提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 一.创建工作区
- 二、加载模型
- 三、正经地创建一个工作区的方法:
-
- 4.c++编写ros2程序
- 5.python编写ros2程序
一.创建工作区
ros2不像ros1那样需要catkin_init_workspace初始化工作空间,直接创建一个src文件夹,其中放入工程文件夹即可。
然后colcon build就可以编译了.
编译完后,导入setup.bash
然后ros2 launch turtlebot3_gazebo empty_world.launch.py
报错:
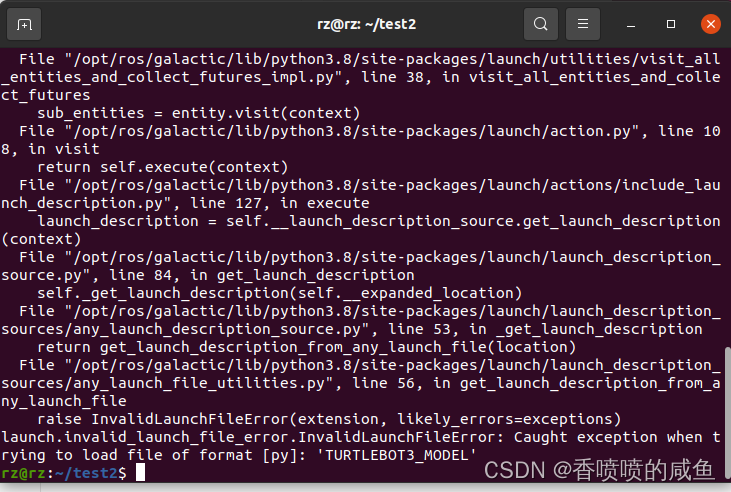
原因:未加入model模型
二、加载模型
GAZEBO_RESOURCE_PATH代表的是gazebo源,一般ubuntu系统安装了gazebo,就是指向系统的gazebo路径!不要再给一个路径!
//加入gazebo的模型文件
export GAZEBO_MODEL_PATH=/home/rz/test2/src/turtlebot3_simulations/turtlebot3_gazebo/models:${GAZEBO_MODEL_PATH}
//选择模型的类型。乌姆 嗯
export TURTLEBOT3_MODEL=waffle
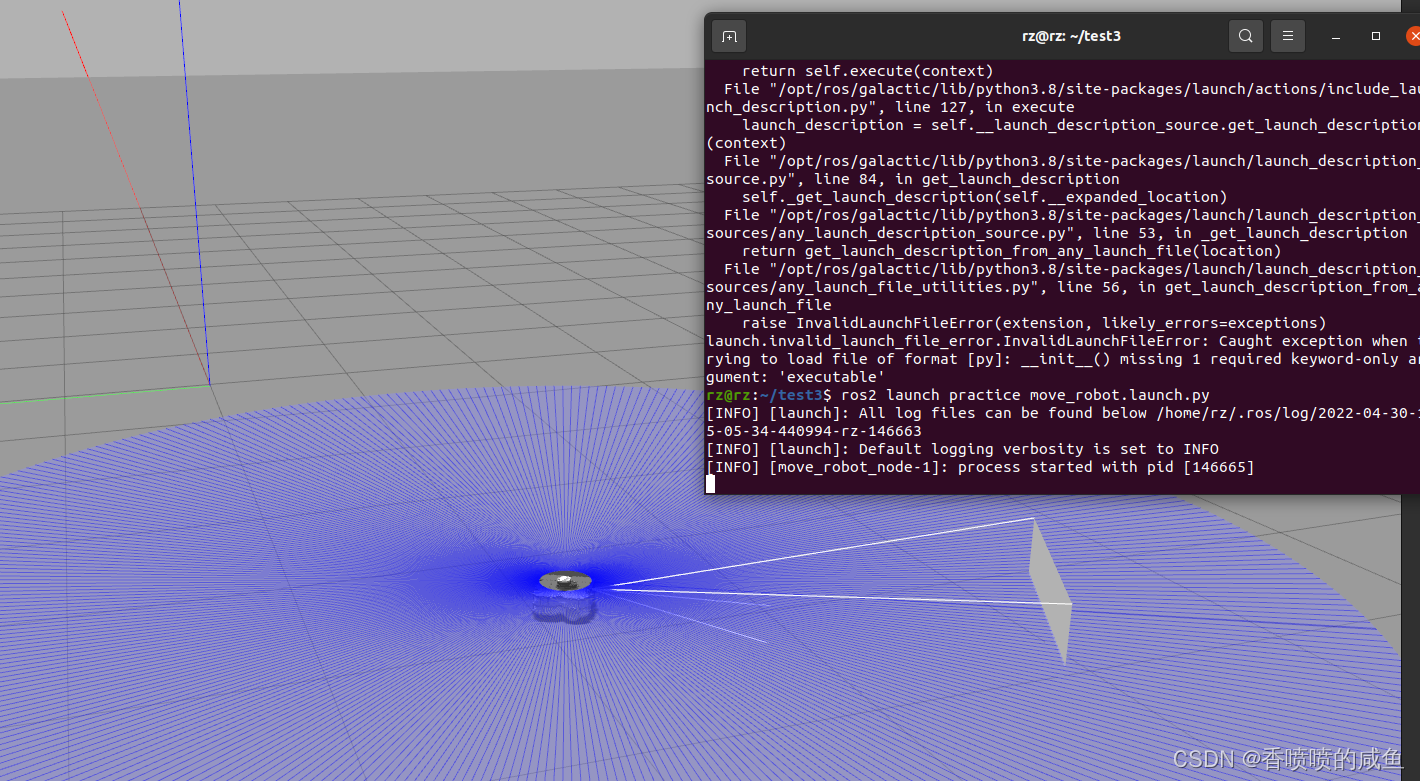
之后再次roslaunch时候出现:
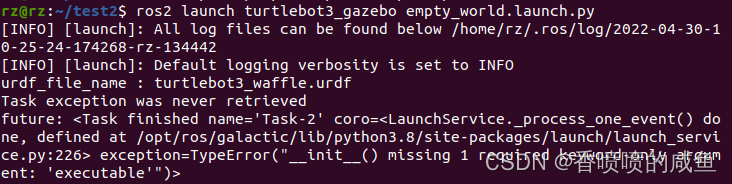
