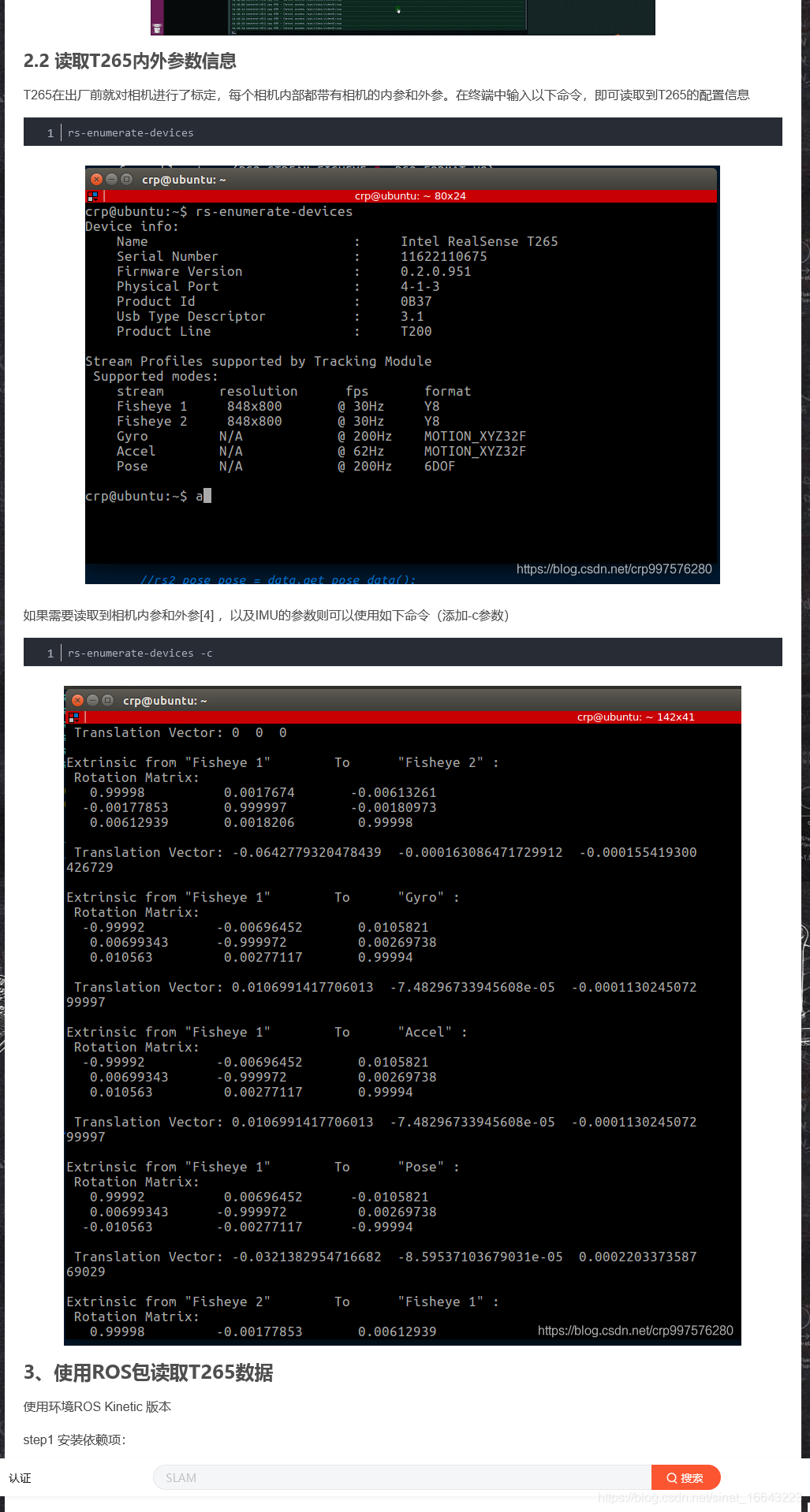
我想我们也需要理解里面的含义,里面有比如 fisheye 1 to fisheye 2 可能就是指两个鱼眼镜头间的旋转矩阵 rotation matric也应该是旋转矩阵的意思。我感觉双目之间的标定,双目和IMU的标定应该就是指两者之间的旋转矩阵吧?应该和单个相机标定出的参数含义不同吧?这么再看上面终端输出的信息是不是清楚了。
https://blog.csdn.net/weixin_43247057/article/details/102501856

https://blog.csdn.net/sinat_16643223/article/details/114711290

这里也说是相机内参,相机到IMU是外参。确实我觉得单个相机的那些畸变参数那是自己的内参,但是相机和相机之前的旋转平移矩阵,相机和IMU之间的旋转平移矩阵,应该是外参。

那如何转化为stereo_imu.yaml里面的形式呢
是两个4*4的矩阵,还是直接搞清楚双目IMU标定得到的参数的真实含义,这样好些。
https://gitee.com/robin_shaun/XTDrone/tree/master/sensing/slam/vio/VINS-Fusion/config/realsense_d435i
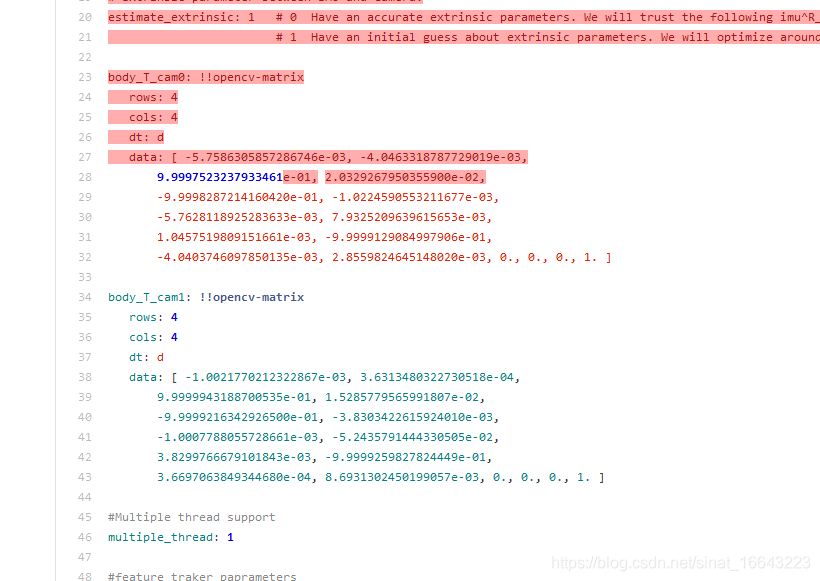
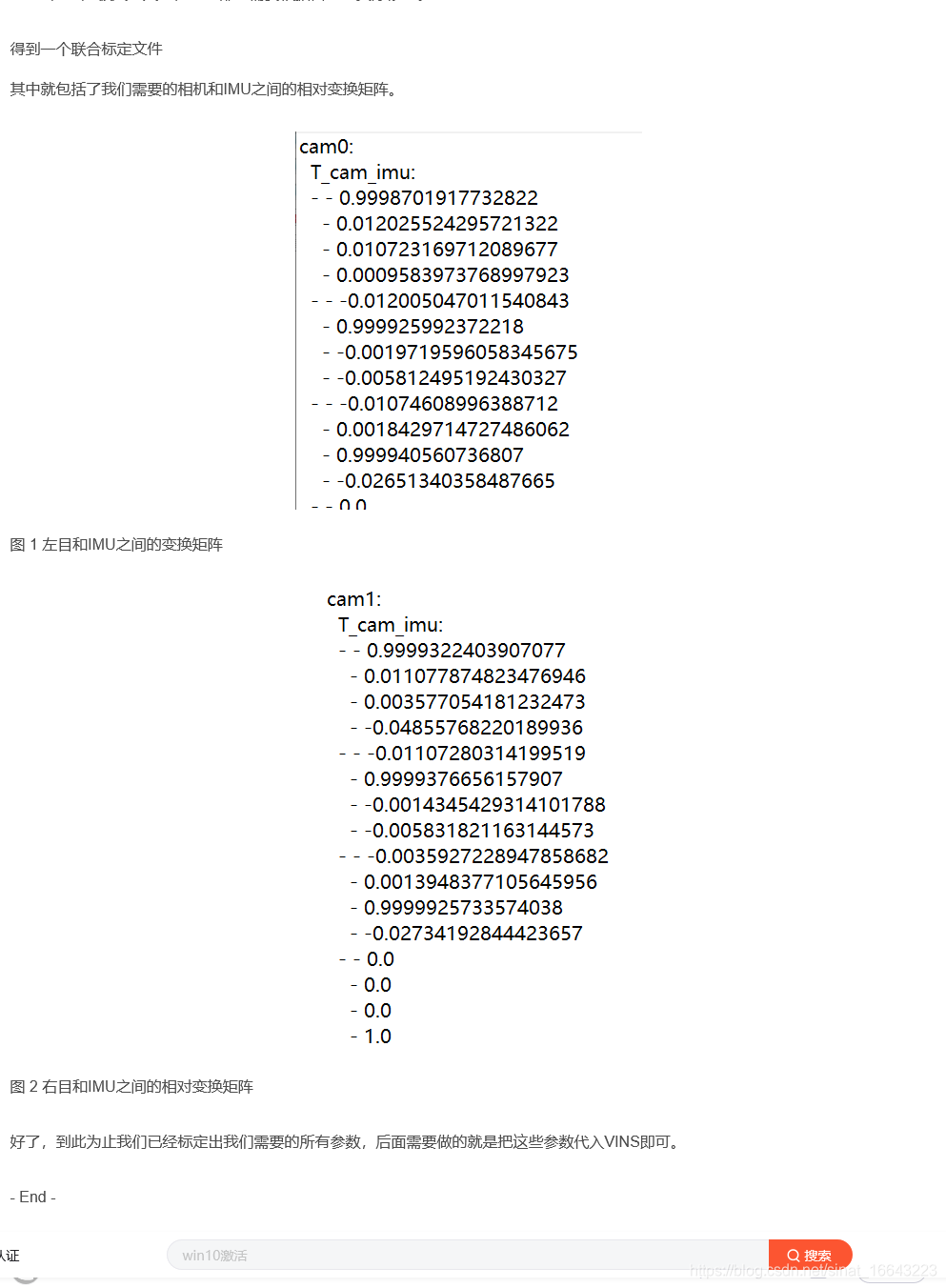
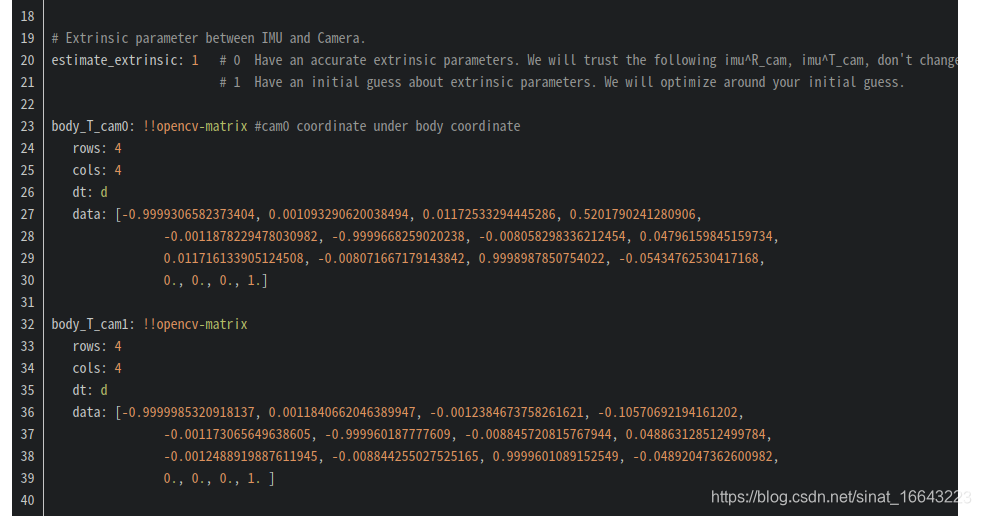
阿木做的IMU和相机的联合标定最后得到的两个矩阵也是这样的形式,一个是左目和IMU的,一个是右目和IMU的。
https://blog.csdn.net/sinat_16643223/article/details/119463003
又有新的重大发现
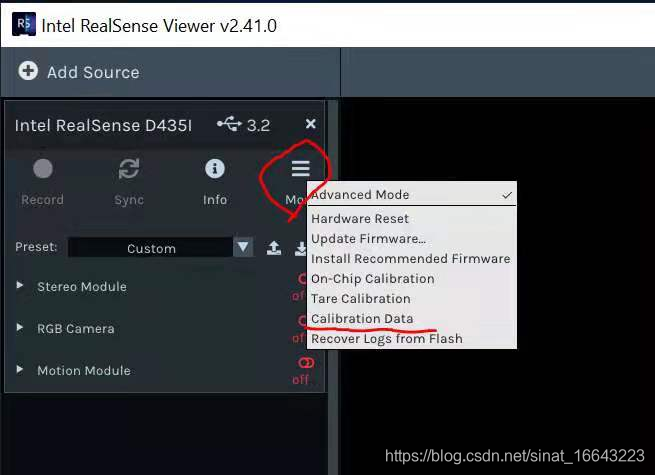

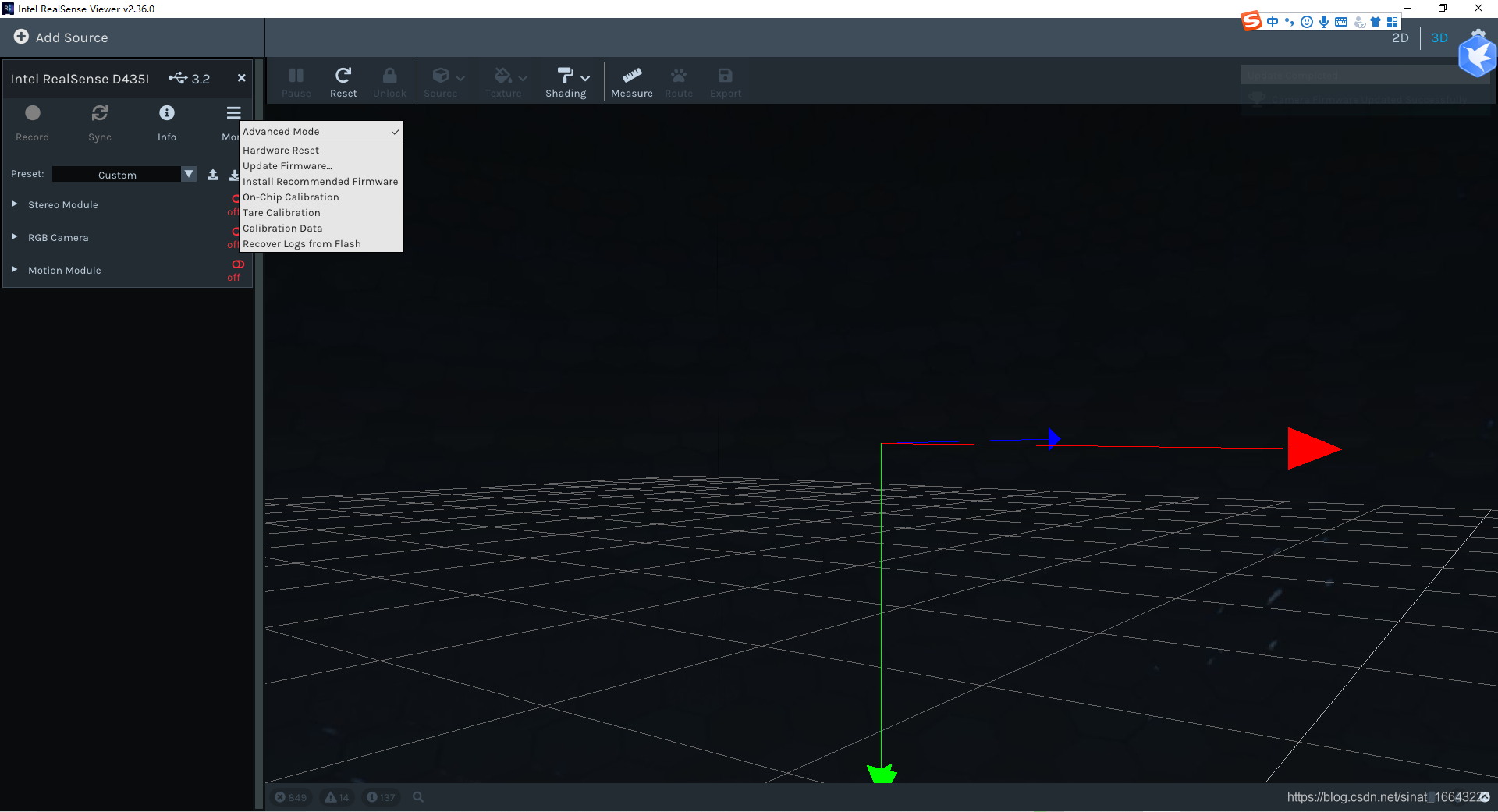
但为什么我这点more只有这种显示呢
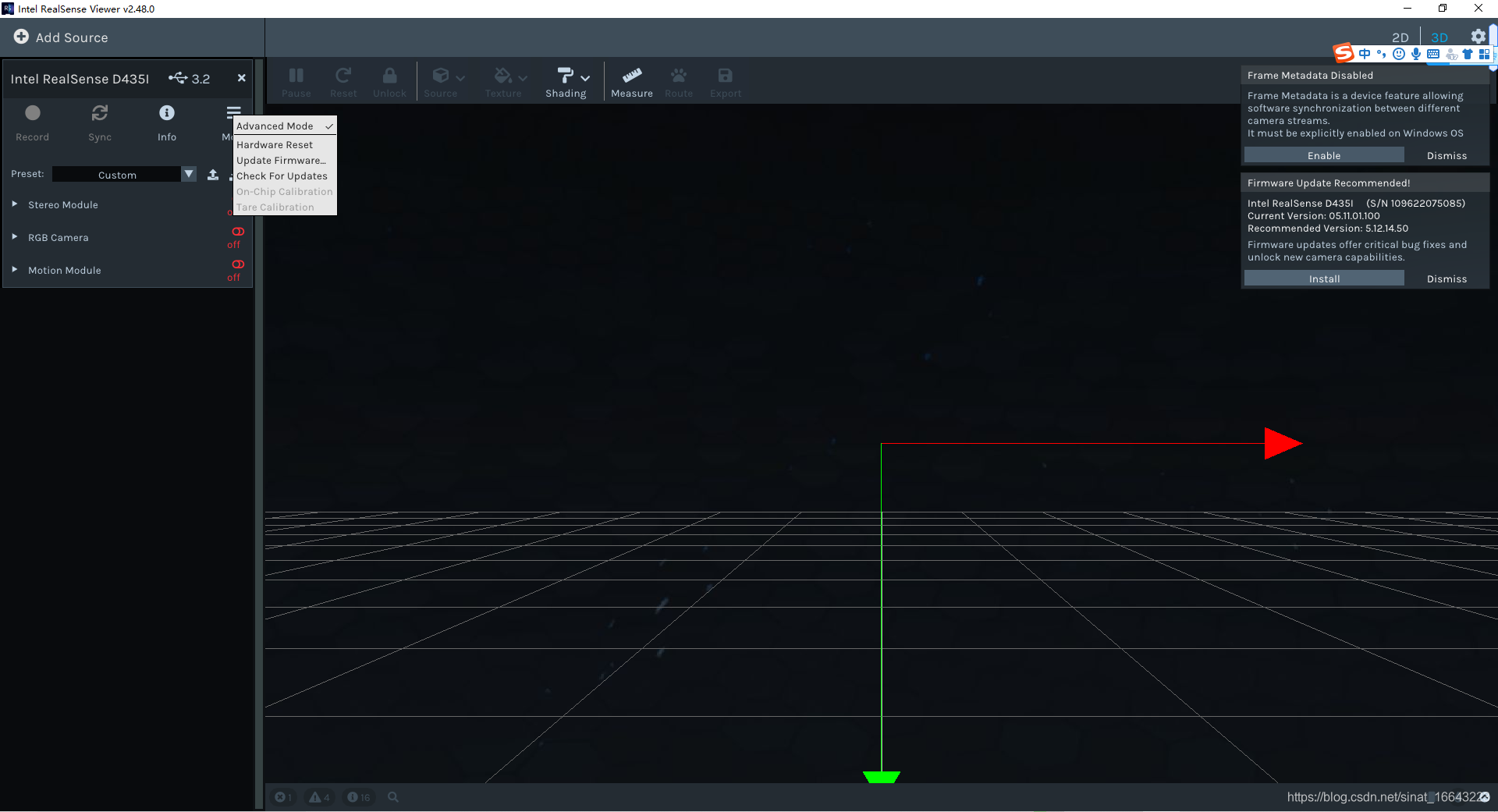

我按照提示它自动给我升级固件后我就可以看了。
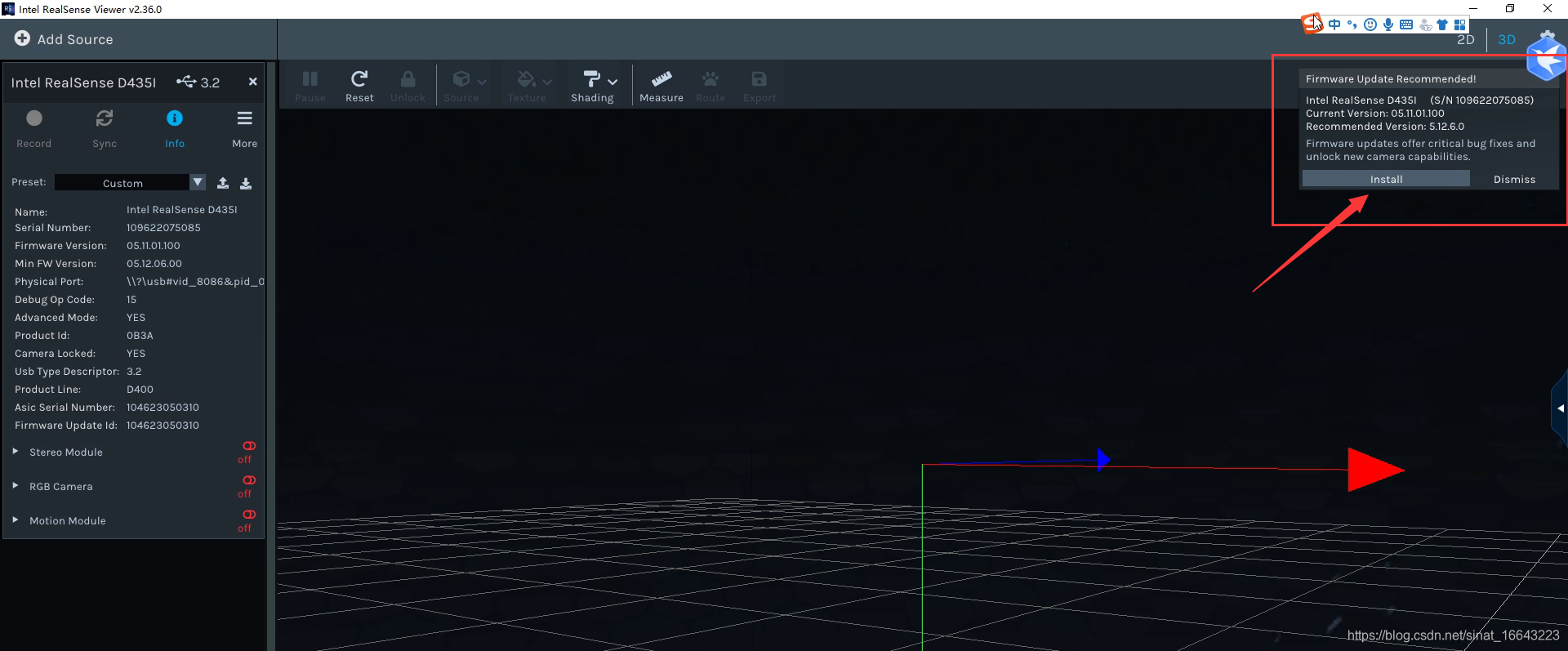
点了右上角提示的Install,它既自动给你下载升级固件了,期间你不需要操作什么(中途可能要点击一个弹出的窗口上的OK),会有进度条显示,速度还可以。 中途会有一阵子realsense-viewer没有识别到D435i,不用管,升级完后会自动识别到的。
有进度调显示
中途会弹出一个这个,点OK即可。
升级完固件它自动重新连上后再点more就可以看到标定参数了。
现在的固件版本是
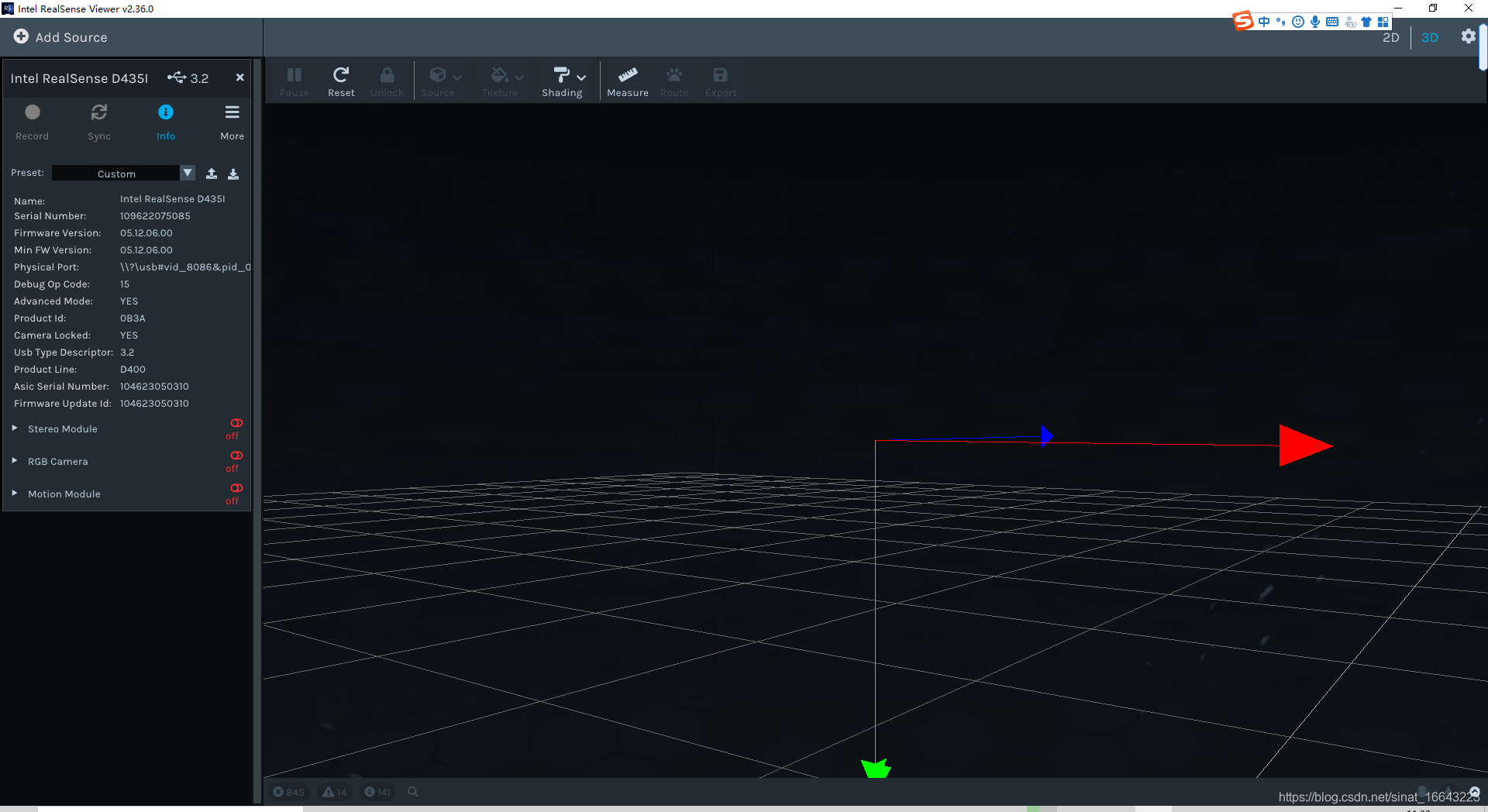
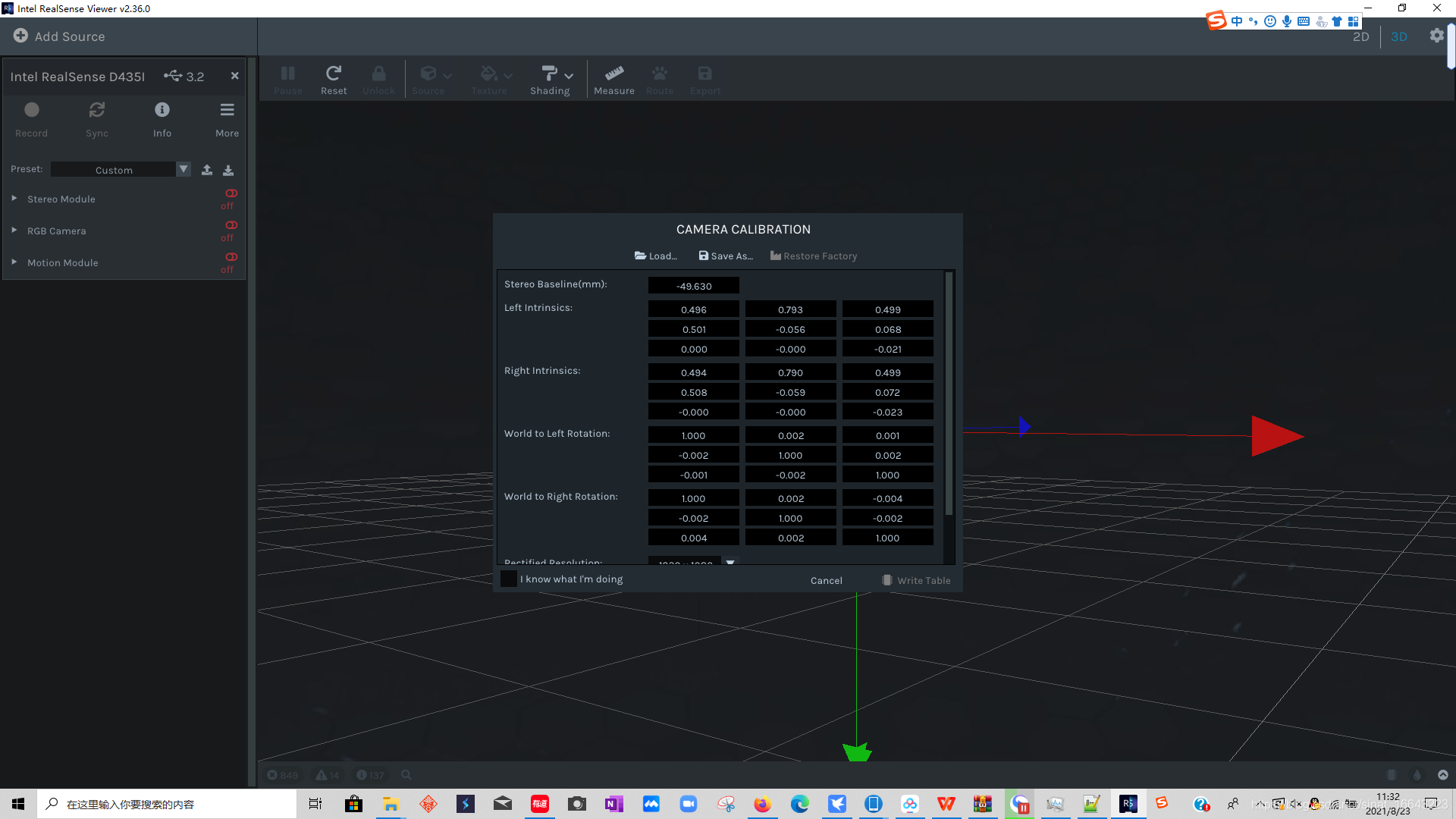
我选择导出,导出的是一个json格式的文件,内容如下

{
"baseline": "-49.6296",
"intrinsic_left.x.x": "0.495791",
"intrinsic_left.x.y": "0.7927",
"intrinsic_left.x.z": "0.498696",
"intrinsic_left.y.x": "0.50141",
"intrinsic_left.y.y": "-0.0561602",
"intrinsic_left.y.z": "0.0678906",
"intrinsic_left.z.x": "0.000170687",
"intrinsic_left.z.y": "-0.000435408",
"intrinsic_left.z.z": "-0.0214294",
"intrinsic_right.x.x": "0.494061",
"intrinsic_right.x.y": "0.789781",
"intrinsic_right.x.z": "0.499182",
"intrinsic_right.y.x": "0.507852",
"intrinsic_right.y.y": "-0.0587788",
"intrinsic_right.y.z": "0.0720991",
"intrinsic_right.z.x": "-3.93086e-05",
"intrinsic_right.z.y": "-0.000202735",
"intrinsic_right.z.z": "-0.0230006",
"rectified.0.fx": "953.567",
"rectified.0.fy": "953.567",
"rectified.0.height": "1080",
"rectified.0.ppx": "955.007",
"rectified.0.ppy": "545.199",
"rectified.0.width": "1920",
"rectified.1.fx": "635.711",
"rectified.1.fy": "635.711",
"rectified.1.height": "720",
"rectified.1.ppx": "636.671",
"rectified.1.ppy": "363.466",
"rectified.1.width": "1280",
"rectified.10.fx": "572.14",
"rectified.10.fy": "572.14",
"rectified.10.height": "0",
"rectified.10.ppx": "357.004",
"rectified.10.ppy": "363.12",
"rectified.10.width": "0",
"rectified.11.fx": "457.712",
"rectified.11.fy": "457.712",
"rectified.11.height": "0",
"rectified.11.ppx": "285.603",
"rectified.11.ppy": "290.496",
"rectified.11.width": "0",
"rectified.12.fx": "0",
"rectified.12.fy": "0",
"rectified.12.height": "400",
"rectified.12.ppx": "0",
"rectified.12.ppy": "0",
"rectified.12.width": "640",
"rectified.13.fx": "0",
"rectified.13.fy": "0",
"rectified.13.height": "576",
"rectified.13.ppx": "0",
"rectified.13.ppy": "0",
"rectified.13.width": "576",
"rectified.14.fx": "0",
"rectified.14.fy": "0",
"rectified.14.height": "720",
"rectified.14.ppx": "0",
"rectified.14.ppy": "0",
"rectified.14.width": "720",
"rectified.15.fx": "0",
"rectified.15.fy": "0",
"rectified.15.height": "1152",
"rectified.15.ppx": "0",
"rectified.15.ppy": "0",
"rectified.15.width": "1152",
"rectified.2.fx": "381.427",
