基于个人安装时的操作以及所浏览的链接,仅供参考。
前言
使用ubuntu下载ros、px4似乎是一件十分繁琐以及困难的事情,但是本人经过了参考大量链接,成功安装好后,发现这件事情其实并非难事。许多安装指导链接发布于一两年前,也许在当时确实是一个好方法,但时至今日,很多操作步骤已然删繁就简,成为一件易事了。
提示:以下是本篇文章正文内容,下面案例可供参考
一、安装ROS1
具体操作来自于ROS官网http://wiki.ros.org/cn/noetic/Installation/Ubuntu#A.2BXwBZy1uJiMU-
1.1 设置sources.list
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
1.2 设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
1.3 开始安装
1.3.1 确保软件包索引最新
sudo apt update
1.3.2 完整桌面版安装
sudo apt install ros-noetic-desktop-full
1.3.3 设置环境
source /opt/ros/noetic/setup.bash
执行以下代码可一劳永逸,之后编程无需再设置环境
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
至此,ros已经安装完成。(可参考古月居入门21讲进行测试。)
二、安装PX4
1.下载git代码
整理自https://zhuanlan.zhihu.com/p/438147439
很多链接说子项目下载很慢,但其实现在下载也已经很快了,直接按照官网给出的指令即可。
代码如下:
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
2.运行bash
代码如下:
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
运行完之后,请重启ubuntu
sudo reboot now
对PX4进行一下简单的测试(在PX4-Autopilot路径下执行)
make px4_sitl jmavsim
如果观察到下图所示,即是成功了。
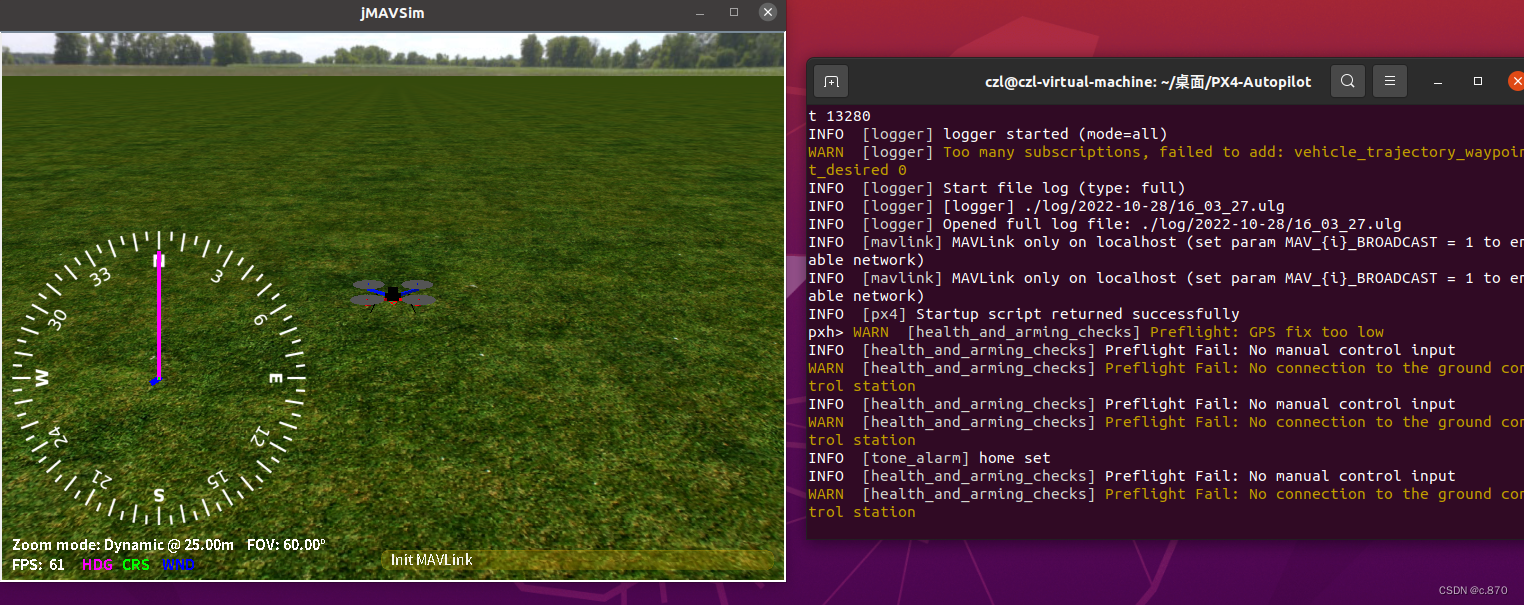
按照官方内容,进行一些安装操作(在PX4_Autopilot路径下执行)
make px4_fmu-v5_default
make px4_sitl gazebo
三、安装MAVROS
1 按照古月居ros入门21讲中的第九讲创建一个catkin_ws文件
2 在catkin_ws路径下执行以下代码
catkin init
wstool init src
3 执行完成后继续执行
sudo apt-get install python-catkin-tools python-rosinstall-generator -y
rosinstall_generator --rosdistro noetic mavlink | tee /tmp/mavros.rosinstall
4 开始安装最新版mavros
rosinstall_generator --upstream-development mavros | tee -a /tmp/mavros.rosinstall
5 创建工作区
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
6 安装地理图书馆数据、构建源代码
./src/mavros/mavros/scripts/install_geographiclib_datasets.sh
catkin build
7 确保从工作区安装程序(注:执行下列代码后,rosrun将会失效。)
source devel/setup.bash
四、安装QGroundControl
参考以下链接的ubuntu linux部分https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html
五、测试
可参考https://zhuanlan.zhihu.com/p/438699349
总结
以上就本篇文章所有的内容了,以上所有内容来源于各种官方文件以及参考链接且无盈利目的,仅作为学习交流之用,如有侵权,请联系本人删除!
最后,愿与诸君共勉。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)