参考文章:
文章一
文章二
这两篇文章多多少少和自己的有点不一样,故在此记录。以实际为准。
从官网https://github.com/IntelRealSense/librealsense下载安装包(用git的方式),解压后打开终端,进入根目录。
注意:如果之后要用realsense-ros,那么下载librealsense就要注意了!librealsense和realsense-ros的版本有对应关系,体现在realsense2_camera功能包的cmakelists里面有写要找哪个版本的librealsense。
官网提供了两种安装方式,一种是从源上添加再安装,一种是从源码编译安装,本文采用源码编译安装。
卸载方式则取决于是通过源码编译安装的还是apt安装的,源码编译安装的就是sudo make uninstall然后删掉文件夹就可,apt安装的就sudo apt remove那个包的名字就行。
1、源码安装 librealsense
更新源
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
安装依赖
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
运行Intel Realsense 的许可脚本
./scripts/setup_udev_rules.sh
下载并编译内核模块
./scripts/patch-realsense-ubuntu-lts.sh
编译安装
mkdir build && cd build
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
sudo make uninstall && make clean && make -j8 && sudo make install
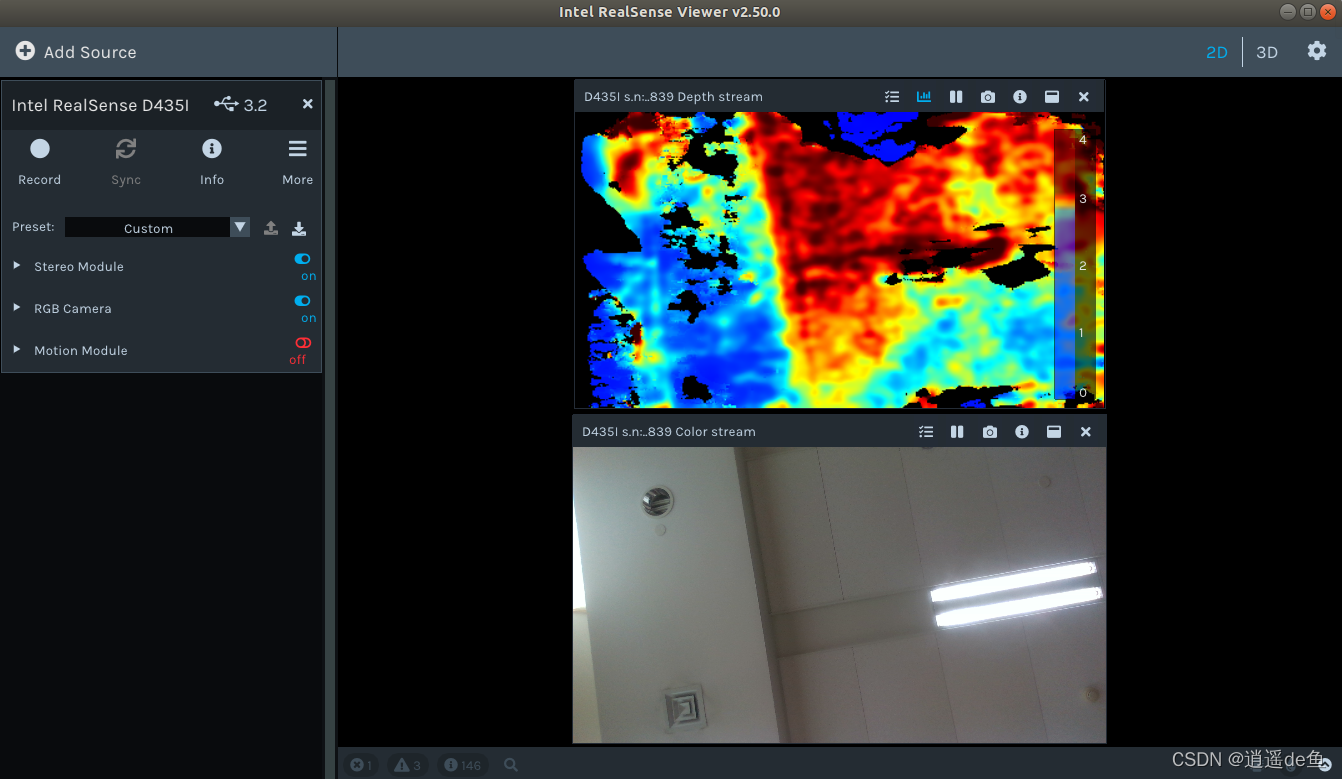
安装成功后,命令行输入realsense-viewer,把相机插上,显示如下图片即可。
注意:一定要插在电脑usb3.0插口处!
2、源码编译 realsense-ros
再次提醒:librealsense和realsense-ros的版本有对应关系,体现在realsense2_camera功能包的cmakelists里面有写要找哪个版本的librealsense。
创建工作空间
mkdir -p ~/catkin_ws/src && cd ~/catkin_ws/src
下载源码
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
编译
catkin_make
接下来就是拿到相机,实际操作试试。
source ./devel/setup.bash
启动相机节点
roslaunch realsense2_camera rs_camera.launch
此时打开终端,显示话题,这样就成功了(泪目)

注意,roslaunch和realsense-viewer这两句命令有冲突,不要两个一起运行,否则会报错的。
https://blog.csdn.net/Wolf_AgOH/article/details/122654928
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)