"rectified.2.fy": "381.427",
"rectified.2.height": "480",
"rectified.2.ppx": "318.003",
"rectified.2.ppy": "242.08",
"rectified.2.width": "640",
"rectified.3.fx": "421.159",
"rectified.3.fy": "421.159",
"rectified.3.height": "480",
"rectified.3.ppx": "421.795",
"rectified.3.ppy": "242.296",
"rectified.3.width": "848",
"rectified.4.fx": "317.856",
"rectified.4.fy": "317.856",
"rectified.4.height": "360",
"rectified.4.ppx": "318.336",
"rectified.4.ppy": "181.733",
"rectified.4.width": "640",
"rectified.5.fx": "210.579",
"rectified.5.fy": "210.579",
"rectified.5.height": "240",
"rectified.5.ppx": "210.897",
"rectified.5.ppy": "121.148",
"rectified.5.width": "424",
"rectified.6.fx": "190.713",
"rectified.6.fy": "190.713",
"rectified.6.height": "240",
"rectified.6.ppx": "159.001",
"rectified.6.ppy": "121.04",
"rectified.6.width": "320",
"rectified.7.fx": "238.392",
"rectified.7.fy": "238.392",
"rectified.7.height": "270",
"rectified.7.ppx": "238.752",
"rectified.7.ppy": "136.3",
"rectified.7.width": "480",
"rectified.8.fx": "635.711",
"rectified.8.fy": "635.711",
"rectified.8.height": "800",
"rectified.8.ppx": "636.671",
"rectified.8.ppy": "403.466",
"rectified.8.width": "1280",
"rectified.9.fx": "476.783",
"rectified.9.fy": "476.783",
"rectified.9.height": "540",
"rectified.9.ppx": "477.503",
"rectified.9.ppy": "272.6",
"rectified.9.width": "960",
"world2left_rot.x.x": "0.999997",
"world2left_rot.x.y": "0.00216216",
"world2left_rot.x.z": "0.00103252",
"world2left_rot.y.x": "-0.00216406",
"world2left_rot.y.y": "0.999996",
"world2left_rot.y.z": "0.0018427",
"world2left_rot.z.x": "-0.00102854",
"world2left_rot.z.y": "-0.00184493",
"world2left_rot.z.z": "0.999998",
"world2right_rot.x.x": "0.999992",
"world2right_rot.x.y": "0.00176079",
"world2right_rot.x.z": "-0.00350629",
"world2right_rot.y.x": "-0.00176725",
"world2right_rot.y.y": "0.999997",
"world2right_rot.y.z": "-0.00184072",
"world2right_rot.z.x": "0.00350304",
"world2right_rot.z.y": "0.0018469",
"world2right_rot.z.z": "0.999992"
}
https://github.com/IntelRealSense/librealsense/tree/master/tools/enumerate-devices
这里确实明确说了这个是给标定参数的
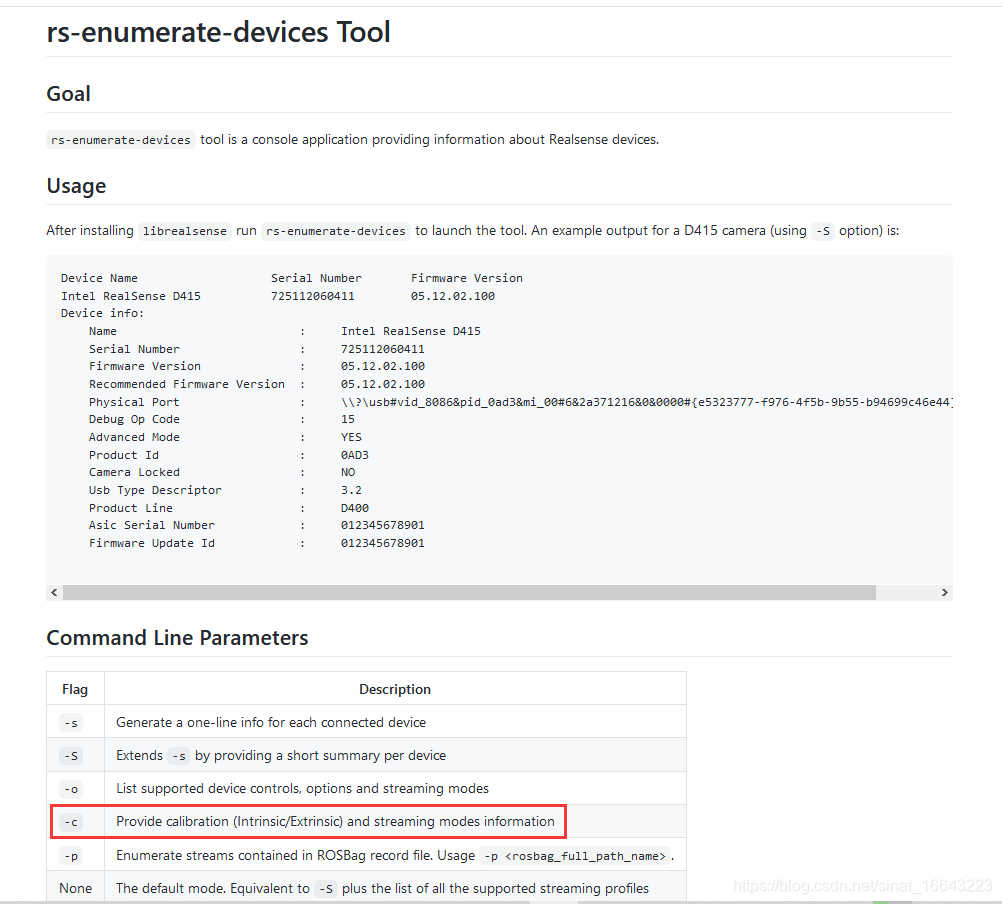
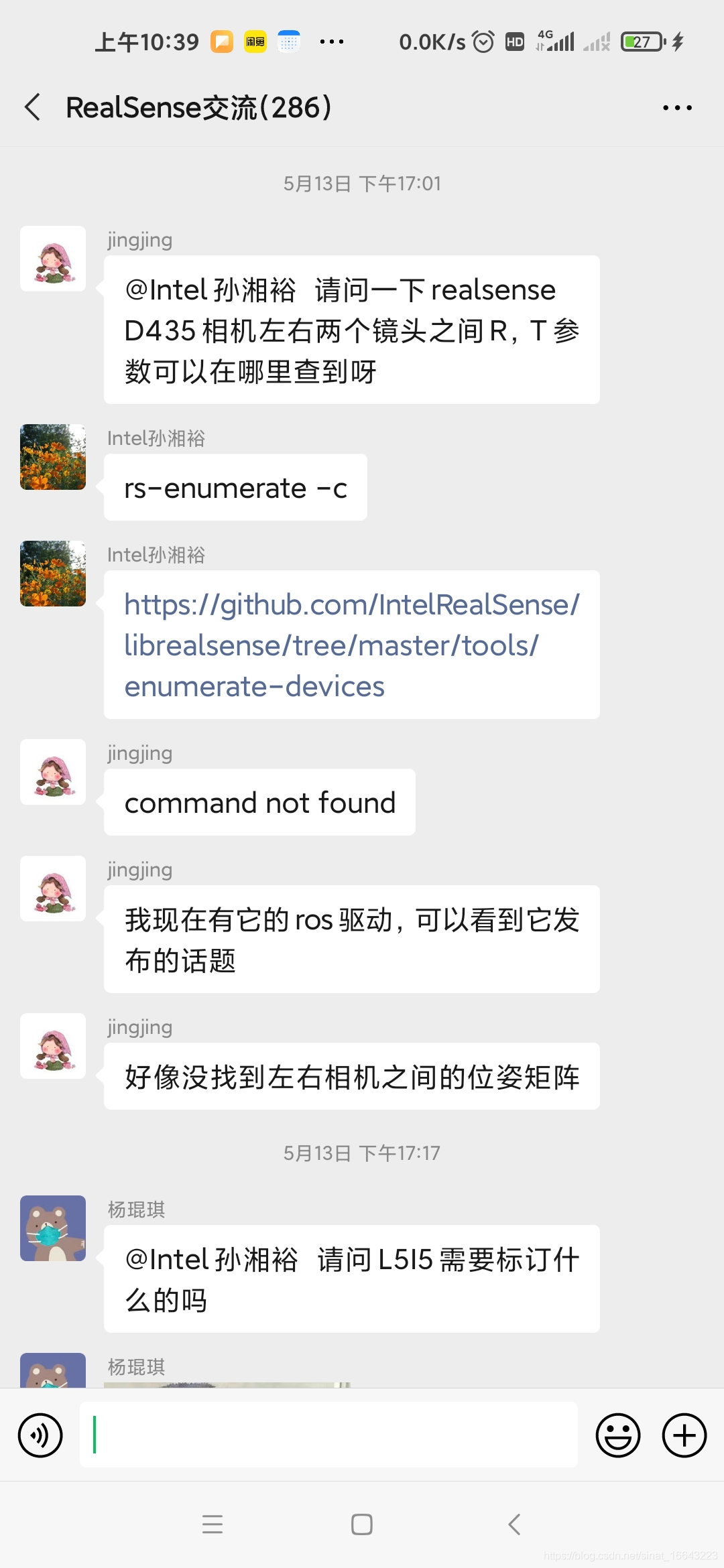
我用rs-enumerate-devices -c 查看我的D435i的标定参数,终端列出的所有参数如下,这比realsense-viewer给出的似乎多多了。
Rotation Matrix 是旋转矩阵
Translation Vector 是平移向量,所以只有三个数字,表示平移x y z就够了嘛。
maxi@maxi:~$ rs-enumerate-devices -c
Device info:
Name : Intel RealSense D435I
Serial Number : 109622075085
Firmware Version : 05.12.06.00
Recommended Firmware Version : 05.12.08.200
Physical Port : /sys/devices/pci0000:00/0000:00:14.0/usb2/2-3/2-3:1.0/video4linux/video2
Debug Op Code : 15
Advanced Mode : YES
Product Id : 0B3A
Camera Locked : YES
Usb Type Descriptor : 3.2
Product Line : D400
Asic Serial Number : 104623050310
Firmware Update Id : 104623050310
Stream Profiles supported by Stereo Module
Supported modes:
stream resolution fps format
Infrared 1 1280x800 @ 30Hz Y8
Infrared 1 1280x800 @ 25Hz Y16
Infrared 1 1280x800 @ 15Hz Y16
Infrared 1 1280x800 @ 15Hz Y8
Infrared 1 1280x720 @ 30Hz Y8
Infrared 1 1280x720 @ 15Hz Y8
Infrared 1 1280x720 @ 6Hz Y8
Infrared 1 848x480 @ 90Hz Y8
Infrared 1 848x480 @ 60Hz Y8
Infrared 1 848x480 @ 30Hz Y8
Infrared 1 848x480 @ 15Hz Y8
Infrared 1 848x480 @ 6Hz Y8
Infrared 1 848x100 @ 300Hz Y8
Infrared 1 848x100 @ 100Hz Y8
Infrared 1 640x480 @ 90Hz Y8
Infrared 1 640x480 @ 60Hz Y8
