申明:这是一篇转载文章,本人害怕原链接失效,故转载,没有商用,作者也可也私我删除。
使用常见Matlab工具箱调节pid参数

小白的第一篇知乎文章,如果有不准确的地方,请各位大神多多指教。
前几天完成了自控大作业,正好总结一下。
题目如下:
自动控制原理项目设计
飞机垂直速度控制系统设计
垂直速度(又称升降速度)控制是现代自动飞行控制系统的重要模式,系统将按最优(或最省油)的垂直速度自动控制飞机的爬升或下降。在一些飞机上,已经将垂直速度控制系统作为纵向自动飞行控制系统的默认模式,改变了以俯仰角自动控制系统作为默认模式的传统。从动力学来看,对垂直速度的控制,若在飞行速度或空速不变的条件下,实际上就是对纵向轨迹角或航迹倾角的控制,而对轨迹角的控制是飞机驾驶的最终目标。从这一意义上来说,垂直速度控制系统成为纵向自动飞行控制系统的重要工作模式是容易理解的。但从固定翼飞机纵向运动的操纵实质来说,只能通过改变俯仰力矩来达到对垂直速度的控制。也就是说,航迹倾角或纵向轨迹角是无法通过升降舵的偏转直接达到改变的目的,而是需要通过对俯仰角的控制来间接达到对纵向轨迹倾角控制目的。因此,垂直速度控制系统的核心是俯仰角控制系统,将以此作为内回路来建立垂直速度控制系统。驾驶员通过自动飞行控制系统的模式/操作面板的旋钮来给定垂直速度指令,或由飞行管理计算机自动给出该指令。垂直速度的反馈信号可来自大气数据系统。
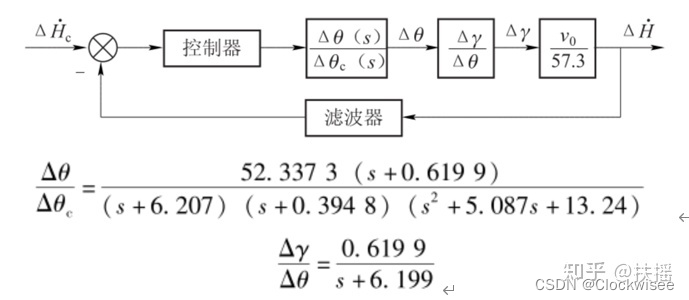
1.飞机的垂直速度控制系统模型
