????????????????
欢迎来到本博客
❤️❤️????????
????博主优势:
????????????
博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️
座右铭:
行百里者,半于九十。
????????????
本文目录如下:
????????????
目录
????1 概述
????2 运行结果
2.1 改进的CI融合估值器
2.2 基于现代时间序列分析方法,对局部传感器构造ARMA信息模型,利用射影定理和白噪声估值器,得到局部状态估计,然后进行融合
2.3 带相关噪声多传感器时滞系统CI融合估值器
2.4 带有色噪声多传感器时滞系统CI融合估值器
????3 参考文献
????4 Matlab代码实现
????1 概述
文献来源:
基于Kalman滤波和现代时间序列分析方法,我们可以利用多种融合估计技术来实现对状态的融合估计。这些技术包括集中式融合估计、分布式融合估计(按矩阵加权、按对角阵加权、按标量加权)、以及协方差交叉融合等方法。通过这些技术,我们能够更有效地整合不同传感器或数据源提供的信息,以提高状态估计的准确性和鲁棒性。在集中式融合估计中,我们将所有传感器或数据源提供的信息集中到一个中心节点进行融合,以得到全局状态估计。而在分布式融合估计中,我们可以根据不同的权重方案,将各个传感器或数据源提供的信息进行加权融合,从而得到更为灵活和适应性更强的状态估计结果。同时,协方差交叉融合方法可以帮助我们更好地处理不同传感器或数据源之间的协方差关系,进一步提高融合估计的精度和鲁棒性。这些技术的应用将为状态估计和预测提供更加可靠和全面的支持,有助于解决多传感器融合问题中的挑战。
主要是针对多传感器多时滞(包括状态之后和观测滞后)系统,基于
Kalman滤波
和
现代时间序列分析方法
,利用
集中式融合估计
、
分布式融合估计
(按矩阵加权、按对角阵加权、按标量加权)、
协方差交叉融合
等方法实现对状态的融合估计。
针对多传感器多时滞系统,我们可以利用基于Kalman滤波和现代时间序列分析方法的多种融合估计技术来实现对状态的融合估计。这些技术包括集中式融合估计、分布式融合估计(按矩阵加权、按对角阵加权、按标量加权)、以及协方差交叉融合等方法。
具体来说,我们可以采用SCI Fusion Kalman Filter for Multi-Sensor Systems with Multiple Time Delayed Measurements,这一方法利用斜方差交叉(CI)融合方法进行状态估计,适用于处理多传感器系统的多时滞情况。另外,Improved covariance intersection fusion Kalman filter for multi-sensor systems with multiple time delayed measurements则利用改进后的协方差交叉融合(ICI)方法实现对状态的估计,相较于原来的CI融合算法,可以提高精度。
此外,Modern Time Series Analysis Method for Multi-Sensor Systems with Time Delayed Measurements则基于现代时间序列分析方法,对局部传感器构造ARMA信息模型,利用射影定理和白噪声估值器,得到局部状态估计,然后进行融合。而SCI Fusion Estimations for Multi-Sensor Time-Delay Systems with Correlated Noise则为了避免噪声相关带来的推导上的复杂性,先将带相关噪声的系统转化为带不相关白噪声的系统,然后再进行融合。
最后,Sequential Covariance Intersection Fusion Kalman Filter for Multiple Time-delay Sensor Network Systems with Colored Noise则将带有色噪声的系统转化为带相关噪声的系统,然后再进行融合。这些方法的应用将为多传感器多时滞系统的状态估计提供更为精确和鲁棒的支持,有助于解决复杂系统中的状态融合问题。
内容包括:
-
Improved covariance intersection fusion Kalman filter for multi-sensor systems with multiple time delayed measurements(带观测滞后多传感器系统的改进协方差交叉融合Kalman滤波器) 利用改进后的协方差交叉融合(ICI)方法实现对状态的估计,相较于原来的CI融合算法,可以提高精度。
-
Modern Time Series Analysis Method for Multi-Sensor Systems with Time Delayed Measurements 基于现代时间序列分析方法,对局部传感器构造ARMA信息模型,利用射影定理和白噪声估值器,得到局部状态估计,然后进行融合。
-
SCI Fusion Estimations for Multi-Sensor Time-Delay Systems with Correlated Noise(带相关噪声多传感器多时滞系统的SCI融合估值器) 为了避免噪声相关带来的推导上的复杂性,先将带相关噪声的系统转化为带不相关白噪声的系统,然后再进行融合。
-
Sequential Covariance Intersection Fusion Kalman Filter for Multiple Time-delay Sensor Network Systems with Colored Noise(带有色噪声多重时滞传感网络系统的序贯协方差交叉融合Kalman滤波器) 将带有色噪声的系统转化为带相关噪声的系统,然后再进行融合。
????
