本文章主要记录Visual Studio2019的安装过程,由于只用于开发C/C++,因此关于其它语言支持将不安装,仅供参考。
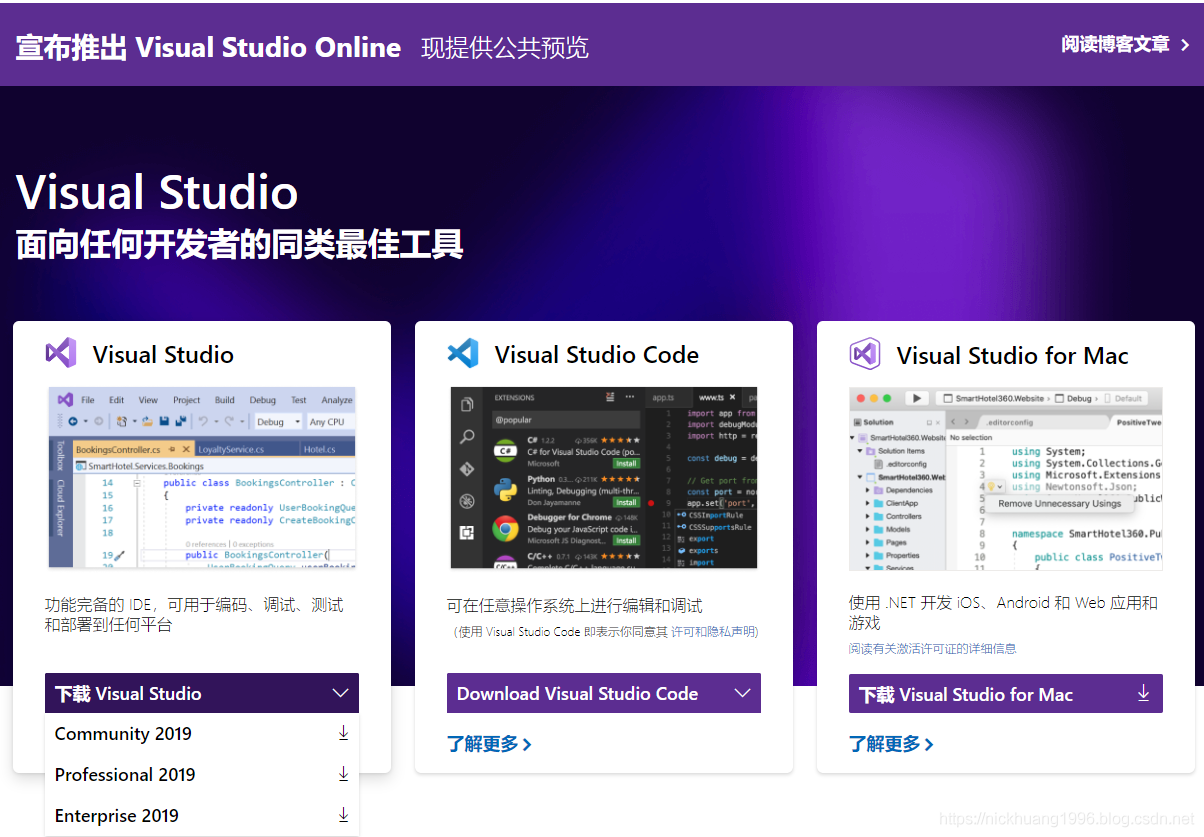
1.下载地址在微软官网:微软官网 2.