1、可以订阅在rviz上的点的坐标

2、正文
RIVE 上的设置:
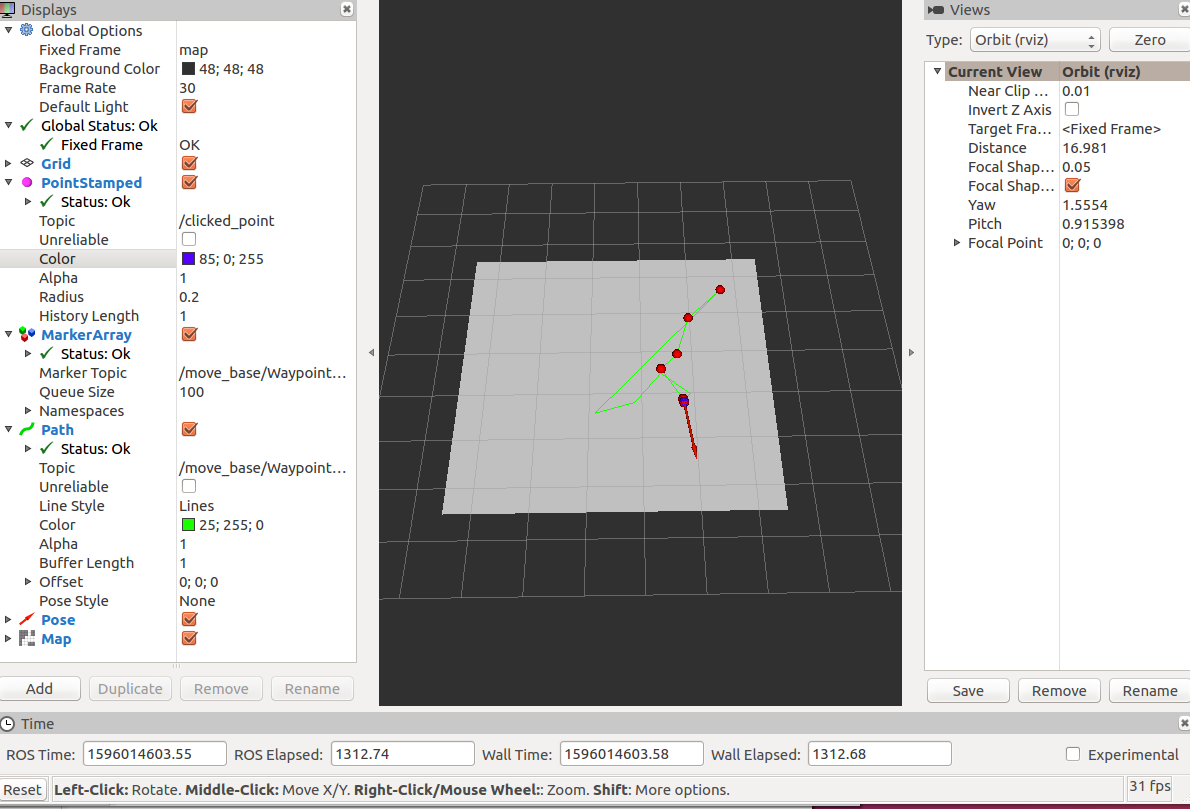
这样子来添加上面的各项

注意的地方:
publish point 是不能在空白的地方点的,点了没有反映,所以要把Map显示出来,在地图上面点
原来riviz是有设置文件的,下边的代码可以作为参考
Panels:
- Class: rviz/Displays
Help Height: 84
Name: Displays
Property Tree Widget:
Expanded:
- /Status1
- /Grid1
- /TF1/Frames1
- /TF1/Tree1
- /LaserScan1
- /Global Map1/Planner1
- /Local Map1/Planner1
- /Local Map1/Trajectory Cloud1
Splitter Ratio: 0.5
Tree Height: 497
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: LaserScan
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: false
base_link:
Value: true
camera_depth_frame:
Value: true
camera_depth_optical_frame:
Value: true
camera_link:
Value: true
camera_rgb_frame:
Value: true
camera_rgb_optical_frame:
Value: true
imu_link:
Value: true
map:
Value: true
odom:
Value: true
scan:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: false
Tree:
map:
odom:
base_link:
scan:
{}
imu_link:
{}
Update Interval: 0
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/LaserScan
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 1230
Min Color: 0; 0; 0
Min Intensity: 6
Name: LaserScan
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.0500000007
Style: Squares
Topic: /scan
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 0.699999988
Class: rviz/Map
Color Scheme: map
Draw Behind: false
Enabled: true
Name: Map
Topic: /map
Unreliable: false
Use Timestamp: false
Value: true
- Class: rviz/Group
Displays:
- Alpha: 0.699999988
Class: rviz/Map
Color Scheme: costmap
Draw Behind: true
Enabled: true
Name: Costmap
Topic: /move_base/global_costmap/costmap
Unreliable: false
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz/Path
Color: 255; 0; 0
Enabled: true
Head Diameter: 0.300000012
Head Length: 0.200000003
Length: 0.300000012
Line Style: Lines
Line Width: 0.0299999993
Name: Planner
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.0299999993
Shaft Diameter: 0.100000001
Shaft Length: 0.100000001
Topic: /move_base/DWAPlannerROS/global_plan
Unreliable: false
Value: true
Enabled: true
Name: Global Map
- Class: rviz/Group
Displays:
- Alpha: 0.699999988
Class: rviz/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Costmap
Topic: /move_base/local_costmap/costmap
Unreliable: false
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz/Path
Color: 0; 12; 255
Enabled: true
Head Diameter: 0.300000012
Head Length: 0.200000003
Length: 0.300000012
Line Style: Lines
Line Width: 0.0299999993
Name: Planner
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.0299999993
Shaft Diameter: 0.100000001
Shaft Length: 0.100000001
Topic: /move_base/DWAPlannerROS/local_plan
Unreliable: false
