Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
Jetson nano 的三种供电方式
2023-05-16
1、首先最简单的就是USB供电,使用数据线,连接Jetson nano 的MicroUSB接口进行供电,
拔掉J48跳线帽
。
MicroUSB 的供电为 5V/2A ,仅能支撑5W低功率模式。
MicroUSB供电时,加装USB摄像头很容易掉电。
MicroUSB口可以留作他用。
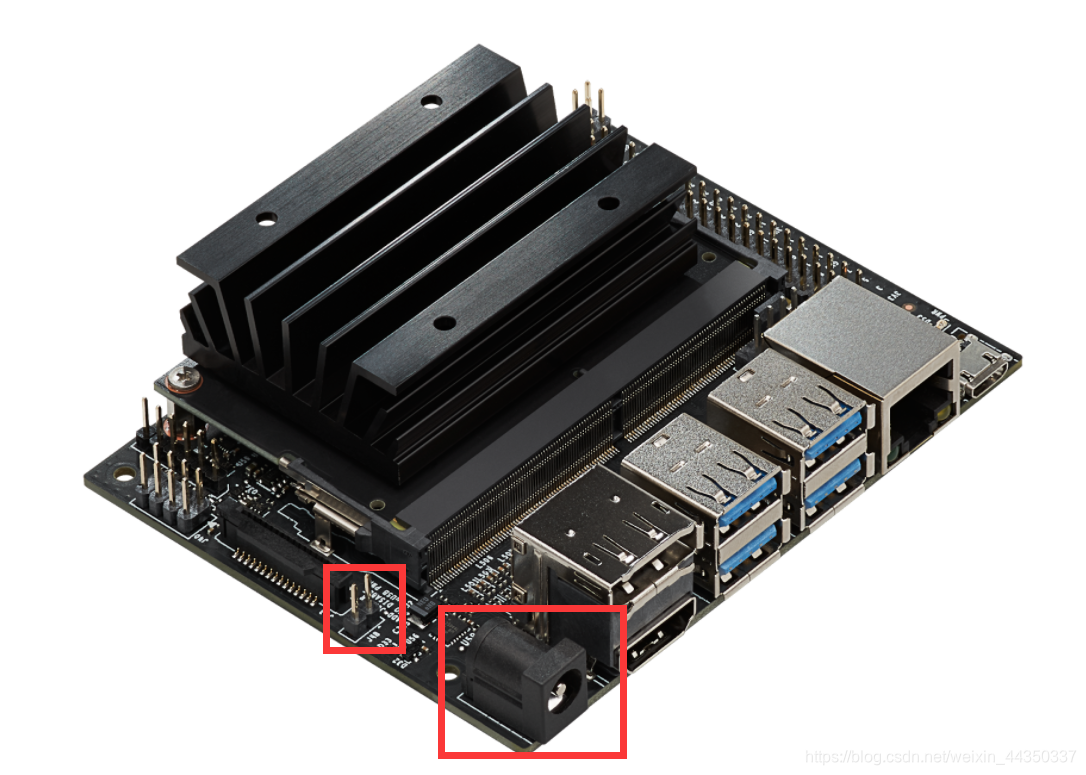
2、使用 DC 供电,官方认证的DC电源是5V 4A (4000mA) switching power supply,台达5V6A的DC电源同样好使。 使用时要在J48插上跳线帽。
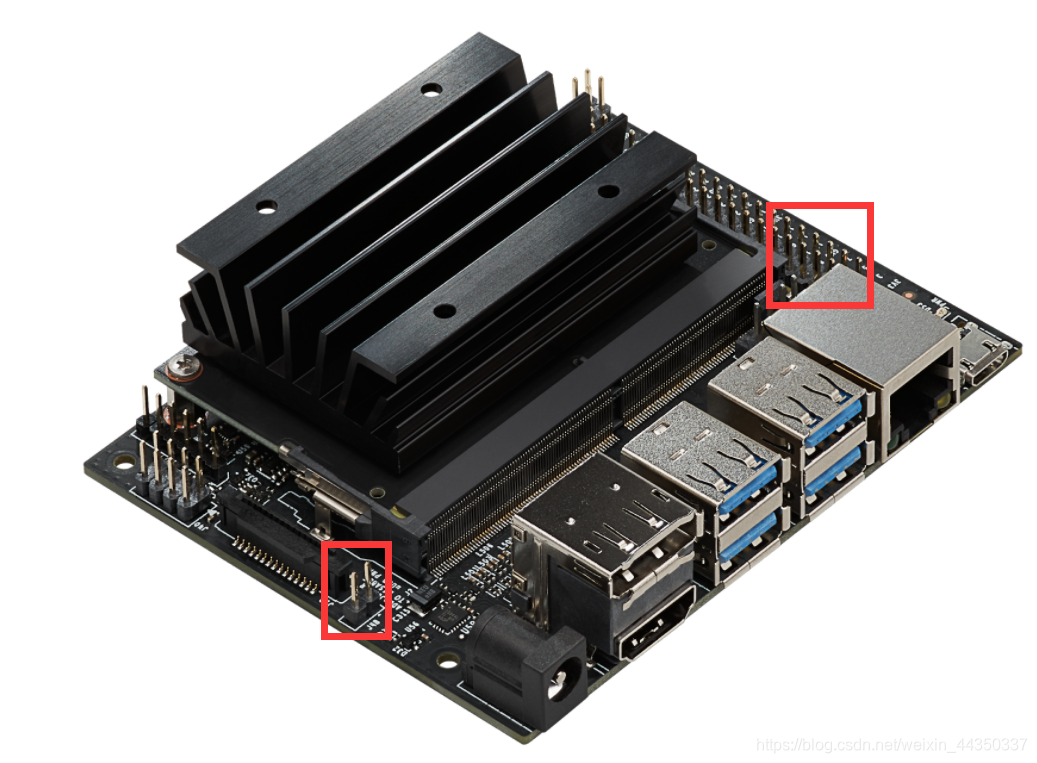
3、使用引脚供电
两个5V的power引脚都可以供3A的供电,如果使用的带电源的扩展板就可以很容易的供电了,至于J48引脚,有无跳线帽均可(GND要连)。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
Jetson
nano
三种供电方式
Jetson nano 的三种供电方式 的相关文章
Jetson TX2在ROS下使用Realsense D435i跑rtabmap、octomap、VINS-Mono和ORB-SLAM2
使用环境 xff1a Ubuntu 16 04 JetPack 3 3 xff0c ROS Kinetic硬件设备 xff1a 英伟达Jetson TX2 xff0c 英特尔Realsense D435i 安装Realsense相关的相机驱
英伟达JETSON XAVIER NX使用小记
1 输入法问题 安装谷歌拼音 xff08 支持ARM64位系统 xff09 系统设置 gt 语言支持 gt 键盘输入法系统 gt 选择 fcitx gt 关闭 在终端中进行安装和部分卸载工作 xff1a sudo apt get insta
jetson nx fan auto pwm
参考 xff1a Jetson Nano PWM自动调速 Ay yzx的博客 CSDN博客 代码 xff1a usr bin env python import os import commands from the path of thi
Jetson NX性能介绍
NX的各个工作模式及功耗 xff1a 与其他jetson系列板卡的对比
Jetson TK1学习(一) 刷机
前言 最早接触TK1是在2015年7月份的DJI ROBOMASTER夏令营里 xff0c 当时DJI推出了用于无人机平台的skymind嵌入式计算机 xff0c 也就是后来的 妙算 34 当时我并没有关注这款计算机的架构 只是当时同组的算
记录一下jetson xaiver 连接51串口
记录一下jetson xaiver 连接51串口 引脚说明 jetson方面 xff1a UART1 TX pin8 UART1 RX pin10 挂载节点 xff1a dev ttyTHS051方面 xff1a UART1 TX GPIO
