最近刚刚完成了Windows和Linux双系统(这里以Ubuntu安装为例)的安装,应某奔同学要求,这里简单记录下安装过程。
- 系统启动盘准备
- Windows系统安装
- 分出给Linux系统的磁盘空间
- 安装Linux系统
- EasyBCD安装使用
1 系统启动盘准备
因为不想装第二个系统的时候重做系统盘,所以这里做的系统启动盘本身就是Windows和Linux双系统引导的。这里用的工具前面在docker安装笔记的时候已经介绍过:YUMI。可以翻翻前面的博客进行了解。
花式安装蓝鲸鱼札记
百度搜索的时候,要准确定位,请搜YUMI USB,如果想了解点其他的(咳咳咳),去掉USB。不过另外一点是有人推荐用EFI的版本(虽然觉得差别不大),制作系统启动盘前面的博客也介绍过了。唯一要注意的就是为了做成多引导启动,在选择windows系统制作的时候,记得选择multiboot。
2 Windows系统安装
Windows和Linux双系统安装,通常是选择先装Windows,然后再安装Linux,最后通过Windows引导Linux系统启动。
Windows安装是比较方便的,网上教程颇多,对于还没有系统的电脑来说,其实就是把做好的启动盘插入,然后狂按某FX键(反正视电脑型号和品牌而定)。主要是设置boot,选择从U盘启动。如果是在Windows系统下重装系统,就只需要把我们的系统盘放进去。然后双击setup.exe就好了。
3 分出给Linux系统的磁盘空间
安装完成之后,首先先从Windows的磁盘里面分出給Linux系统的空间。
右击”我的电脑”→”管理”→”存储”→”磁盘管理”
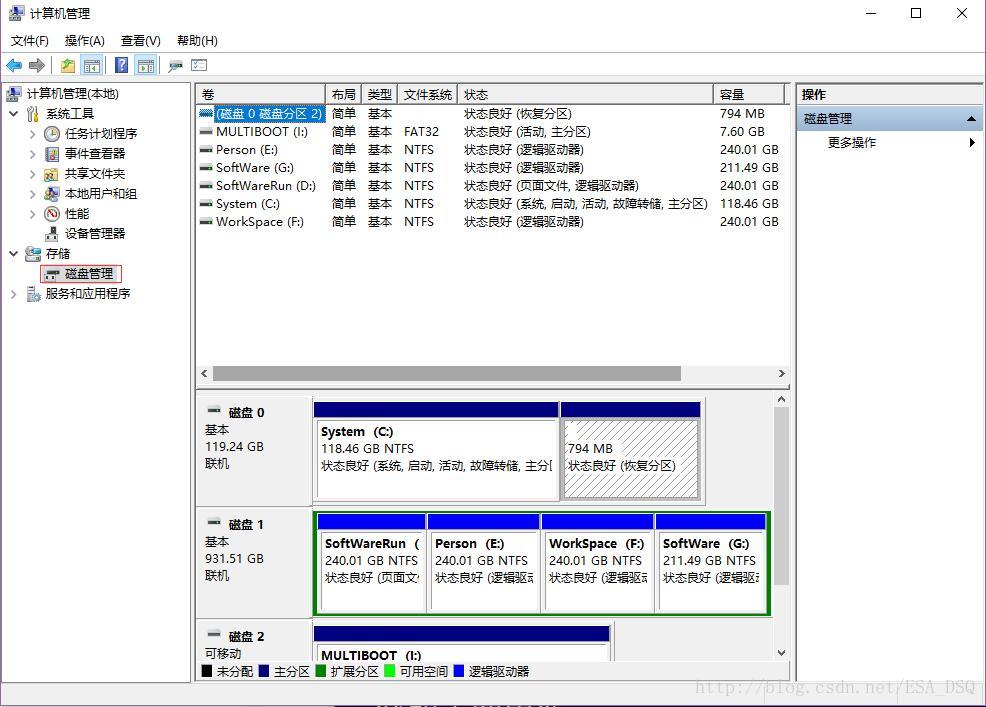
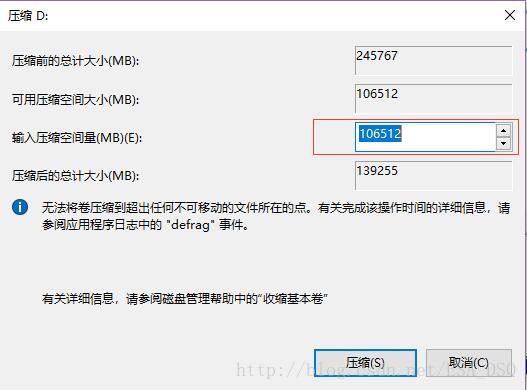