2 运行结果
2.1 改进的CI融合估值器
带观测滞后多传感器系统的改进协方差交叉融合Kalman滤波器) 利用改进后的协方差交叉融合(ICI)方法实现对状态的估计,相较于原来的CI融合算法,可以提高精度


2.2 基于现代时间序列分析方法,对局部传感器构造ARMA信息模型,利用射影定理和白噪声估值器,得到局部状态估计,然后进行融合




2.3 带相关噪声多传感器时滞系统CI融合估值器
(带相关噪声多传感器多时滞系统的CI融合估值器) 为了避免噪声相关带来的推导上的复杂性,先将带相关噪声的系统转化为带不相关白噪声的系统,然后再进行融合





2.4 带有色噪声多传感器时滞系统CI融合估值器
(带有色噪声多重时滞传感网络系统的序贯协方差交叉融合Kalman滤波器) 将带有色噪声的系统转化为带相关噪声的系统,然后再进行融合




部分代码:
%-----------------滤波误差互协方差阵----------------%
P13(:,:,1)=eye(2);
for i=1:Bushu
PP13(:,:,i+1)=fai* P13(:,:,i)*fai'+gama*Qw*gama';%预报误差互协方差阵
%---滤波误差互协方差阵----%
P13(:,:,i+1)=[eye(2)-k1(:,i+1)*H01]*PP13(:,:,i+1)*[eye(2)-k3(:,i+1)*H03]'-[eye(2)-k1(:,i+1)*H01]*fai*P13(:,:,i)*H13'*k3(:,i+1)';P31(:,:,i+1)=P13(:,:,i+1)';
end
%-----------------按矩阵加权---------------%
for i=1:Bushu
Psigma(:,:,i)=[P1(:,:,i),P13(:,:,i);
P13(:,:,i)',P3(:,:,i)];
end
e=[eye(2),eye(2)]';
for i=1:Bushu
A(:,:,i)=inv(Psigma(:,:,i))*e*inv(e'*inv(Psigma(:,:,i))*e);
Pm(:,:,i)=inv(e'*inv(Psigma(:,:,i))*e);%误差方差阵
xmjian(:,i)=A(1:2,:,i)'*x1jian(:,i)+A(3:4,:,i)'*x3jian(:,i);
end
% t=1:Bushu;
% figure
% subplot(2,2,1);plot(t,x(1,t),'b',t,xmjian(1,t),'r:');
% subplot(2,2,2);plot(t,x(2,t),'b',t,xmjian(2,t),'r:');
%-----------------SCI----------------%
deta=0.0001;pp1=P1(:,:,Bushu);pp3=P3(:,:,Bushu);
[w13,Pci13]=y13_0618(deta,pp1,pp3)%pp1和pp3形成pci1
Pci13_=Pci13*(w13*w13*inv(pp1)*pp1*inv(pp1)+w13*(1-w13)*inv(pp1)*P13(:,:,Bushu)*inv(pp3)+...
w13*(1-w13)*inv(pp3)*P31(:,:,Bushu)*inv(pp1)+(1-w13)*(1-w13)*inv(pp3)*pp3*inv(pp3))*Pci13;
% P_13=[0.15 0.15;0.3 1];P_31=P_13';
rho=0.7;
P_13=rho*chol(pp1)'*chol(pp3);P_31=P_13';
Pcic13=Pci13*(w13*w13*inv(pp1)*pp1*inv(pp1)+w13*(1-w13)*inv(pp1)*P_13*inv(pp3)+...