原因:
在galactic版,有两个标签换名了(executable、name)
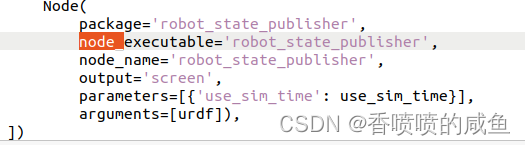
改为:
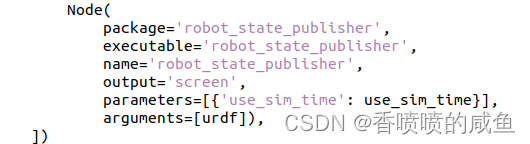
就可以用了。当然 不要忘记重新编译!!
成功!
三、正经地创建一个工作区的方法:
1.c++
ros2 pkg create <package_name> --build-type ament_cmake --dependencies <package_dependecies>
例:
查看工作pkg:
2.编译
1.colcon build:编译整个src工作区
2.colcon build --packages-select <package_name>:编译src中的package_name文件夹
3.launch.python
from launch import LaunchDescription
import launch_ros.actions
def generate_launch_description():
return LaunchDescription([
launch_ros.actions.Node(
package='', node_executable='', output=''),
])
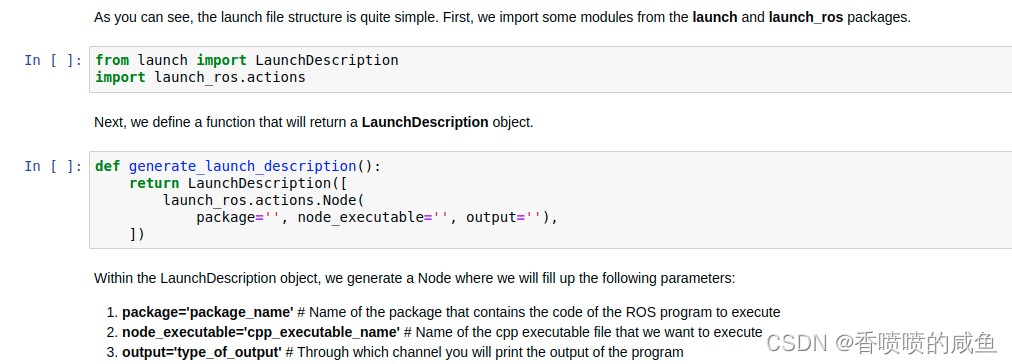
这就是launch文件的大体格式:
package后是程序文件的父目录
node_executable后是程序文件在编译后,生成的可执行文件的名称!!!