Infrared 1 640x480 @ 30Hz Y8
Infrared 1 640x480 @ 15Hz Y8
Infrared 1 640x480 @ 6Hz Y8
Infrared 1 640x400 @ 25Hz Y16
Infrared 1 640x400 @ 15Hz Y16
Infrared 1 640x360 @ 90Hz Y8
Infrared 1 640x360 @ 60Hz Y8
Infrared 1 640x360 @ 30Hz Y8
Infrared 1 640x360 @ 15Hz Y8
Infrared 1 640x360 @ 6Hz Y8
Infrared 1 480x270 @ 90Hz Y8
Infrared 1 480x270 @ 60Hz Y8
Infrared 1 480x270 @ 30Hz Y8
Infrared 1 480x270 @ 15Hz Y8
Infrared 1 480x270 @ 6Hz Y8
Infrared 1 424x240 @ 90Hz Y8
Infrared 1 424x240 @ 60Hz Y8
Infrared 1 424x240 @ 30Hz Y8
Infrared 1 424x240 @ 15Hz Y8
Infrared 1 424x240 @ 6Hz Y8
Infrared 1 256x144 @ 300Hz Y8
Infrared 1 256x144 @ 90Hz Y8
Infrared 2 1280x800 @ 30Hz Y8
Infrared 2 1280x800 @ 25Hz Y16
Infrared 2 1280x800 @ 15Hz Y16
Infrared 2 1280x800 @ 15Hz Y8
Infrared 2 1280x720 @ 30Hz Y8
Infrared 2 1280x720 @ 15Hz Y8
Infrared 2 1280x720 @ 6Hz Y8
Infrared 2 848x480 @ 90Hz Y8
Infrared 2 848x480 @ 60Hz Y8
Infrared 2 848x480 @ 30Hz Y8
Infrared 2 848x480 @ 15Hz Y8
Infrared 2 848x480 @ 6Hz Y8
Infrared 2 848x100 @ 300Hz Y8
Infrared 2 848x100 @ 100Hz Y8
Infrared 2 640x480 @ 90Hz Y8
Infrared 2 640x480 @ 60Hz Y8
Infrared 2 640x480 @ 30Hz Y8
Infrared 2 640x480 @ 15Hz Y8
Infrared 2 640x480 @ 6Hz Y8
Infrared 2 640x400 @ 25Hz Y16
Infrared 2 640x400 @ 15Hz Y16
Infrared 2 640x360 @ 90Hz Y8
Infrared 2 640x360 @ 60Hz Y8
Infrared 2 640x360 @ 30Hz Y8
Infrared 2 640x360 @ 15Hz Y8
Infrared 2 640x360 @ 6Hz Y8
Infrared 2 480x270 @ 90Hz Y8
Infrared 2 480x270 @ 60Hz Y8
Infrared 2 480x270 @ 30Hz Y8
Infrared 2 480x270 @ 15Hz Y8
Infrared 2 480x270 @ 6Hz Y8
Infrared 2 424x240 @ 90Hz Y8
Infrared 2 424x240 @ 60Hz Y8
Infrared 2 424x240 @ 30Hz Y8
Infrared 2 424x240 @ 15Hz Y8
Infrared 2 424x240 @ 6Hz Y8
Infrared 2 256x144 @ 300Hz Y8
Infrared 2 256x144 @ 90Hz Y8
Depth 1280x720 @ 30Hz Z16
Depth 1280x720 @ 15Hz Z16
Depth 1280x720 @ 6Hz Z16
Depth 848x480 @ 90Hz Z16
Depth 848x480 @ 60Hz Z16
Depth 848x480 @ 30Hz Z16
Depth 848x480 @ 15Hz Z16
Depth 848x480 @ 6Hz Z16
Depth 848x100 @ 300Hz Z16
Depth 848x100 @ 100Hz Z16
Depth 640x480 @ 90Hz Z16
Depth 640x480 @ 60Hz Z16
Depth 640x480 @ 30Hz Z16
Depth 640x480 @ 15Hz Z16
Depth 640x480 @ 6Hz Z16
Depth 640x360 @ 90Hz Z16
Depth 640x360 @ 60Hz Z16
Depth 640x360 @ 30Hz Z16
Depth 640x360 @ 15Hz Z16
Depth 640x360 @ 6Hz Z16
Depth 480x270 @ 90Hz Z16
Depth 480x270 @ 60Hz Z16
Depth 480x270 @ 30Hz Z16
Depth 480x270 @ 15Hz Z16
Depth 480x270 @ 6Hz Z16
Depth 424x240 @ 90Hz Z16
Depth 424x240 @ 60Hz Z16
Depth 424x240 @ 30Hz Z16
Depth 424x240 @ 15Hz Z16
Depth 424x240 @ 6Hz Z16
Depth 256x144 @ 300Hz Z16
Depth 256x144 @ 90Hz Z16
Stream Profiles supported by RGB Camera
Supported modes:
stream resolution fps format
Color 1920x1080 @ 30Hz RGB8
Color 1920x1080 @ 30Hz Y16
Color 1920x1080 @ 30Hz BGRA8
Color 1920x1080 @ 30Hz RGBA8
Color 1920x1080 @ 30Hz BGR8
Color 1920x1080 @ 30Hz YUYV
Color 1920x1080 @ 15Hz RGB8
Color 1920x1080 @ 15Hz Y16
Color 1920x1080 @ 15Hz BGRA8
Color 1920x1080 @ 15Hz RGBA8
Color 1920x1080 @ 15Hz BGR8
Color 1920x1080 @ 15Hz YUYV
Color 1920x1080 @ 6Hz RGB8
Color 1920x1080 @ 6Hz Y16
Color 1920x1080 @ 6Hz BGRA8
Color 1920x1080 @ 6Hz RGBA8
Color 1920x1080 @ 6Hz BGR8
Color 1920x1080 @ 6Hz YUYV
Color 1280x720 @ 30Hz RGB8
Color 1280x720 @ 30Hz Y16
Color 1280x720 @ 30Hz BGRA8
Color 1280x720 @ 30Hz RGBA8
Color 1280x720 @ 30Hz BGR8
Color 1280x720 @ 30Hz YUYV
Color 1280x720 @ 15Hz RGB8
Color 1280x720 @ 15Hz Y16