选择菜单栏最右边的更多,在“所有 Microsoft”下拉一栏选择“Visual Studio”进入 3.进入之后是这个界面,选择社区版Community下载(社区版Community是对个人免费的,一共有三个版本),这里下载的不是整个安装包,因此比较小,很快就能下完。
1.点击下载程序,会显示这个界面
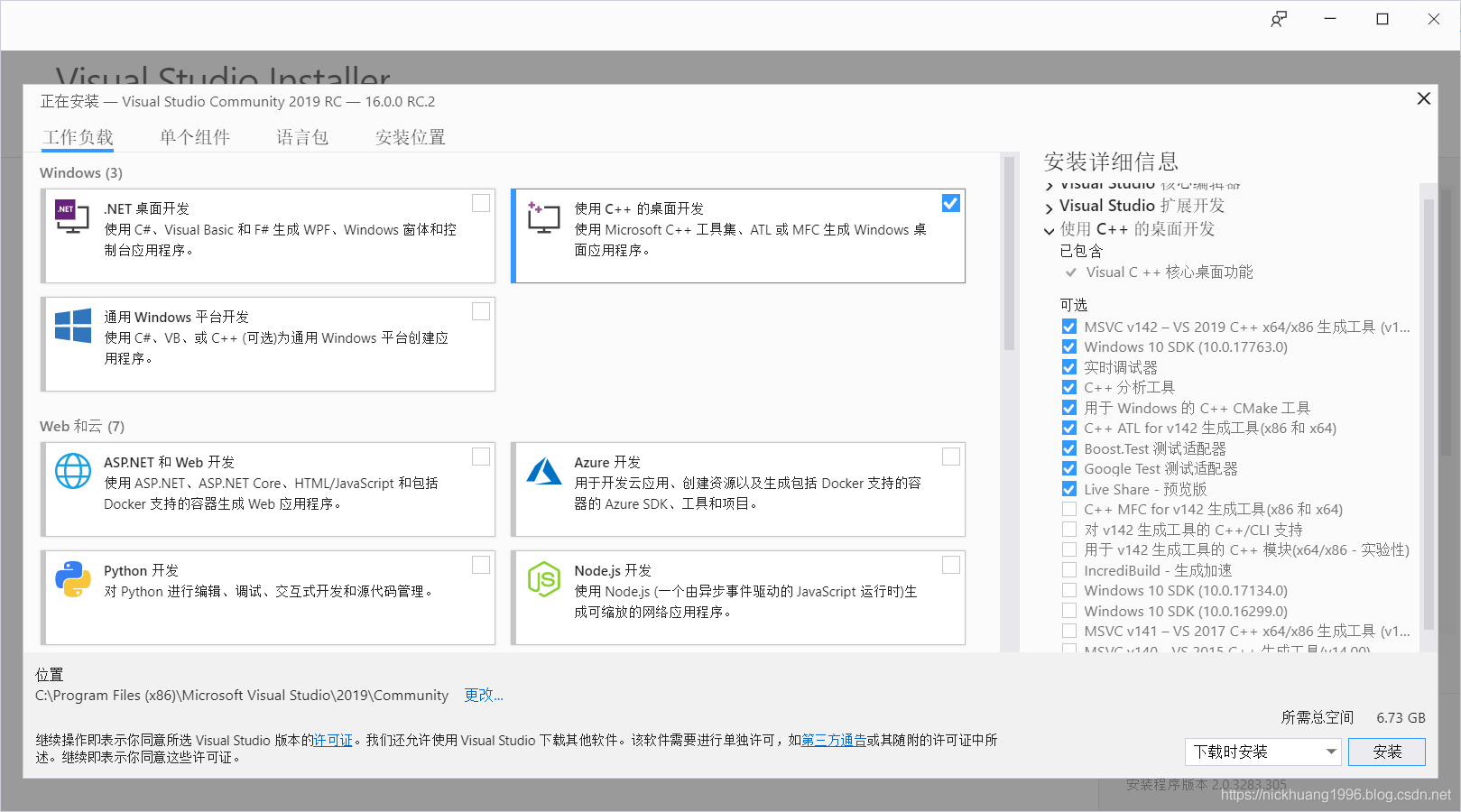
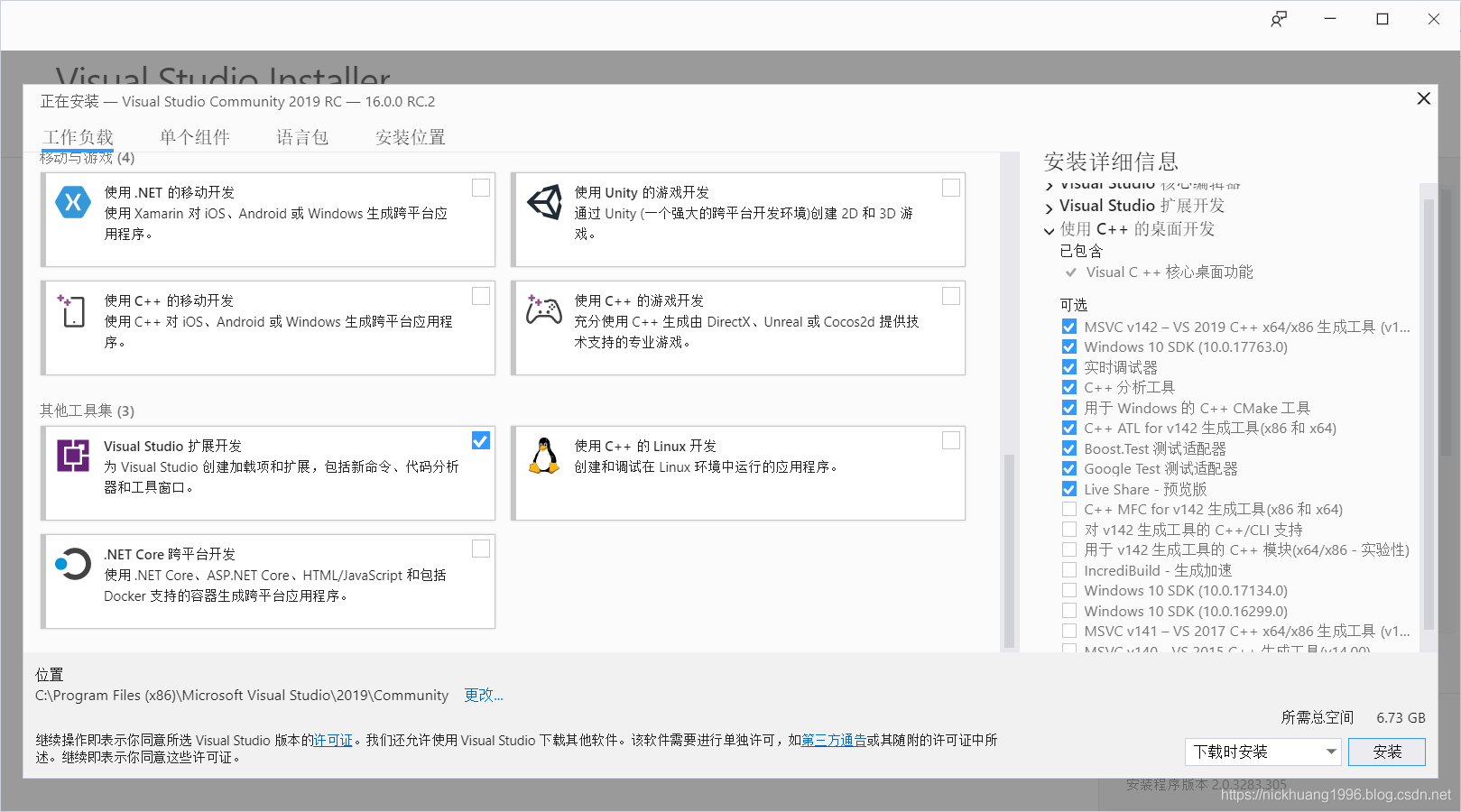
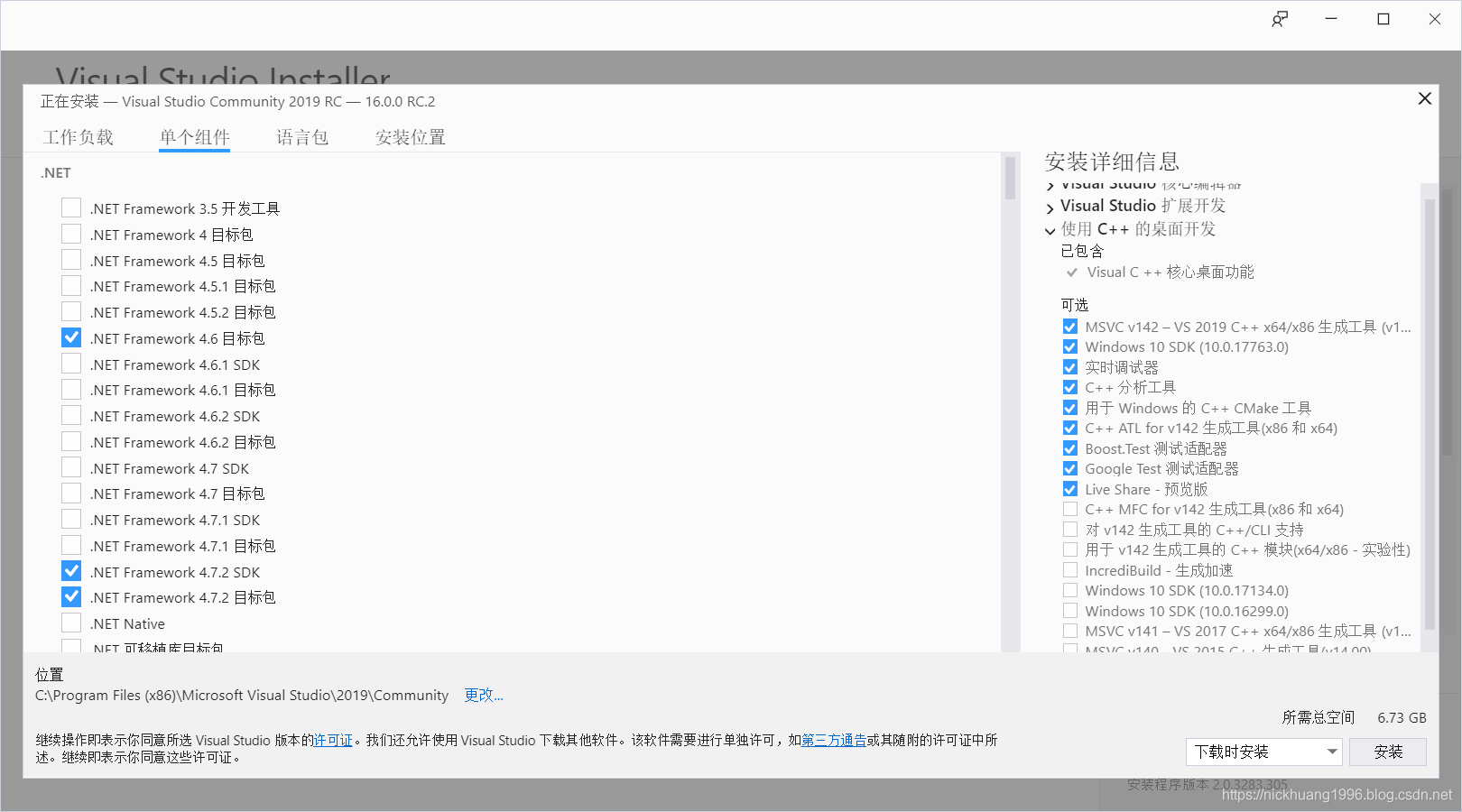