接下来只要选择你要分出空间的盘,右击压缩卷。这个画红圈的就是设置Linux系统的大小,1024M是1G,根据情况分区。
4 安装Linux系统
接下来就插入系统启动盘,重启电脑,通常系统启动盘会引导进入图形安装界面,选择Linux安装。Ubuntu这里会让你选择Win10和Ubuntu共存,还是清除Windows系统,还有一个其它选项,这里选择其它选项。接下来就是Linux系统分区了。这个分区的内容以及具体安装教程参照前面的博客,之前在虚拟机上安装Ubuntu的时候我已经提过了,这里就不详细介绍。
VMware Workstation下安装Ubuntu 64位系统
注意:分区分完了,不能直接安装,最后选用引导的选项必须改选为前面Linux分区里面的”/boot”分区。不能选U盘,也不能选其他盘。然后就可以一路安装了。最后重启电脑。
于是——你发现开起来还是Windows。嗯,主要原因需要用一个多重系统启动引导的文件,这个时候最后一个主人公就要登场了。
5 EasyBCD安装使用
最后一个主人公就是EasyBCD啦,这个软件是用于系统配置创建多重启动系统的引导文件,也就是新创建一个启动文件,可以让你的电脑在启动的时候,有进入何种系统的选择。
EasyBCD官网地址
“添加新条目” -“Linux/BSD”-类型“Grub 2”驱动器“自动定位和加载”-“添加条目”
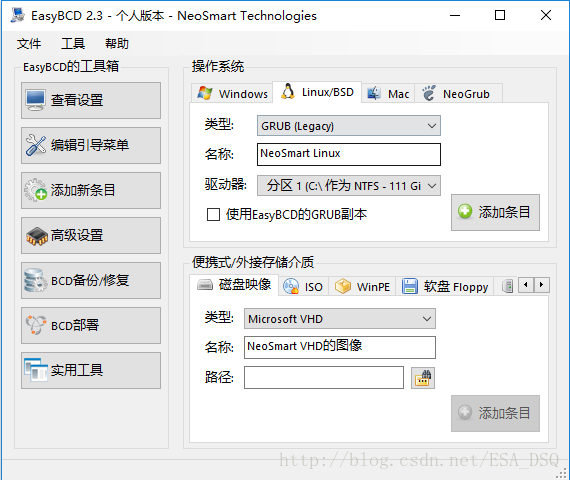
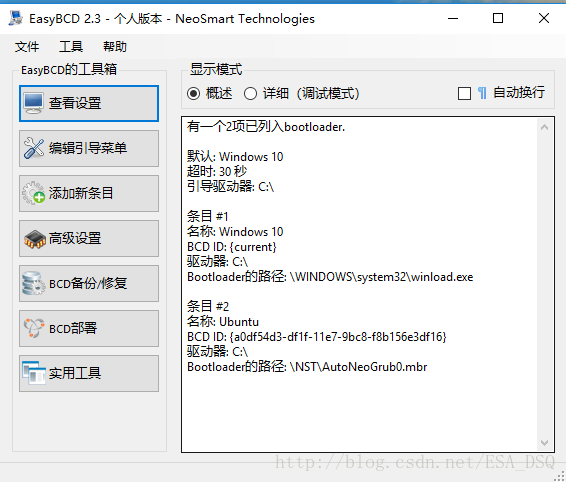
一波操作猛如虎。然后重启电脑就可以了。
最后效果。

顺带感谢一波网上大神,附上链接。
知乎:怎样安装 Windows 7 与 Linux 的双系统?
电脑安装双系统(win+Linux)的一些重要步骤总结
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)