Color 1280x720 @ 15Hz BGRA8
Color 1280x720 @ 15Hz RGBA8
Color 1280x720 @ 15Hz BGR8
Color 1280x720 @ 15Hz YUYV
Color 1280x720 @ 6Hz RGB8
Color 1280x720 @ 6Hz Y16
Color 1280x720 @ 6Hz BGRA8
Color 1280x720 @ 6Hz RGBA8
Color 1280x720 @ 6Hz BGR8
Color 1280x720 @ 6Hz YUYV
Color 960x540 @ 60Hz RGB8
Color 960x540 @ 60Hz Y16
Color 960x540 @ 60Hz BGRA8
Color 960x540 @ 60Hz RGBA8
Color 960x540 @ 60Hz BGR8
Color 960x540 @ 60Hz YUYV
Color 960x540 @ 30Hz RGB8
Color 960x540 @ 30Hz Y16
Color 960x540 @ 30Hz BGRA8
Color 960x540 @ 30Hz RGBA8
Color 960x540 @ 30Hz BGR8
Color 960x540 @ 30Hz YUYV
Color 960x540 @ 15Hz RGB8
Color 960x540 @ 15Hz Y16
Color 960x540 @ 15Hz BGRA8
Color 960x540 @ 15Hz RGBA8
Color 960x540 @ 15Hz BGR8
Color 960x540 @ 15Hz YUYV
Color 960x540 @ 6Hz RGB8
Color 960x540 @ 6Hz Y16
Color 960x540 @ 6Hz BGRA8
Color 960x540 @ 6Hz RGBA8
Color 960x540 @ 6Hz BGR8
Color 960x540 @ 6Hz YUYV
Color 848x480 @ 60Hz RGB8
Color 848x480 @ 60Hz Y16
Color 848x480 @ 60Hz BGRA8
Color 848x480 @ 60Hz RGBA8
Color 848x480 @ 60Hz BGR8
Color 848x480 @ 60Hz YUYV
Color 848x480 @ 30Hz RGB8
Color 848x480 @ 30Hz Y16
Color 848x480 @ 30Hz BGRA8
Color 848x480 @ 30Hz RGBA8
Color 848x480 @ 30Hz BGR8
Color 848x480 @ 30Hz YUYV
Color 848x480 @ 15Hz RGB8
Color 848x480 @ 15Hz Y16
Color 848x480 @ 15Hz BGRA8
Color 848x480 @ 15Hz RGBA8
Color 848x480 @ 15Hz BGR8
Color 848x480 @ 15Hz YUYV
Color 848x480 @ 6Hz RGB8
Color 848x480 @ 6Hz Y16
Color 848x480 @ 6Hz BGRA8
Color 848x480 @ 6Hz RGBA8
Color 848x480 @ 6Hz BGR8
Color 848x480 @ 6Hz YUYV
Color 640x480 @ 60Hz RGB8
Color 640x480 @ 60Hz Y16
Color 640x480 @ 60Hz BGRA8
Color 640x480 @ 60Hz RGBA8
Color 640x480 @ 60Hz BGR8
Color 640x480 @ 60Hz YUYV
Color 640x480 @ 30Hz RGB8
Color 640x480 @ 30Hz Y16
Color 640x480 @ 30Hz BGRA8
Color 640x480 @ 30Hz RGBA8
Color 640x480 @ 30Hz BGR8
Color 640x480 @ 30Hz YUYV
Color 640x480 @ 15Hz RGB8
Color 640x480 @ 15Hz Y16
Color 640x480 @ 15Hz BGRA8
Color 640x480 @ 15Hz RGBA8
Color 640x480 @ 15Hz BGR8
Color 640x480 @ 15Hz YUYV
Color 640x480 @ 6Hz RGB8
Color 640x480 @ 6Hz Y16
Color 640x480 @ 6Hz BGRA8
Color 640x480 @ 6Hz RGBA8
Color 640x480 @ 6Hz BGR8
Color 640x480 @ 6Hz YUYV
Color 640x360 @ 60Hz RGB8
Color 640x360 @ 60Hz Y16
Color 640x360 @ 60Hz BGRA8
Color 640x360 @ 60Hz RGBA8
Color 640x360 @ 60Hz BGR8
Color 640x360 @ 60Hz YUYV
Color 640x360 @ 30Hz RGB8
Color 640x360 @ 30Hz Y16
Color 640x360 @ 30Hz BGRA8
Color 640x360 @ 30Hz RGBA8
Color 640x360 @ 30Hz BGR8
Color 640x360 @ 30Hz YUYV
Color 640x360 @ 15Hz RGB8
Color 640x360 @ 15Hz Y16
Color 640x360 @ 15Hz BGRA8
Color 640x360 @ 15Hz RGBA8
Color 640x360 @ 15Hz BGR8
Color 640x360 @ 15Hz YUYV
Color 640x360 @ 6Hz RGB8
Color 640x360 @ 6Hz Y16
Color 640x360 @ 6Hz BGRA8
Color 640x360 @ 6Hz RGBA8
Color 640x360 @ 6Hz BGR8
Color 640x360 @ 6Hz YUYV
Color 424x240 @ 60Hz RGB8
Color 424x240 @ 60Hz Y16
Color 424x240 @ 60Hz BGRA8
Color 424x240 @ 60Hz RGBA8
Color 424x240 @ 60Hz BGR8
Color 424x240 @ 60Hz YUYV
Color 424x240 @ 30Hz RGB8
Color 424x240 @ 30Hz Y16
Color 424x240 @ 30Hz BGRA8
Color 424x240 @ 30Hz RGBA8
Color 424x240 @ 30Hz BGR8
Color 424x240 @ 30Hz YUYV
Color 424x240 @ 15Hz RGB8
Color 424x240 @ 15Hz Y16
Color 424x240 @ 15Hz BGRA8
Color 424x240 @ 15Hz RGBA8
Color 424x240 @ 15Hz BGR8
Color 424x240 @ 15Hz YUYV
Color 424x240 @ 6Hz RGB8
Color 424x240 @ 6Hz Y16
Color 424x240 @ 6Hz BGRA8
Color 424x240 @ 6Hz RGBA8
Color 424x240 @ 6Hz BGR8
Color 424x240 @ 6Hz YUYV