2.飞机垂直速度控制系统性能分析要求(用Matlab软件工具)
(1)用时域法分析系统的性能指标;
(2) 绘制系统的根轨迹图,并分析系统的稳定性;
(3)绘制出系统的对数频率特性并进行分析;报告要求:需要写出详细的传递函数推导过程,给出Matlab程序和运行结果,并进行分析。
3. 控制器设计
控制器设计要求:系统必须稳定;无稳态误差;超调量不超过20%;相位裕量大于30°。报告要求:需给出Matlab程序和运行结果及详细设计过程。
4. 分组

这就是一个PID调参的问题。Matlab提供了很多调节PID的工具箱,在这个作业里我使用了pidtool和sisotool两种工具箱来调参。
无论使用哪一种工具箱,首先要把未加控制器的传递函数先导入,我的学号是22,因此以PI控制器,V0取值为10为例,代码如下:
k1=[52.33731000.6199/57.3 52.33730.61990.6199*100/57.3];
d1=[1 6.207];
d2=[1 0.3948];
d3=[1 5.0873 13.24];
d4=[1 6.199];
d6=conv(d1,d2);
d7=conv(d6,d3);
d8=conv(d7,d4);
GG=tf(k1,d8);%未加控制器前的开环传递函数
运行后,在命令行窗口输入pidtool打开PID tuner,打开窗口如下图:
先点击左上角的Plant,再点击import导入传递函数GG,如下图:
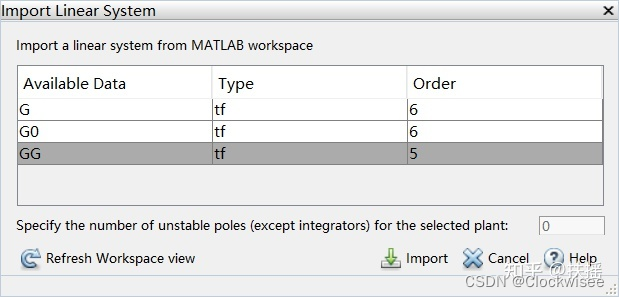