Jetson nano/NX安装Opencv Cuda版
一 卸载系统自带的opencv sudo apt span class token operator span get purge libopencv span class token operator span python span c
Jetson Xavier NX安装Mavros
Px4飞控通过USB线连接Jetson Xavier NX xff0c 如果需要进行软连接 xff0c 即通讯 xff0c 需要下载Mavros功能包 xff0c 并通过启动命令进行连接 安装Mavros sudo apt install
【jetson nano】在ubuntu18.04下,c++调用链接库实现yolov3
目录 0 前言 1 下载安装opencv 3 4 0 1 1 配置相应的以来库 1 2 下载opencv 3 4 0 xff08 源码 xff09 1 3 编译 xff08 时间较长 xff09 1 4 安装 1 5 配置opencv路径
jetson tx2 刷机,安装 cuda、opencv 详细教程
jetson tx2 刷机 xff0c 安装 cuda opencv 详细教程 jetson tx2 的详细介绍和用途可见官网 xff1a Nvidia jetson tx2 接下来主要说明jetson tx2 详细刷机过程以及在过程中踩过
玩转Jetson Nano(三):安装Pytorch GPU版
玩转Jetson Nano xff08 三 xff09 xff1a 安装Pytorch GPU版 前言安装Pytorch GPU版查看CUDA版本号下载Pytorch对应的wheel文件测试是否安装成功常见问题OSError libmpi
YOLO-darknet-on-Jetson-TX2
YOLO darknet on Jetson TX2 https github com Alro10 YOLO darknet on Jetson TX2 software https blog csdn net cherry dr art
jetson nano ubuntu18.04 ROS安装
历时一天 xff0c 因为之前用手机热点 xff0c 即使换源了下载还是很慢 今天用校园网以后好了很多了 xff08 校园网还是挺好用的 xff09 xff0c 期间也踩了点坑 xff0c 记录一下 xff0c 也希望能帮到看这篇博客的你
4.jetson更换python版本
问题与背景 jetson自带的python版本是3 6 9 xff0c 太老旧了 xff0c 希望更换python版本 尝试替换成python3 7的版本 但是在未替换之前 xff0c 已经装了pip3了 xff0c 是否pip3会与pyt
NVIDIA Jetson Xavier melodic-ros安装