Color 320x240 @ 60Hz RGB8
Color 320x240 @ 60Hz Y16
Color 320x240 @ 60Hz BGRA8
Color 320x240 @ 60Hz RGBA8
Color 320x240 @ 60Hz BGR8
Color 320x240 @ 60Hz YUYV
Color 320x240 @ 30Hz RGB8
Color 320x240 @ 30Hz Y16
Color 320x240 @ 30Hz BGRA8
Color 320x240 @ 30Hz RGBA8
Color 320x240 @ 30Hz BGR8
Color 320x240 @ 30Hz YUYV
Color 320x240 @ 6Hz RGB8
Color 320x240 @ 6Hz Y16
Color 320x240 @ 6Hz BGRA8
Color 320x240 @ 6Hz RGBA8
Color 320x240 @ 6Hz BGR8
Color 320x240 @ 6Hz YUYV
Color 320x180 @ 60Hz RGB8
Color 320x180 @ 60Hz Y16
Color 320x180 @ 60Hz BGRA8
Color 320x180 @ 60Hz RGBA8
Color 320x180 @ 60Hz BGR8
Color 320x180 @ 60Hz YUYV
Color 320x180 @ 30Hz RGB8
Color 320x180 @ 30Hz Y16
Color 320x180 @ 30Hz BGRA8
Color 320x180 @ 30Hz RGBA8
Color 320x180 @ 30Hz BGR8
Color 320x180 @ 30Hz YUYV
Color 320x180 @ 6Hz RGB8
Color 320x180 @ 6Hz Y16
Color 320x180 @ 6Hz BGRA8
Color 320x180 @ 6Hz RGBA8
Color 320x180 @ 6Hz BGR8
Color 320x180 @ 6Hz YUYV
Stream Profiles supported by Motion Module
Supported modes:
stream resolution fps format
Accel N/A @ 250Hz MOTION_XYZ32F
Accel N/A @ 63Hz MOTION_XYZ32F
Gyro N/A @ 400Hz MOTION_XYZ32F
Gyro N/A @ 200Hz MOTION_XYZ32F
Intrinsic Parameters:
Intrinsic of "Depth" / 256x144 / {Z16}
Width: 256
Height: 144
PPX: 124.671081542969
PPY: 75.4661865234375
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.77 x 12.92
Intrinsic of "Depth" / 424x240 / {Z16}
Width: 424
Height: 240
PPX: 210.89729309082
PPY: 121.148178100586
Fx: 210.579345703125
Fy: 210.579345703125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.39 x 59.35
Intrinsic of "Depth" / 480x270 / {Z16}
Width: 480
Height: 270
PPX: 238.751647949219
PPY: 136.299819946289
Fx: 238.391723632812
Fy: 238.391723632812
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Depth" / 640x360 / {Z16}
Width: 640
Height: 360
PPX: 318.335540771484
PPY: 181.733093261719
Fx: 317.855621337891
Fy: 317.855621337891
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Depth" / 640x480 / {Z16}
Width: 640
Height: 480
PPX: 318.002655029297
PPY: 242.079711914062
Fx: 381.4267578125
Fy: 381.4267578125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.99 x 64.36
Intrinsic of "Depth" / 848x100 / {Z16}
Width: 848
Height: 100
PPX: 421.794586181641
PPY: 52.2963562011719
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 13.54
Intrinsic of "Depth" / 848x480 / {Z16}
Width: 848
Height: 480
PPX: 421.794586181641
PPY: 242.296356201172
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.35
Intrinsic of "Depth" / 1280x720 / {Z16}
Width: 1280
Height: 720
PPX: 636.671081542969
PPY: 363.466186523438
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Color" / 320x180 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 320
Height: 180
PPX: 161.122665405273
PPY: 86.5624389648438
Fx: 227.984909057617
Fy: 227.9404296875
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 70.12 x 43.09
Intrinsic of "Color" / 320x240 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 320
Height: 240
PPX: 161.496887207031
PPY: 115.416580200195
Fx: 303.979858398438
Fy: 303.920562744141
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 55.52 x 43.09
Intrinsic of "Color" / 424x240 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 424
Height: 240
PPX: 213.496887207031
PPY: 115.416580200195
Fx: 303.979858398438
Fy: 303.920562744141
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.78 x 43.09