导入后,选择Type为PI,效果如下图所示:
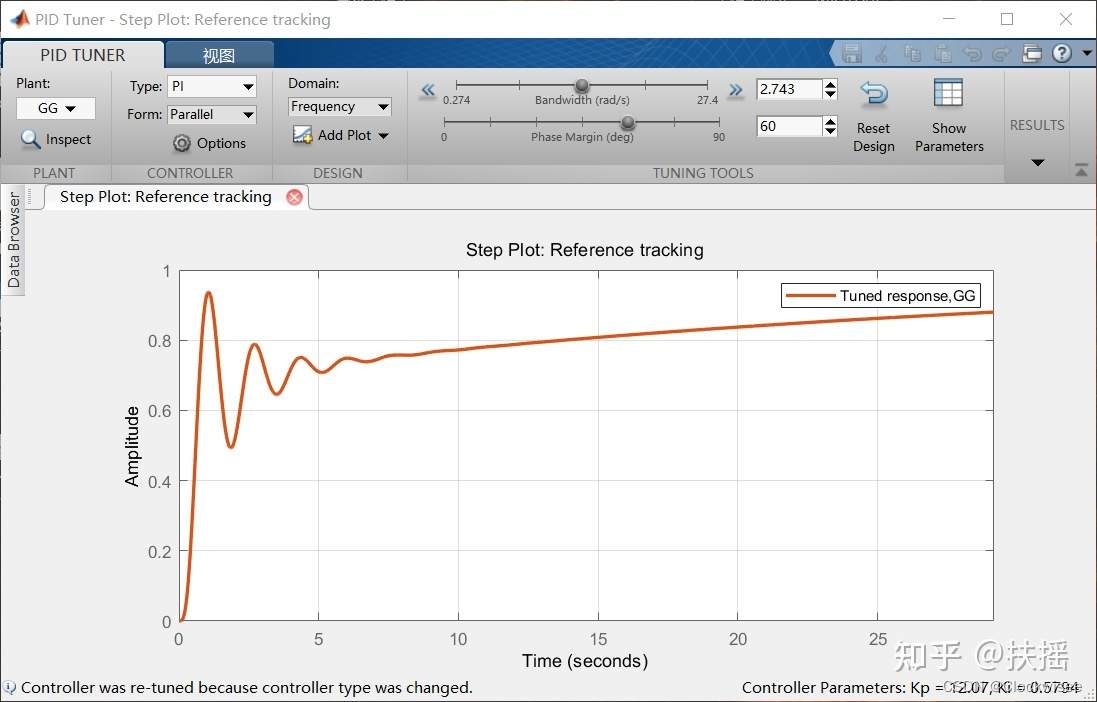
在Domain选项中可以选择调节时域还是频率,按题目要求:系统必须稳定;无稳态误差;超调量不超过20%;相位裕量大于30°。我只要调节相位裕量就可以了,稳定与否,稳态误差,超调量可以大致从图中看出来,调节后的效果如下:
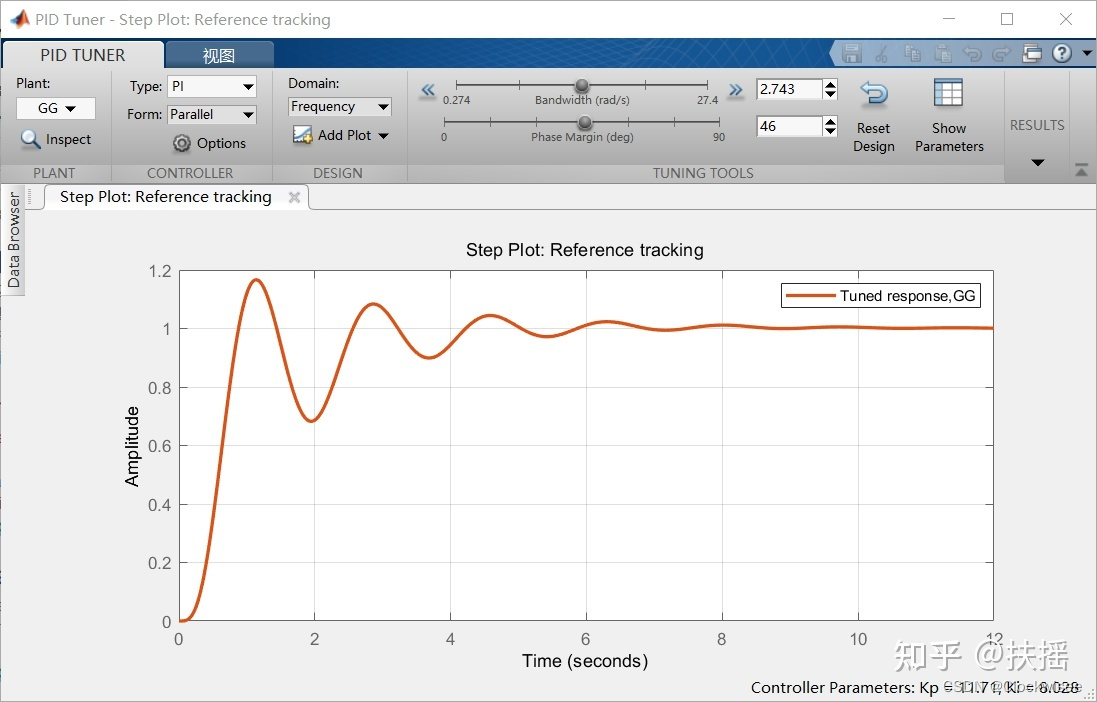
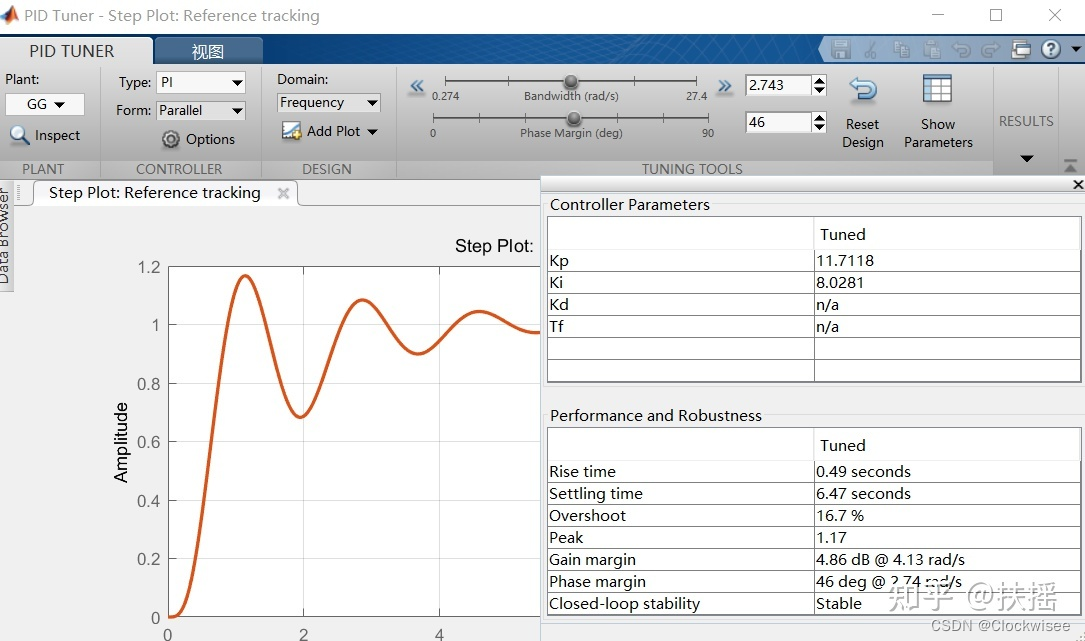
右下角是当前情况下,Kp和Ki的取值,也可以点击Show Parameters,查看更具体的参数,如下图:
