前言
学校举办的无人机比赛,要求使用stc15系列芯片设计飞控,然后完成一台四轴的无人机进行穿越障碍的比赛,第一次设计飞控,如果有什么设计得不好的希望大家多多指教。这个博客算是制作流程的记录,整体其实是参考了一个别人的方案。
整体方案构思
飞控板得包括主控芯片和一系列传感器以及功能模块构成,其中传感器得根据需求来选择,有时候还需要拉出一些端口方便增加模块。以下为设计需求和其对应传感器或模块
- 遥控通信 模块:NRF24L01
- 无线调试 模块:匿名数传(之前买的匿名的产品留下的)
- 姿态解算 模块:JY61+AK8975(六轴陀螺仪+电子罗盘组成9轴)
- 定点定高 模块:正点原子光流模块(含光流和激光测距)
- 烧录代码 模块:CH340(板载)
- 声光提示 模块:两颗LED完事儿
这一套方案里除了能满足飞控的基本需求之外,如果将匿名数传的协议稍加移植应该也能使用匿名的上位机,如此一来调试起来就更加方便了,此外还将板载了CH340,不需要额外再用CH340模块烧录,直接插USB完事。
主控芯片
比赛的要求是stc15系列的,这个系列我是第一次接触,不过同样是8051的单片机,我学习过51单片机,这个学习起来应该问题不大,主要是了解如何使用它的外设。我选用的是STC15W4K16S4-30I-LQFP64,没做太仔细的调查,不过粗略一看这一款应该是性能比较好的,主频最高35M,64个引脚,工作电平2.5V~5.5V,四组串口,8路PWM,一路SPI等等,外设的功能应该是足够去调用我上面说到的模块和传感器的。
电路设计
烧录电路
烧录电路直接参考了由立创商城提供的本芯片的文档里面的例子,

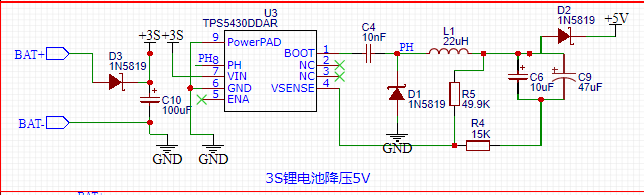
供电电路
供电电路也是参考了别人的方案选定的,因为接的电池是3S点锂电池,需要降压才能给单片机和模块供电,采用了TPS5430降压到5V再使用AMS1117降压到3.3V。

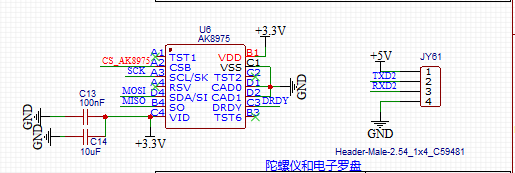
姿态结算相关电路
JY61模块使用比较方便,直接使用串口就能读出姿态角的数据,直接引出一个串口的端口即可。AK8975就需要用SPI协议所以接到单片机的硬件SPI口去。
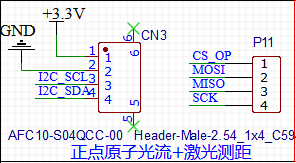
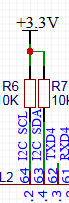
定点定高相关电路
激光测距使用的是I2C,光流数据获取用的是SPI协议。I2C端口需要用IO口模拟操作,所以在选做I2C的IO口处需要上拉电阻。这个电阻的阻值的选配似乎是有一定讲究的,但是我这里没考虑太多直接10k。(希望到时候能用)
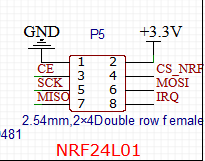
通信模块电路
NRF24L01模块是2*4的8pin公头端口,所以这里直接引出一个母座的端口,相应引脚接上就好。最好记得检查原理图和封装的引脚。
其他电路
还有一些比较简单的电路,用来调试的。
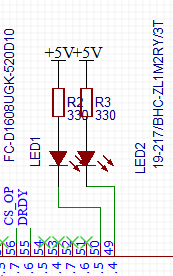
两个LED,方便调试。
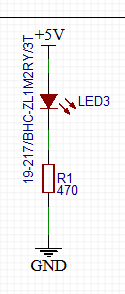
直接接到电源的LED,提示已经上电。
引出的PWM输出

布线
布线真是挺烦的,还要考虑线宽,电路板大小之类的,自动布线不太给力,所以手动布了,第一次布线布局什么的都有点乱。只求做出来能用。

效果图
正面

背面

(老实说这个布线挺乱的,挺担心调试的时候会不会出问题)
实物图

上电后经过初步的调试后没有问题,板子应该是能用的。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)