以下方法实测有效 1 修改 source list 换源需要换 ARM 的源 xff0c 不要换成了 PC 平台的软件源 xff0c Xavier 的系统是18 04 bionic sudo vim etc apt sources list
Jetson Xavier NX上安装ROS、Cartographer、基于D435i的Yolov5+TensorRT7的流程及问题解决
主要记录下自己在Jetson Xavier NX上运行ROS Cartographer 基于D435i的Yolov5 43 TensorRT的系统环境配置流程 xff0c 经过了无数次在ARM上的安装 xff0c 这次是最流畅的一次环境配置
yolov8系列[四]-yolov8模型部署
yolov8系列 四 yolov8模型部署jetson平台 jetson平台 0 安装环境 1 下载源代码 2 pt 转换模型转换为 onnx 模型 3 配置deepstream yolo 4 运行 jetson平台 0 安装环境 下载to
Jetson Nano安装pytorch 基于torch1.6和torchvision0.7
需要注意的是 博主使用的是win10主机 通过局域网连接的jetson nano 其中jetson nano的预制CUDA版本为10 2 Jetpack 4 1 1 分别执行以下命令 即可查看自己的jetson nano 预搭载的CUDA版
在 Python 中通过管道传输到脚本时无法启动交互式程序
我有一个 python 脚本需要调用定义的 EDITOR or VISUAL 当单独调用 Python 脚本时 我可以启动 EDITOR没有任何问题 但是当我将某些内容传输到 Python 脚本时 EDITOR无法启动 现在 我正在使用 n
NVIDIA Jetson环境VSCode安装记录,前期失败问题在于英伟达使用的是arm64架构
1 安装失败及原因探索 1 1 报错 Unable to install code The following packages have unmet dependencies 搜索一个链接就开始上手 Ubuntu 22 04安装Visua
随机推荐
IP地址与二进制的转换
以192为例 以192 168 100 7为例 192的二进制为11000000 168的二进制为10101000 100的二进制为01100100 7的二进制为00000111 192 168 100 7的二进制为11000000 101
根据子网掩码求最大主机数(面试被问过)
如子网掩码255 255 240 0 化成二进制11111111 11111111 11110000 00000000 子网号中里面的1代表网络号 xff0c 0代表主机号 xff0c 有12个0 xff0c 即最大主机数为2的12次方 又
麒麟系统安装bin类型文件
在终端 xff08 windows的cmd xff09 运作命令修改文件属性 xff0c 使其可以被执行 chmod a 43 x file bin 运行 sudo file bin
深度和追踪最好use the D415 and the T265 in parallel.