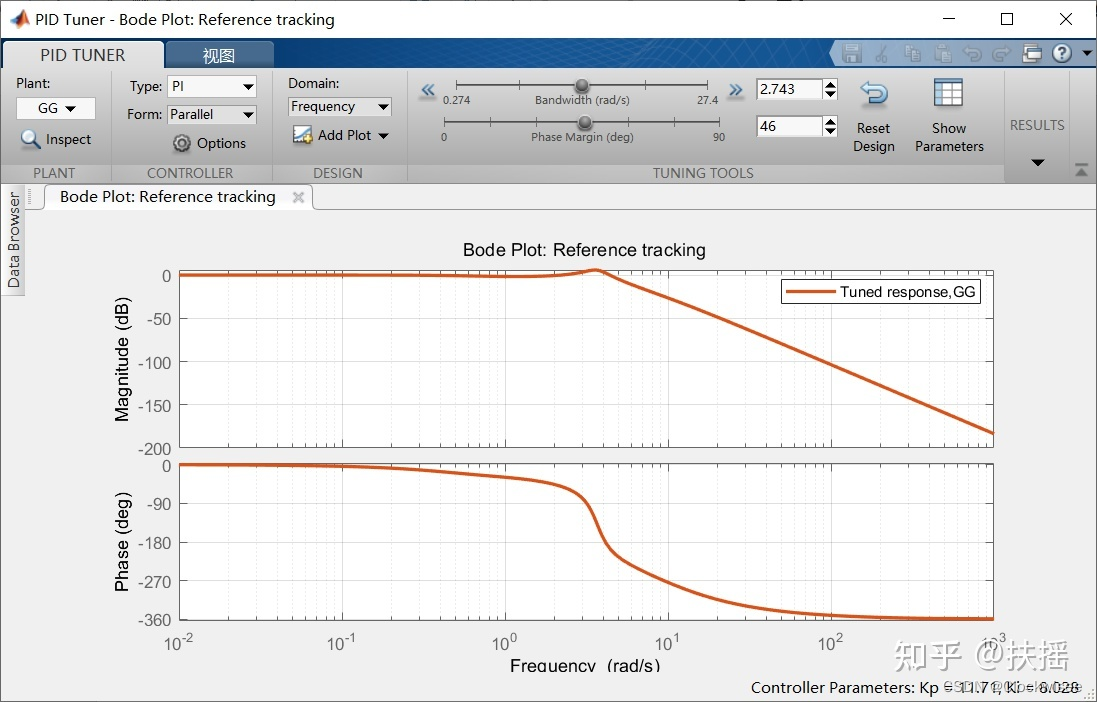
右击Plot Type,选择Bode,也可以查看系统伯德图,如下图:
也可以输入传递函数后,在命令行窗口输入sisotool,打开Control System Designer,打开后如下图:
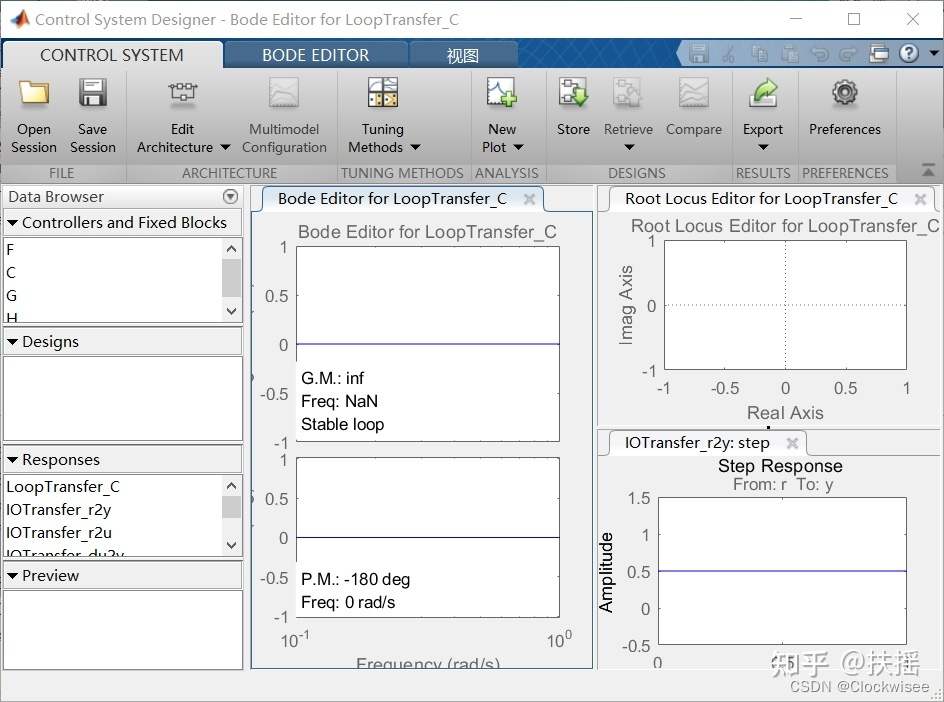
同样的,首先导入传递函数,具体操作如下图:
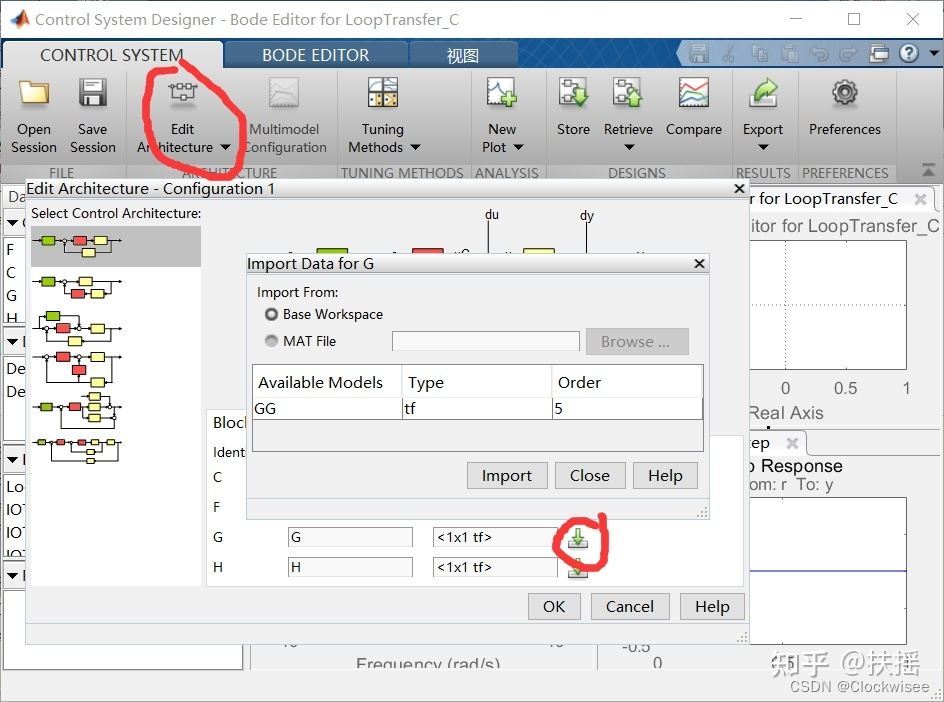
导入后的效果如下图:
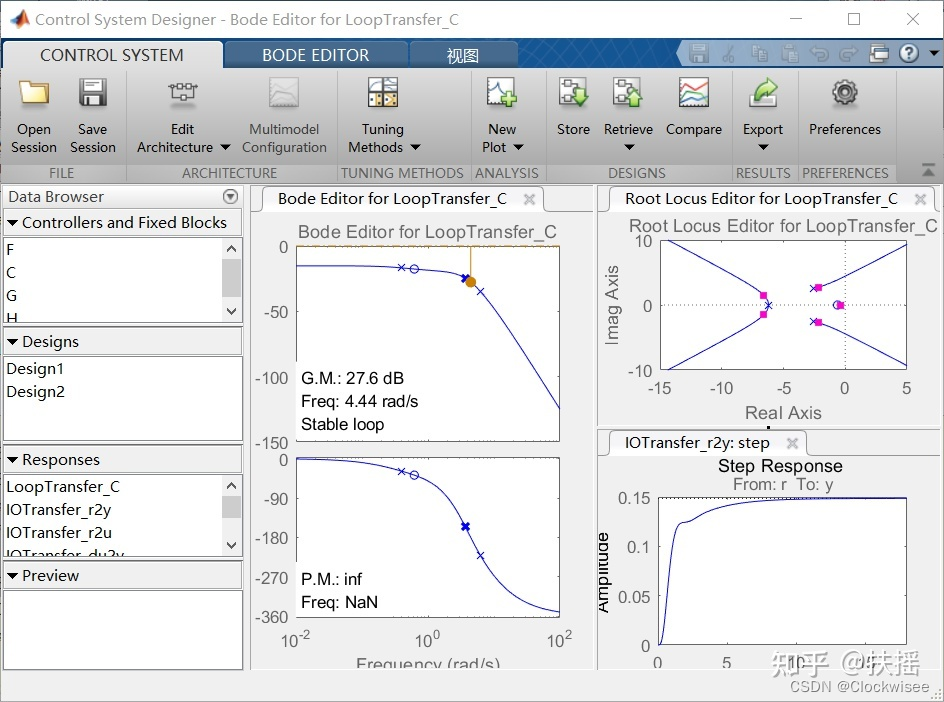
