文章:https://www.cnblogs.com/we1238/articles/7562028.html
输入量
通过mup6050姿态传感器,我们可以分别得到X、Y、Z轴三个方向的加速度和角速度分量。

输出量
我们需要准确得被测物的姿态角,即欧拉角,且计算的姿态角尽可能与实际姿态角度一致。
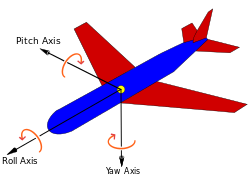
欧拉角是用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角φ组成。我们一般使用pitch(俯仰) yaw(偏航) roll(滚动)表示三个滚动角。如下图所示:
从输入计算输出
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)