All SLAM solutions and there are many good ones are limited by the information they receive It is possible to run host b
树莓派上编译安装realsense经验
1 树莓派系统一定要用realsense官方指定的ubuntu mate xff0c 树莓派B3 43 只能装18 0 4 xff0c 树莓派B3和以前的只能装16 0 4 2 不要妄想装realsense的非编译版本 xff08 官网说打
树莓派安装realsense自己的步骤梳理
树莓派3B 43 装上ubuntu 18 0 4的内核亲测是 4 15的 xff0c 跟ubuntu官网一致 目前最新的也就是4 15 xff0c 不知道realsense官网瞎扯什么4 16啥的干啥 xff1f 都还没有的东西 xff0c
Opencv快速入门(C++版)
Opencv快速入门 C 43 43 版 Excerpt Opencv快速入门 C 43 43 版 xff09 前言1 图像的读取与显示所使用的API接口 xff1a 代码演示 xff1a 2 图像色彩空间转换所使用的API接口 xff1a
搭建elsticsearch集群遇到的错误
错误一 xff1a 报错with the same id but is a different node instance解决办法 原因 xff1a 是因为复制虚拟机时 xff0c elsticsearch时 xff0c 将elsticse
PX4无人机控制
1 PX4安装 安装主要是配置环境 xff0c 我是按照官网配置的 xff1a PX4 自动驾驶用户指南 特别是对于英语不好的我来讲 xff0c 配置了好几天也没有配置成功 找到了比较靠谱的参考文献 xff1a Ubuntu18 04配置搭
吃透计算机组成原理
文章目录 博主杂谈计算机概论计算机发展历程计算机的分类计算机的结构体系冯诺依曼体系现代计算机体系 计算机的层次与编程语言程序翻译与程序解释计算机层次 计算机计算单位与字符编码计算机计算单位计算机字符编码字符编码种类与历程 计算机内部结构计算
远程显示docker运行结果
查找本地IP 服务器中的docker环境操作步骤 xff1a span class token function export span DISPLAY span class token operator 61 span 10 100 12
笔试——Linux操作系统
1 Linux内核的组成部分 Linux内核主要由五个子系统组成 xff1a 进程调度 内存管理 虚拟文件系统 网络接口 进程间通信 xff1b 2 Linux系统的组成部分 主要是4个部分 xff1a 内核 shell 文件系统和应用程序
WIN11打开照片 浏览器 office等软件启用硬件加速后总黑屏
解决 WIN11打开照片 浏览器 office等软件启用硬件加速后总黑屏 问题描述 xff1a 电脑为暗影精灵6 xff08 OMEN 6 xff0c 在更新intel显卡驱动程序后或者更新win11后 xff08 自动更新最新驱动 xff
linux执行程序运行命令失败,提示找不到命令
安装虚拟机时提示找不到命令 sudo VMware Workstation Full 17 0 0 20800274 x86 64 bundle xff1a 找不到命令 经检查 xff0c sudo命令正常 xff0c 该脚本文件的确存在于
用自己的设备(realsense d435i)跑VINS-Fusion 还是有一些坑
操作环境 设备 xff1a MacBook pro 2019 xff0c realsense d435i 系统 xff1a Ubuntu 16 04 lts 准备工作 标定 首先标定摄像头 xff0c 这里用kalibr对摄像头和imu进行
realsense d435i获取与rgb图像对应的深度值
设置 realsense ros 的rs camera launch文件 lt arg name 61 34 align depth 34 default 61 34 true 34 gt 就能得到与图像对应的深度图 比如rgb对应的深度图
OpenVINS 配置,并用自己的设备跑起来~
OpenVINS 下载编译 span class token function mkdir span p workspace catkin ws ov src span class token function cd span worksp
用realsense d435i传感器在实际环境中跑ORB_SLAM3,顺带解决一部分编译问题
是的ORB SLAM3 来了 xff0c 时隔五年 xff0c 它来带的惊喜到底是啥呢 xff1f 一个完全依赖于最大后验估计 xff08 MAP xff09 的单 双目惯导融合系统高回召的地点识别功能 xff08 High recall
ubuntu安装vnc server-x11vnc并设置开机自动启动
安装x11vnc 打开终端 xff0c 使用如下命令女装x11vnc sudo apt get install x11vnc 手动启动x11vnc 按组合键CTRL 43 ALT 43 T打开终端 xff0c 输入 xff1a sudo u
Jetson nano 的三种供电方式
1 首先最简单的就是USB供电 xff0c 使用数据线 xff0c 连接Jetson nano 的MicroUSB接口进行供电 xff0c 拔掉J48跳线帽 MicroUSB 的供电为 5V 2A xff0c 仅能支撑5W低功率模式 Mic
热门标签
simpletype
redefine
faraday
testngxml
ngresource
inquirerjs
pacejs
npmlogin
insertinto
asif
nsassert
ubsan
ora00942
gaesearch