output后是想要输出结果的方式,通常是"screen"
4.c++编写ros2程序
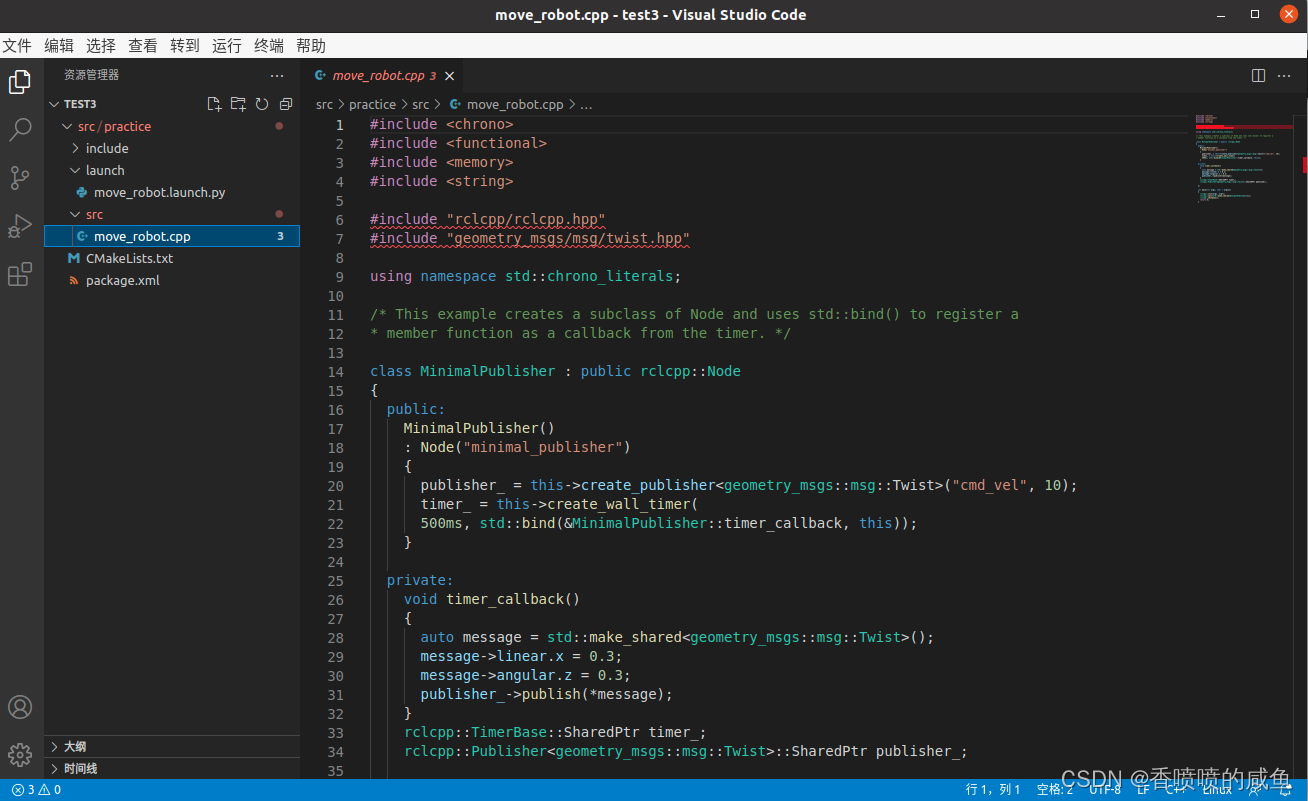
1.创建程序文件(cpp)
#include <chrono>
#include <functional>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher")
{
publisher_ = this->create_publisher<geometry_msgs::msg::Twist>("cmd_vel", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std::make_shared<geometry_msgs::msg::Twist>();
message->linear.x = 0.3;
message->angular.z = 0.3;
publisher_->publish(*message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
2.launch导入
from launch import LaunchDescription
import launch_ros.actions
def generate_launch_description():
return LaunchDescription([
launch_ros.actions.Node(
package='practice', executable='move_robot_node', output='screen'),
]) 这里填写的'move_robot_node'是指生成后的名字 ,注意!此处的executabld前没有node!