Intrinsic of "Color" / 640x360 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 640
Height: 360
PPX: 322.245330810547
PPY: 173.124877929688
Fx: 455.969818115234
Fy: 455.880859375
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 70.12 x 43.09
Intrinsic of "Color" / 640x480 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 640
Height: 480
PPX: 322.993774414062
PPY: 230.833160400391
Fx: 607.959716796875
Fy: 607.841125488281
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 55.52 x 43.09
Intrinsic of "Color" / 848x480 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 848
Height: 480
PPX: 426.993774414062
PPY: 230.833160400391
Fx: 607.959716796875
Fy: 607.841125488281
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 69.78 x 43.09
Intrinsic of "Color" / 960x540 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 960
Height: 540
PPX: 483.367980957031
PPY: 259.687316894531
Fx: 683.954711914062
Fy: 683.8212890625
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 70.12 x 43.09
Intrinsic of "Color" / 1280x720 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 1280
Height: 720
PPX: 644.490661621094
PPY: 346.249755859375
Fx: 911.939636230469
Fy: 911.76171875
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 70.12 x 43.09
Intrinsic of "Color" / 1920x1080 / {YUYV/RGB8/BGR8/RGBA8/BGRA8/Y16}
Width: 1920
Height: 1080
PPX: 966.735961914062
PPY: 519.374633789062
Fx: 1367.90942382812
Fy: 1367.642578125
Distortion: Inverse Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 70.12 x 43.08
Intrinsic of "Infrared 1" / 256x144 / {Y8}
Width: 256
Height: 144
PPX: 124.671081542969
PPY: 75.4661865234375
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.77 x 12.92
Intrinsic of "Infrared 1" / 424x240 / {Y8}
Width: 424
Height: 240
PPX: 210.89729309082
PPY: 121.148178100586
Fx: 210.579345703125
Fy: 210.579345703125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.39 x 59.35
Intrinsic of "Infrared 1" / 480x270 / {Y8}
Width: 480
Height: 270
PPX: 238.751647949219
PPY: 136.299819946289
Fx: 238.391723632812
Fy: 238.391723632812
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 1" / 640x360 / {Y8}
Width: 640
Height: 360
PPX: 318.335540771484
PPY: 181.733093261719
Fx: 317.855621337891
Fy: 317.855621337891
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 1" / 640x480 / {Y8}
Width: 640
Height: 480
PPX: 318.002655029297
PPY: 242.079711914062
Fx: 381.4267578125
Fy: 381.4267578125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.99 x 64.36
Intrinsic of "Infrared 1" / 848x100 / {Y8}
Width: 848
Height: 100
PPX: 421.794586181641
PPY: 52.2963562011719
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 13.54
Intrinsic of "Infrared 1" / 848x480 / {Y8}
Width: 848
Height: 480
PPX: 421.794586181641
PPY: 242.296356201172
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.35
Intrinsic of "Infrared 1" / 1280x720 / {Y8}
Width: 1280
Height: 720
PPX: 636.671081542969
PPY: 363.466186523438
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 1" / 1280x800 / {Y8}
Width: 1280
Height: 800
PPX: 636.671081542969
PPY: 403.466186523438
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 64.36
Intrinsic of "Infrared 2" / 256x144 / {Y8}
Width: 256
Height: 144
PPX: 124.671081542969
PPY: 75.4661865234375
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 22.77 x 12.92
Intrinsic of "Infrared 2" / 424x240 / {Y8}
Width: 424
