安装 VINS-fusion VINS-Mono
将vins-mono 下载到ros工作空间catkin_ws里面
cd /home/jiangz/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
遇到的bug基本可以通过下面三个解决
进入调试模式 :https://www.cxybb.com/article/u014527548/86503256
**opencv4 安装 VINS :遇到的bug
千万不要多安装一个opencv3!!!**会因为两个库冲突,导致segment fault!
https://zhuanlan.zhihu.com/p/432167383
https://blog.csdn.net/tjj1998/article/details/110500320
ceres问题 :
https://blog.csdn.net/weixin_56024057/article/details/128344034
使用T265相机启动
由于VINS-Fusion里面的t265相机的yaml包已经没有了,这次测试 VINS—Mono的
roslaunch vins_estimator realsense_fisheye.launch
roslaunch vins_estimatot vins_rviz.launch
rosbag play xxx.bag
注意需要修改 realsense_fisheye.launch 里面的相机内参,tpoic和输出路径名字
内参的来源参考了这篇文章:https://blog.csdn.net/weixin_45810108/article/details/116917579
%YAML:1.0
imu_topic: "/camera/imu"
image_topic: "/camera/fisheye1/image_raw"
output_path: "~/catkin_ws/src/VINS-Fusion-master/vins_output"
model_type: KANNALA_BRANDT
camera_name: camera
image_width: 848
image_height: 800
projection_parameters:
k2: -0.00836907513439655
k3: 0.0468319803476334
k4: -0.0438220910727978
k5: 0.00818893685936928
mu: 285.814514160156
mv: 285.921997070312
u0: 424.557891845703
v0: 394.814086914062
estimate_extrinsic: 1
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0.99992917, 0.00878151, 0.00803387,
-0.00870674, 0.9999189, -0.0092943,
-0.00811483, 0.00922369, 0.99992453]
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.00188568, 0.00123801, 0.01044055]
max_cnt: 120
min_dist: 30
freq: 10
F_threshold: 1.0
show_track: 1
equalize: 0
fisheye: 0
max_solver_time: 0.04
max_num_iterations: 8
keyframe_parallax: 10.0
acc_n: 0.08
gyr_n: 0.004
acc_w: 0.00004
gyr_w: 2.0e-6
g_norm: 9.805
loop_closure: 1
fast_relocalization: 1
load_previous_pose_graph: 0
pose_graph_save_path: "~/catkin_ws/src/VINS-Fusion-master/vins_output/pose_graph/"
estimate_td: 1
td: 0.010
rolling_shutter: 0
rolling_shutter_tr: 0
save_image: 1
visualize_imu_forward: 0
visualize_camera_size: 0.4
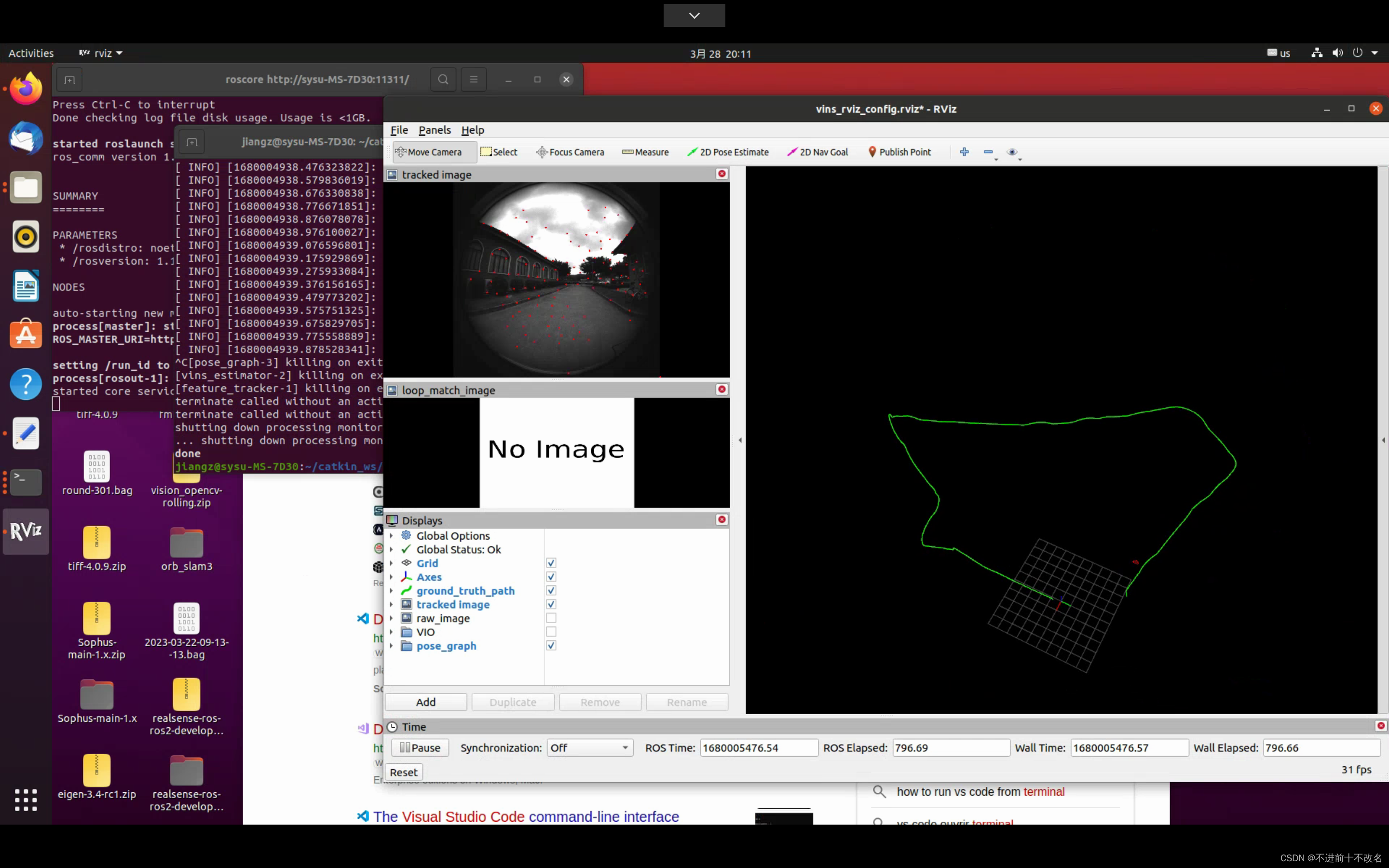
效果:
不咋地,会漂移,具体原因还需要进一步的探究,但是终究是跑起来了555
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)