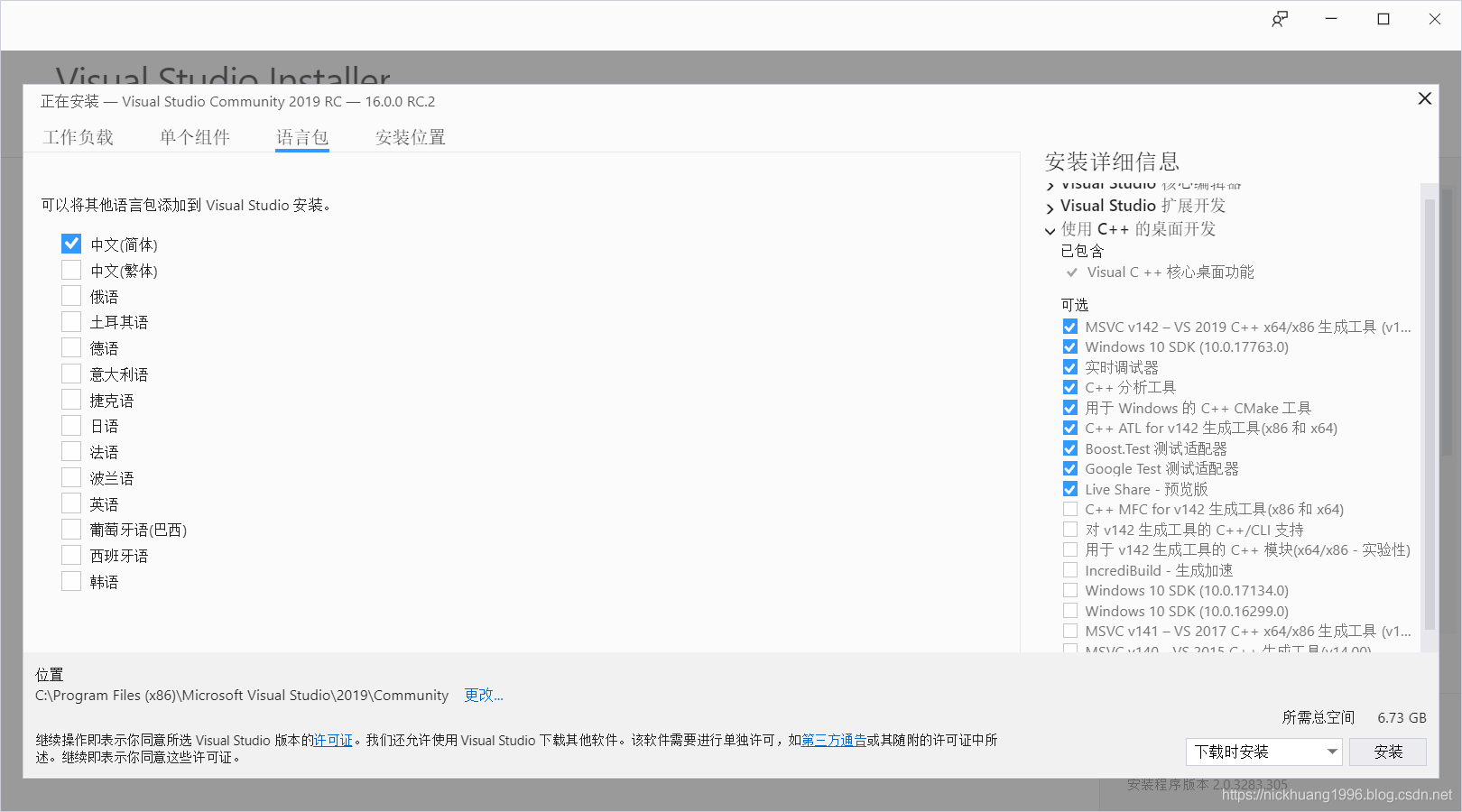
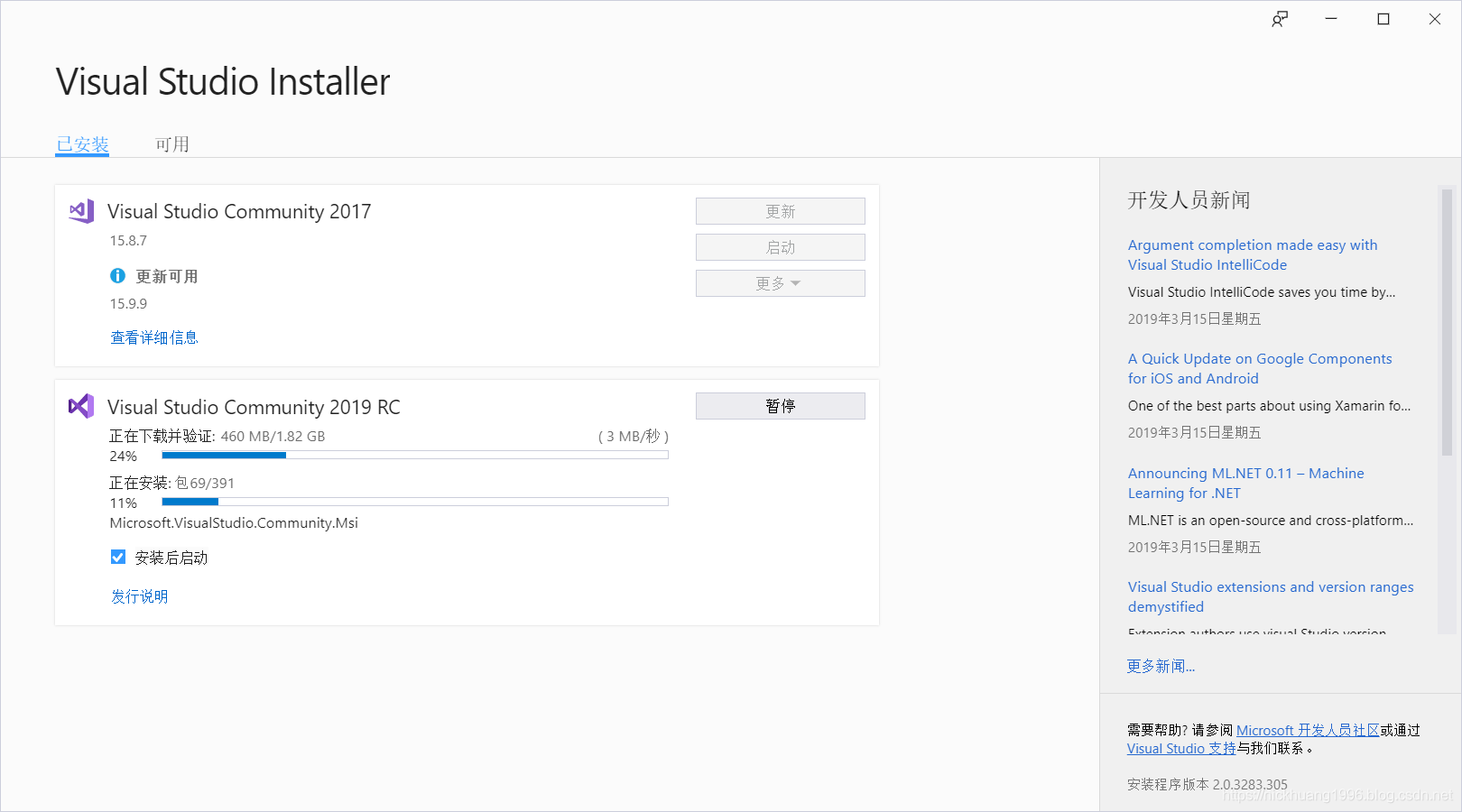
2.点击“继续”,等待安装程序安装完成 3.安装程序下载安装验证完毕,将会提示进入这个界面 4.为了方便起见,这里仅展示安装C++功能,工作负载这里我们可以勾选使用C++的桌面开发和Visual Studio 扩展开发 5.安装位置可以在下面更改 6.单个组件可以自行勾选,工作负载里勾选了项目相关的组件也会在单个组件中自行勾选上,这里我使用的是默认配置没动 7.语言包有很多选项,这里默认是中文(简体) 8.之后点击下方的下载时安装或下载完成后安装都可以,之后就是漫长的等待下载整个安装包。 9.下载完后会自动安装,安装完成后如下(2017版是之前安装的,可以和2019版同时存在) 10.完成后点击启动即可,第一次启动会耗时长一点