Height: 240
PPX: 210.89729309082
PPY: 121.148178100586
Fx: 210.579345703125
Fy: 210.579345703125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.39 x 59.35
Intrinsic of "Infrared 2" / 480x270 / {Y8}
Width: 480
Height: 270
PPX: 238.751647949219
PPY: 136.299819946289
Fx: 238.391723632812
Fy: 238.391723632812
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 2" / 640x360 / {Y8}
Width: 640
Height: 360
PPX: 318.335540771484
PPY: 181.733093261719
Fx: 317.855621337891
Fy: 317.855621337891
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 2" / 640x480 / {Y8}
Width: 640
Height: 480
PPX: 318.002655029297
PPY: 242.079711914062
Fx: 381.4267578125
Fy: 381.4267578125
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 79.99 x 64.36
Intrinsic of "Infrared 2" / 848x100 / {Y8}
Width: 848
Height: 100
PPX: 421.794586181641
PPY: 52.2963562011719
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 13.54
Intrinsic of "Infrared 2" / 848x480 / {Y8}
Width: 848
Height: 480
PPX: 421.794586181641
PPY: 242.296356201172
Fx: 421.15869140625
Fy: 421.15869140625
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.35
Intrinsic of "Infrared 2" / 1280x720 / {Y8}
Width: 1280
Height: 720
PPX: 636.671081542969
PPY: 363.466186523438
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 59.04
Intrinsic of "Infrared 2" / 1280x800 / {Y8}
Width: 1280
Height: 800
PPX: 636.671081542969
PPY: 403.466186523438
Fx: 635.711242675781
Fy: 635.711242675781
Distortion: Brown Conrady
Coeffs: 0 0 0 0 0
FOV (deg): 90.38 x 64.36
Motion Intrinsic Parameters:
Motion Intrinsic of "Gyro" MOTION_XYZ32F
Bias Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Noise Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Sensitivity :
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
Motion Intrinsic of "Accel" MOTION_XYZ32F
Bias Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Noise Variances: 0.000000000000000 0.000000000000000 0.000000000000000
Sensitivity :
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
Extrinsic Parameters:
Extrinsic from "Depth" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Color" :
Rotation Matrix:
0.999654 0.0262549 0.00146348
-0.0262588 0.999652 0.00269019
-0.00139234 -0.00272768 0.999995
Translation Vector: 0.0149013074114919 -0.000272490200586617 3.13341515720822e-05
Extrinsic from "Depth" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Depth" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Color" To "Depth" :
Rotation Matrix:
0.999654 -0.0262588 -0.00139234
0.0262549 0.999652 -0.00272768
0.00146348 0.00269019 0.999995
Translation Vector: -0.0149032659828663 -0.000118751668196637 -5.24087845406029e-05
Extrinsic from "Color" To "Color" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Color" To "Infrared 1" :
Rotation Matrix:
0.999654 -0.0262588 -0.00139234
0.0262549 0.999652 -0.00272768
0.00146348 0.00269019 0.999995
Translation Vector: -0.0149032659828663 -0.000118751668196637 -5.24087845406029e-05
Extrinsic from "Color" To "Infrared 2" :
Rotation Matrix:
0.999654 -0.0262588 -0.00139234
0.0262549 0.999652 -0.00272768
0.00146348 0.00269019 0.999995
Translation Vector: -0.0149032659828663 -0.000118751668196637 -5.24087845406029e-05
Extrinsic from "Color" To "Gyro" :
Rotation Matrix:
0.999654 -0.0262588 -0.00139234
0.0262549 0.999652 -0.00272768
0.00146348 0.00269019 0.999995