3.修改cmakelists.txt 以 编译
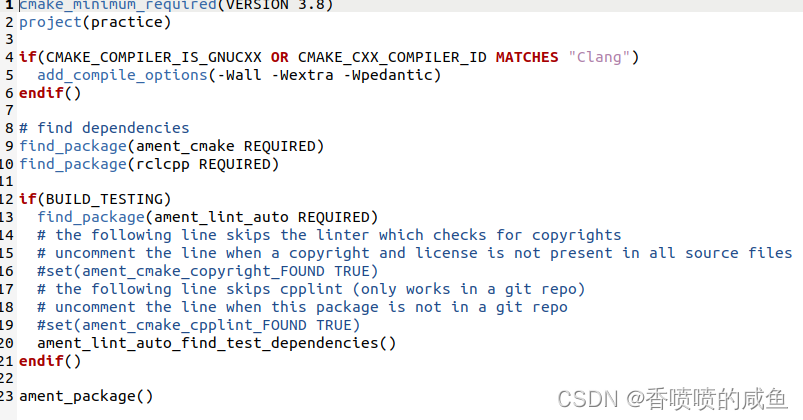
这是自动生成的cmake文件
解释:
1.find_package:后面存放依赖项,这里我初始创建的时候,声明了ament_cmake(似乎是用于编译的默认文件)和rclcpp,在cpp程序中,还用到了geometry_msgs,因此需要添加:find_package(geometry_msgs REQUIRED)

2.add_executable:它会产生一个节点,第一个参数是节定名称,第二个参数用于存放可编译的程序文件,在编译的时候,就会把此文件转换为可执行文件因此还需要添加:add_executable(move_robot_node src/move_robot.cpp)
3.ament_target_dependencies:为执行文件添加依赖,这里需要添加:ament_target_dependencies(move_robot_node rclcpp geometry_msgs)
4.install(TARGETS 『可执行文件』 DESTINATION lib/
P
R
O
J
E
C
T
N
A
M
E
)
:
这
里
指
的
是
下
载
必
要
文
件
到
i
n
s
t
a
l
l
/
l
i
b
文
件
夹
内
,
可
执
行
文
件
被
默
认
下
载
到
/
r
o
s
2
w
s
/
i
n
s
t
a
l
l
/
<
p
a
c
k
a
g
e
n
a
m
e
>
/
l
i
b
.
因
此
需
要
添
加
:
i
n
s
t
a
l
l
(
T
A
R
G
E
T
S
m
o
v
e
r
o
b
o
t
n
o
d
e
D
E
S
T
I
N
A
T
I
O
N
l
i
b
/
{PROJECT_NAME}):这里指的是下载必要文件到install/lib文件夹内,可执行文件被默认下载到~/ros2_ws/install/<package name>/lib.因此需要添加: install(TARGETS move_robot_node DESTINATION lib/
PROJECTNAME):这里指的是下载必要文件到install/lib文件夹内,可执行文件被默认下载到 /ros2ws/install/<packagename>/lib.因此需要添加:install(TARGETSmoverobotnodeDESTINATIONlib/{PROJECT_NAME}
)
(这是默认要添加的东西!不要问为什么需要install)
这里的可执行文件就是上面add_executable中第一个参数(节点名)
5.install(DIRECTORY 『launch』 DESTINATION share/${PROJECT_NAME}/): 类似于上面,只不过下载的文件是launch。
添加完后,就可以编译了!

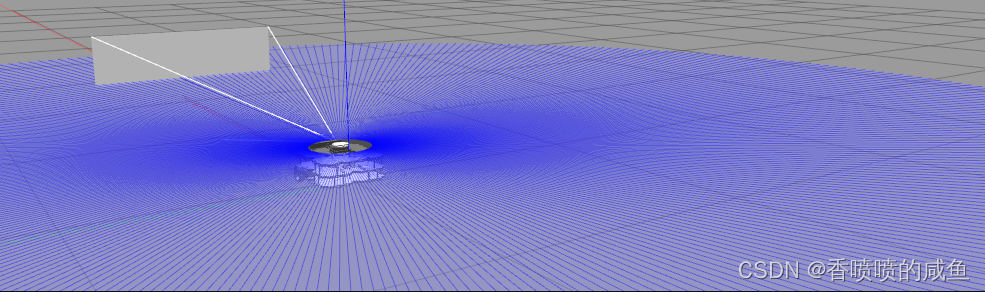
编译成功!