Value: true
- Alpha: 0.800000012
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: total_cost
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 785.049988
Min Color: 0; 0; 0
Min Intensity: 29.3899994
Name: Cost Cloud
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.0399999991
Style: Flat Squares
Topic: /move_base/DWAPlannerROS/cost_cloud
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: total_cost
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 9.62100029
Min Color: 0; 0; 0
Min Intensity: 3.62100005
Name: Trajectory Cloud
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.0399999991
Style: Flat Squares
Topic: /move_base/DWAPlannerROS/trajectory_cloud
Unreliable: false
Use Fixed Frame: true
Use rainbow: false
Value: true
Enabled: true
Name: Local Map
- Alpha: 1
Arrow Length: 0.200000003
Axes Length: 0.300000012
Axes Radius: 0.00999999978
Class: rviz/PoseArray
Color: 0; 192; 0
Enabled: true
Head Length: 0.0700000003
Head Radius: 0.0299999993
Name: Amcl Particle Swarm
Shaft Length: 0.230000004
Shaft Radius: 0.00999999978
Shape: Arrow (Flat)
Topic: /particlecloud
Unreliable: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz/Path
Color: 25; 255; 0
Enabled: true
Head Diameter: 0.300000012
Head Length: 0.200000003
Length: 0.300000012
Line Style: Lines
Line Width: 0.0299999993
Name: Full Plan
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.0299999993
Shaft Diameter: 0.100000001
Shaft Length: 0.100000001
Topic: /move_base/NavfnROS/plan
Unreliable: false
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz/MoveCamera
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/Select
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/Measure
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Angle: -8.10503006
Class: rviz/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Name: Current View
Near Clip Distance: 0.00999999978
Scale: 76.6311035
Target Frame: <Fixed Frame>
Value: TopDownOrtho (rviz)
X: -1.35336006
Y: 2.04397988
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 716
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a00000286fc0200000005fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000002800000286000000dd00ffffff000000010000010f00000286fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000002800000286000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004a00000003efc0100000002fb0000000800540069006d00650000000000000004a00000030000fffffffb0000000800540069006d00650100000000000004500000000000000000000002900000028600000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1301
X: 65
Y: 24
代码见github

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)