Translation Vector: -0.0204232670366764 0.00498124863952398 0.0116875907406211
Extrinsic from "Color" To "Accel" :
Rotation Matrix:
0.999654 -0.0262588 -0.00139234
0.0262549 0.999652 -0.00272768
0.00146348 0.00269019 0.999995
Translation Vector: -0.0204232670366764 0.00498124863952398 0.0116875907406211
Extrinsic from "Infrared 1" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 1" To "Color" :
Rotation Matrix:
0.999654 0.0262549 0.00146348
-0.0262588 0.999652 0.00269019
-0.00139234 -0.00272768 0.999995
Translation Vector: 0.0149013074114919 -0.000272490200586617 3.13341515720822e-05
Extrinsic from "Infrared 1" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 1" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.0496295988559723 0 0
Extrinsic from "Infrared 1" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 1" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: -0.00552000012248755 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 2" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0496295988559723 0 0
Extrinsic from "Infrared 2" To "Color" :
Rotation Matrix:
0.999654 0.0262549 0.00146348
-0.0262588 0.999652 0.00269019
-0.00139234 -0.00272768 0.999995
Translation Vector: 0.0645137503743172 -0.00157570256851614 -3.77673059119843e-05
Extrinsic from "Infrared 2" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0496295988559723 0 0
Extrinsic from "Infrared 2" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Infrared 2" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0441095978021622 0.00510000018402934 0.011739999987185
Extrinsic from "Infrared 2" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.0441095978021622 0.00510000018402934 0.011739999987185
Extrinsic from "Gyro" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Color" :
Rotation Matrix:
0.999654 0.0262549 0.00146348
-0.0262588 0.999652 0.00269019
-0.00139234 -0.00272768 0.999995
Translation Vector: 0.0202683173120022 -0.00554724456742406 -0.0117023847997189
Extrinsic from "Gyro" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Gyro" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Gyro" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Depth" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Color" :
Rotation Matrix:
0.999654 0.0262549 0.00146348
-0.0262588 0.999652 0.00269019
-0.00139234 -0.00272768 0.999995
Translation Vector: 0.0202683173120022 -0.00554724456742406 -0.0117023847997189
Extrinsic from "Accel" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0.00552000012248755 -0.00510000018402934 -0.011739999987185
Extrinsic from "Accel" To "Gyro" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Accel" To "Accel" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
maxi@maxi:~$
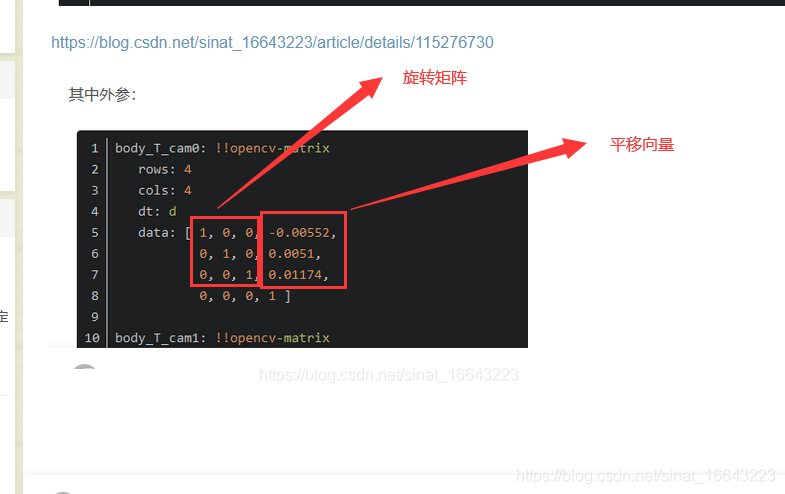
至于为什么vins的双目IMU的标定参数,相机和IMU的是一个4*4的矩阵,而D435i给出的顶多是一个3*3的旋转矩阵和一个3*1的平移向量,而之前同事说是可以用D435i自己的标定参数去跑vins的,说明上面列出的D435i的标定参数是用得上的,我仔细观察到那个4*4的矩阵最后都是0 0 0 1,也就是没有实际的数值,实际数值还是12个,那么就对上了,所以我推测,写成4*4的是为了把旋转矩阵和平移向量写到一个矩阵里面表示。
https://blog.csdn.net/sinat_16643223/article/details/115362074
https://blog.csdn.net/sinat_16643223/article/details/115276730
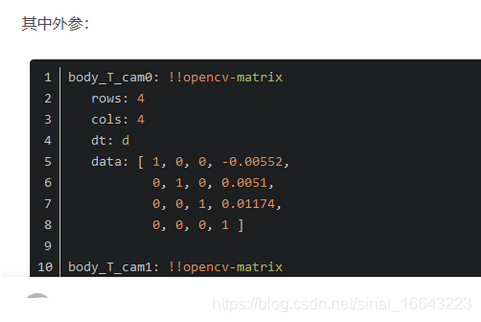
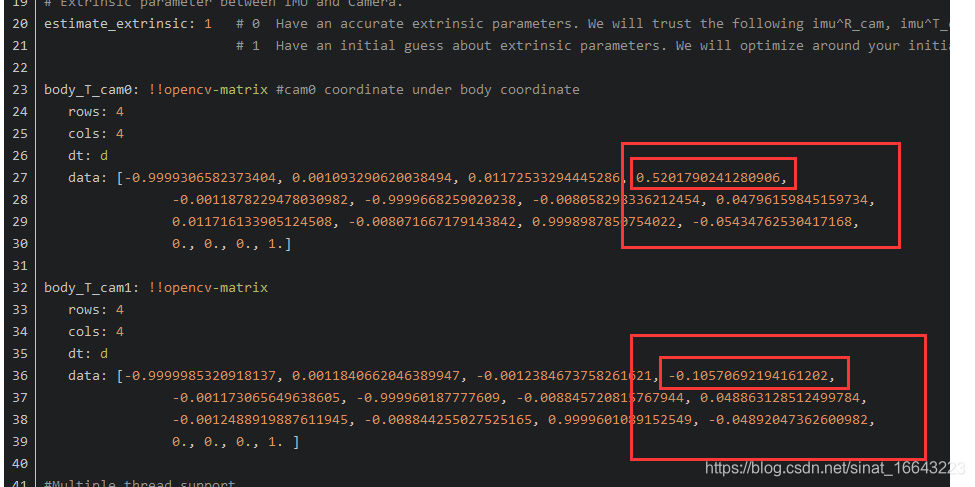
而且我怀疑旋转矩阵,平移向量对应的位置如下,因为差别明显,旋转矩阵可能没有怎么标定就给111了,代表方向都一致,那么剩下三个不是整数的应该是平移矩阵了。
而且具体平移向量三个数的顺序,明显左镜头相比于IMU和右边相机相比于IMU的平移向量,第一个数组相差很大,这第一个数字就体现了某个方向上的距离。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)