成功运行!小车开始转圈了。
ctrl+c,停止转圈的的节点后,小车依然旋转,是因为小车在依然接收最后一个旋转的主题,要想停止旋转,则发送一个停止转圈的主题即可!
ros2 topic pub --once /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}"
小车停止转圈。
5.python编写ros2程序
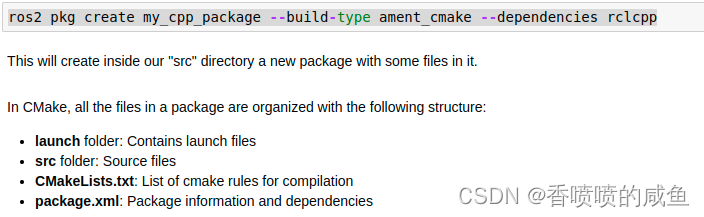
1.命令行创建python pkg
ros2 pkg create my_py_package --build-type ament_python --dependencies rclpy
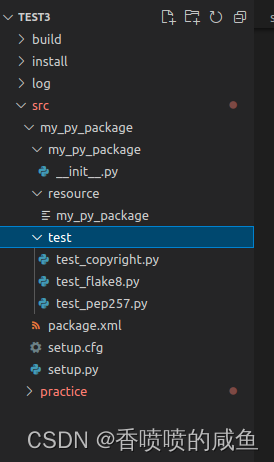
package.xml: 关于包的元信息
setup.py:如何下载package的说明
setup.cfg:让ros2可以找到的程序路径,程序路径在编译时用到。
/package_name: 用于放自己编写的程序。
2.编写py程序
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = Twist()
msg.linear.x = 0.5
msg.angular.z = 0.5
self.publisher_.publish(msg)
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
放入my_py_package文件夹中。
3.编写launch文件
from launch import LaunchDescription
import launch_ros.actions
def generate_launch_description():
return LaunchDescription([
launch_ros.actions.Node(
package='my_py_package', executable='move_robot_node', output='screen'),
])
放入新建的launch文件夹内。
4.调整setup.py
from setuptools import setup
import os //添加
from glob import glob //添加
package_name = 'my_py_package'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name), glob('launch/*.launch.py')),//launch内所有的launch.py文件,将其下载至share文件夹内
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='rz',
maintainer_email='rz@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'move_robot_node = my_py_package.move_robot:main', //这句话意思:创建一个可执行文件,可执行文件名为move_robot_node,路径是在my_py_package.move_robot,指定main函数。
],
},
)
import os //添加
from glob import glob //添加
data_files=[
(‘share/ament_index/resource_index/packages’,
[‘resource/’ + package_name]),
(‘share/’ + package_name, [‘package.xml’]),
(os.path.join(‘share’, package_name), glob(‘launch/*.launch.py’)),//launch内所有的launch.py文件,将其下载至share文件夹内
],
entry_points={
‘console_scripts’: [
‘move_robot_node = my_py_package.move_robot:main’, //这句话意思:创建一个可执行文件,可执行文件名为move_robot_node,路径是在my_py_package.move_robot,指定main函数。
],
},
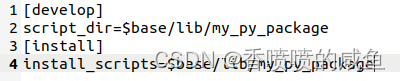
5.调整setup.cfg
将程序内容变异后,下载的路径,就存在这里面!
检查依赖项目:
rosdep install -i --from-path src --rosdistro galactic -y
6.导入路径后,编译运行即可!
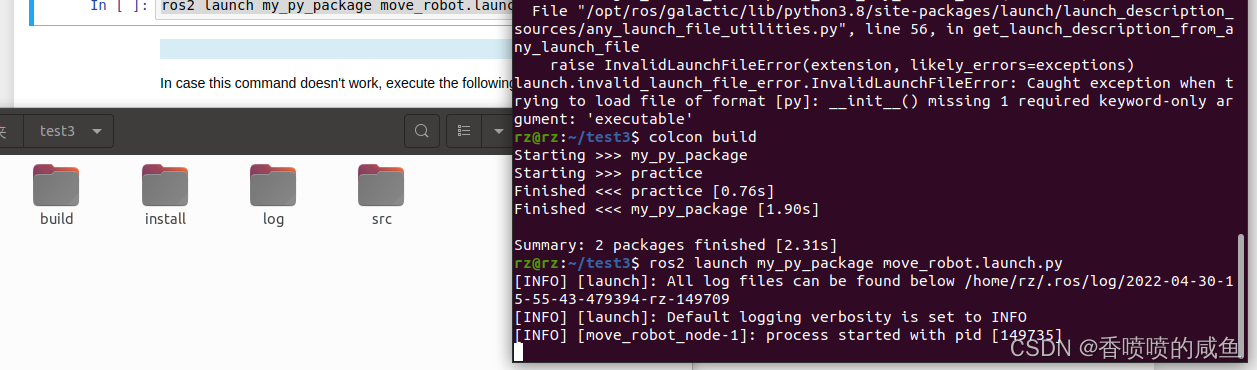
成功!小车再次转圈了
以上内容参考:
https://www.youtube.com/watch?v=ARIgQfu7ivE&list=PL4kY9sZGfkEFuSJC5vt-Y4iVVG7zWkWpR&index=57
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)