可以直接看到当前的伯德图,奈氏图和阶跃响应的图像。点击Tuning Methods,选择PID Tunner开始调参,同样的选择PI控制器,调节相位裕量,效果如下图:
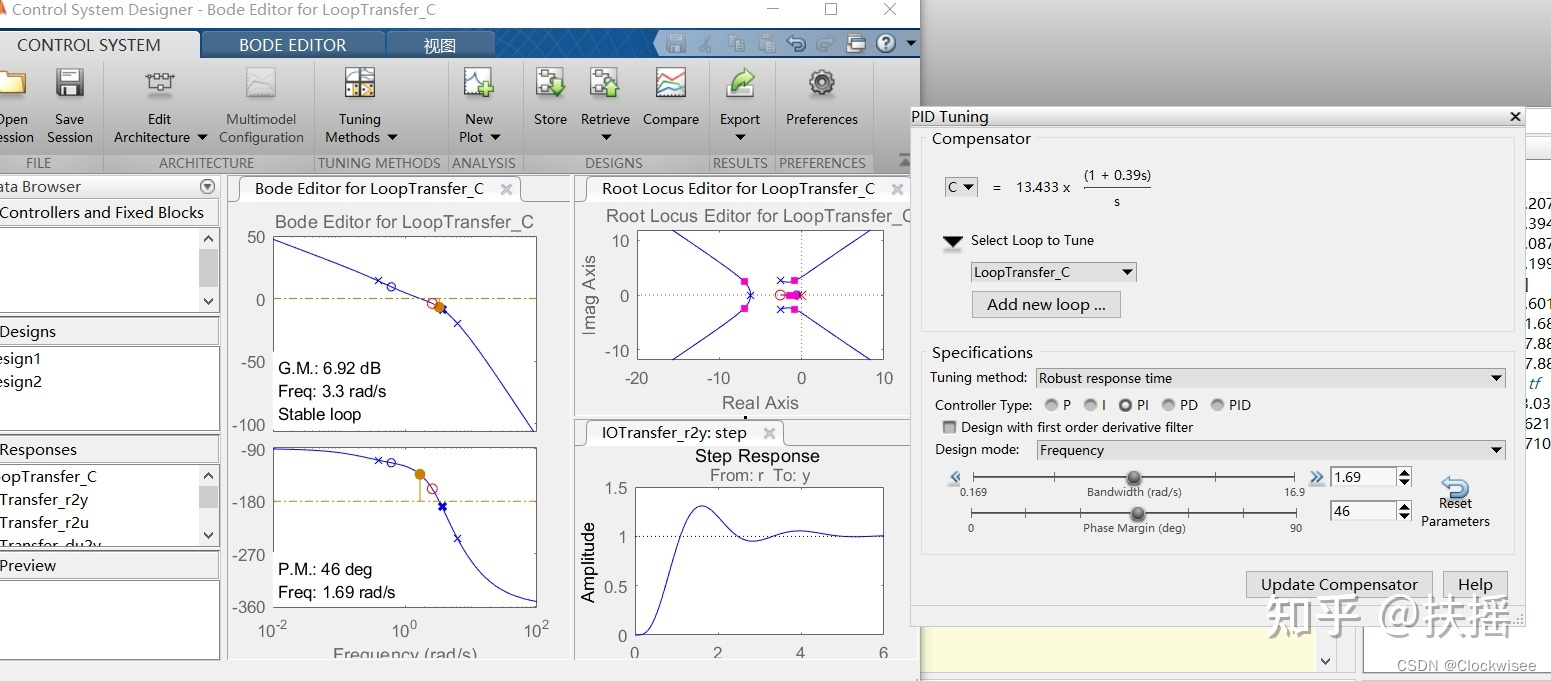
调节参数后,点击Update Compensator,左边的窗口中的图会根据调节的参数做相应变化,同时右边的窗口上方会显示当前Kp和Ki。
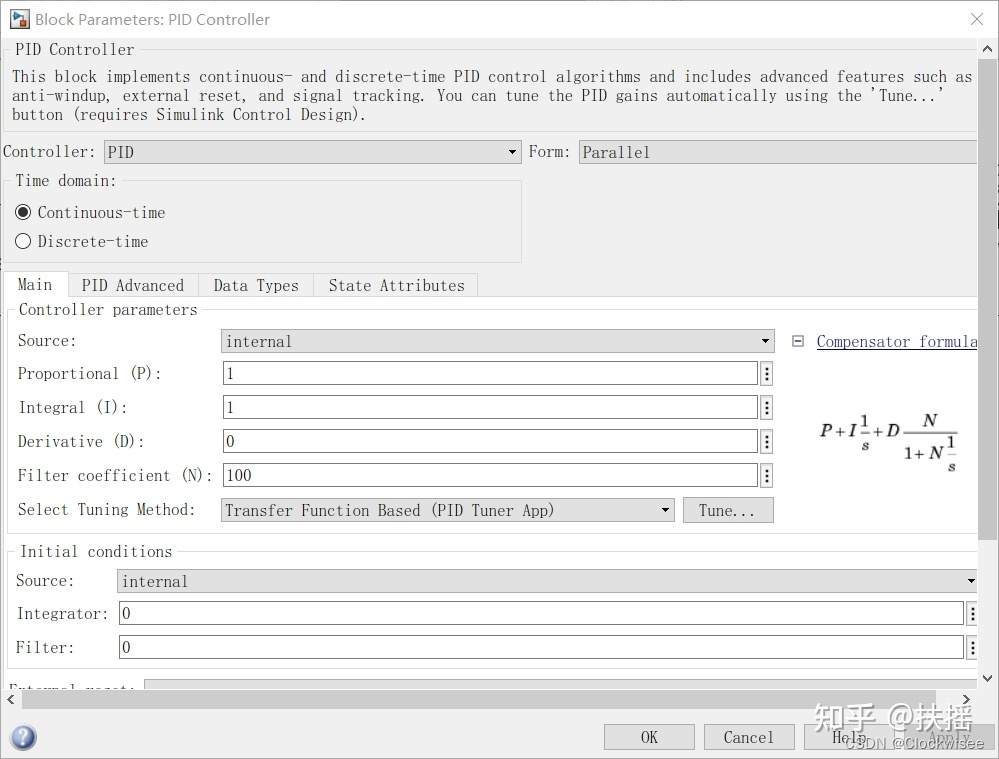
还有一种常见的方法是使用Simulink先构建函数,然后调参,如下图所示:

所有的框图都可以在上图标红的库找到,具体构建的过程就直接省略了。
构建好如上图的结构后,点击PID(s),如下图:
任意修改PID参数,先点击Apply,再点击Tune,如下图:
