基础工具是Aerospace Blockset模块,该模块是集成的航天航空工具箱,这个工具箱包含了在航空航天领域常用的需要模块,共12个模块组。 全数字仿真系统共由9大模块组成,分别是:飞行器动力学子系统,模态指令生成子系统,飞行仪表子系统,三维视景子系统(本文并未搭建),大气数据子系统,惯导、GPS、无线电子系统,自动飞控系统,人工飞控系统(同未搭建)与舵机模型。每个模块都有相应的作用。 这些模块可以形成一个闭环的全数字仿真整体架构图,如下图所示: 而该模块的内部原理为: 其中各个部分的模块搭建如下图所示: 上图所示是飞行器动力学子系统,根据发动机推力和舵机位置的输入,结合当前的飞行状态实时解算飞行器下一时刻的运动状态。而其中6DOF中的解算思路是: 模态指令生成子系统,根据控制目标生成控制指令。
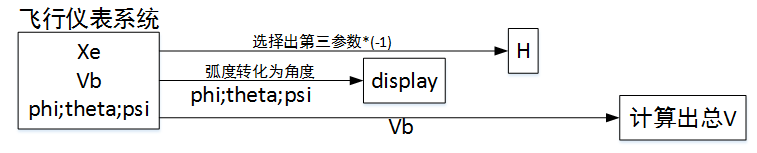
飞行仪表子系统,将飞行器当前的部分运动状态可视化,用仪表的形式显示。 大气数据子系统,相当于大气机的功能,根据飞行状态理论解算气流角、动压和马赫数与大气相关的运动量。 惯导、GPS、无线电子系统,获取飞行器的惯导数据,包括姿态角、角速度、飞行速度和GPS位置以及无线电高度等信息。
自动飞控系统,根据传感系统反馈的信息,结合飞控系统的控制目标,通过控制率实时结算控制输出。 舵机模型,表征了输入输出动态特性,舵机模型的位置输出作为飞行器动力学模型中的气动系数模块的输入。 在simulink中的整体架构是: 飞行控制中的每个模块都在整个回路中都有起着或大或小的作用,形成了一套完整的体系,在搭建时我们要注意各模块以及相应输出输入间的关系。