w13*(1-w13)*inv(pp3)*P_31*inv(pp1)+(1-w13)*(1-w13)*inv(pp3)*pp3*inv(pp3))*Pci13;
for i=1:Bushu
xci13(:,i)=Pci13*(w13*inv(pp1)*x1jian(:,i)+(1-w13)*inv(pp3)*x3jian(:,i));
end
t=1:Bushu;
figure
subplot(2,2,1);plot(t,x(1,t),'b',t,xci13(1,t),'r:');
subplot(2,2,2);plot(t,x(2,t),'b',t,xci13(2,t),'r:');axis([0,Bushu,-45,20]);
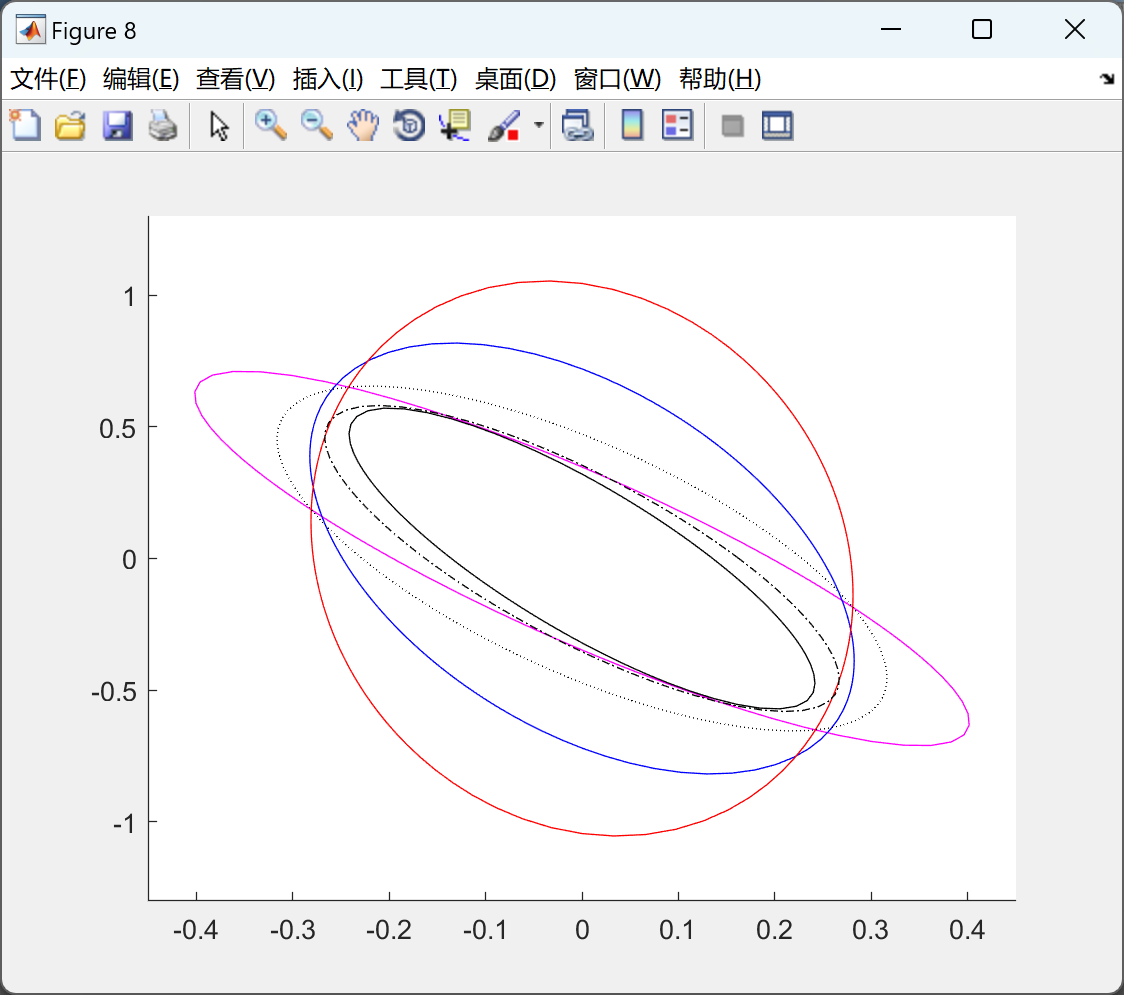
%-----------------椭圆半径----------------%
P1_ni=inv(P1(:,:,Bushu));P3_ni=inv(P3(:,:,Bushu));
Pm_ni=inv(Pm(:,:,Bushu));
Pci13_ni=inv(Pci13);Pci13__ni=inv(Pci13_);
Pcic13_ni=inv(Pcic13);
theta=0:pi/100:2*pi;
r1=1./sqrt(P1_ni(1,1)*cos(theta).^2+(P1_ni(1,2)+P1_ni(2,1))*cos(theta).*sin(theta)+P1_ni(2,2)*sin(theta).^2);
r3=1./sqrt(P3_ni(1,1)*cos(theta).^2+(P3_ni(1,2)+P3_ni(2,1))*cos(theta).*sin(theta)+P3_ni(2,2)*sin(theta).^2);
rm=1./sqrt(Pm_ni(1,1)*cos(theta).^2+(Pm_ni(1,2)+Pm_ni(2,1))*cos(theta).*sin(theta)+Pm_ni(2,2)*sin(theta).^2);
rci13=1./sqrt(Pci13_ni(1,1)*cos(theta).^2+(Pci13_ni(1,2)+Pci13_ni(2,1))*cos(theta).*sin(theta)+Pci13_ni(2,2)*sin(theta).^2);
rci13_=1./sqrt(Pci13__ni(1,1)*cos(theta).^2+(Pci13__ni(1,2)+Pci13__ni(2,1))*cos(theta).*sin(theta)+Pci13__ni(2,2)*sin(theta).^2);
rcic13=1./sqrt(Pcic13_ni(1,1)*cos(theta).^2+(Pcic13_ni(1,2)+Pcic13_ni(2,1))*cos(theta).*sin(theta)+Pcic13_ni(2,2)*sin(theta).^2);
%--------------作图----------------%
t=1:Bushu;
figure
hold on;
polar(theta,r1,'b');
polar(theta,r3,'b-.');
polar(theta,rm,'r');
polar(theta,rci13,'k');
polar(theta,rci13_,'k-.');
polar(theta,rcic13,'m');
????3
参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王军.时滞系统的协方差交叉融合估计[D].黑龙江大学,2017.
????
4 Matlab代码
实现