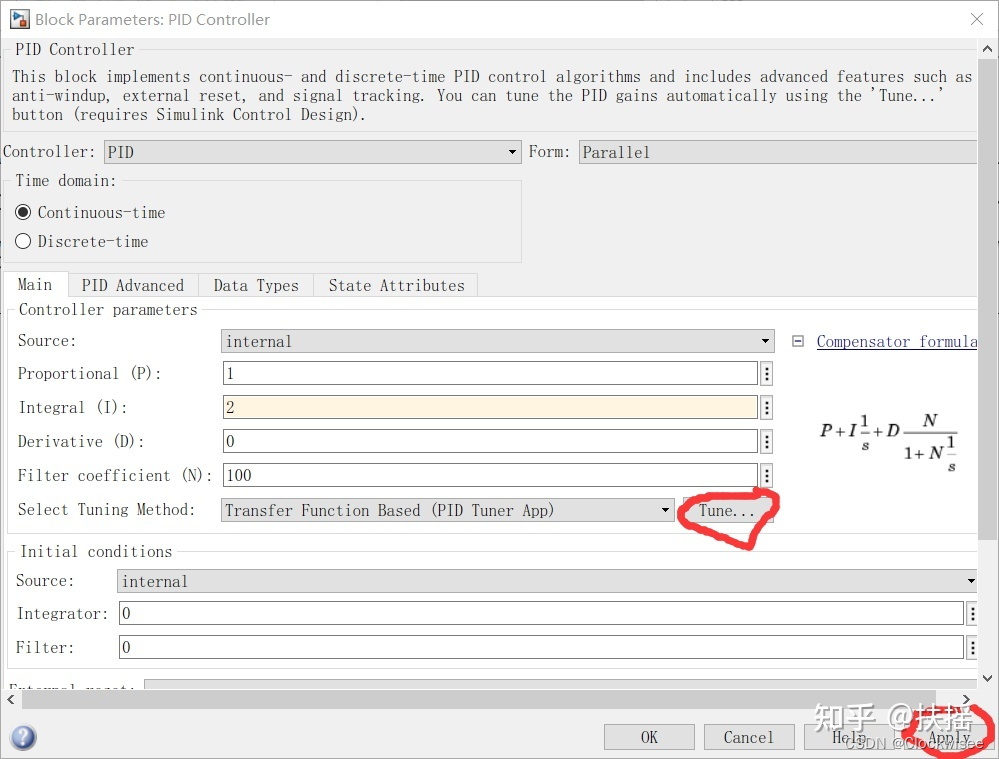
打开后,出现如下界面:
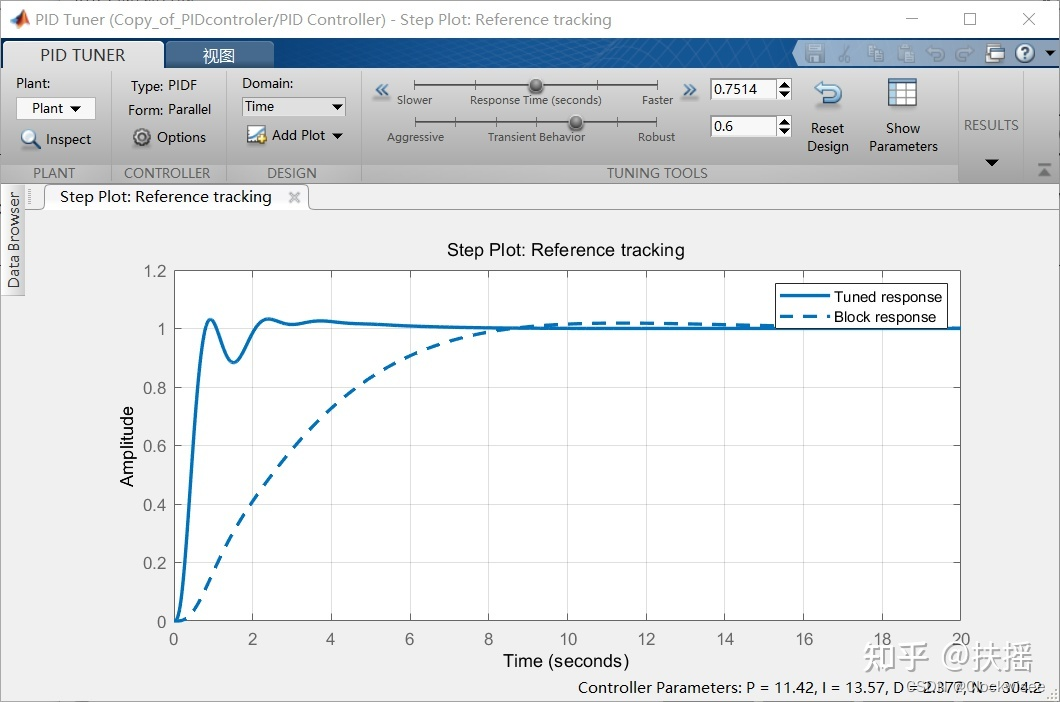
后续调节方法和前文一样,按下不表。综上,是我完成此处大作业的使用的一些工具,表面上花里胡哨,实际上都是使用的Matlab APP中的PID Tuner。部分参考以前知乎大佬的文章,可惜距离完成大作业已经过了一段时间,找不到参考了哪几篇文章,所以深感抱歉没能在下方提供参考链接。
作者:扶摇
链接:https://zhuanlan.zhihu.com/p/344144979
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)