ros 与 matlab 通讯使用的是ros中的主从机策略。
1 准备条件
1、首先我们需要在matlab上安装 “Robotics_System_Toolbox” 工具箱,matlab2015B及以后自动安装有这个工具箱,但是可能由于激活的缘故,使得在输入rosinit 命令的时候会出现 “Undefined function or variable 'rosinit’ ”
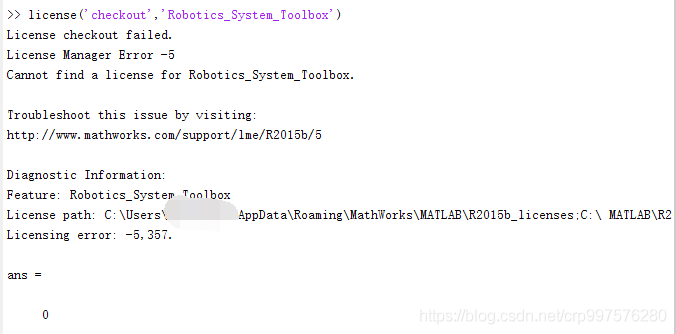
这时候你可以使用如下命令检查你的license是否正确:
license('checkout','Robotics_System_Toolbox')
如果出现以下的信息(返回信息为0),则说明你的license有问题,你需要重新激活。或者一个简单的方法就是 “重装MATLAB2016”
我自己按卸载了matlab2015B 版本然后安装的2016B版本解决的;然后输入rosinit 命令,正常会输出以下信息

2、主从机通讯
首先确保运行matlab的电脑和运行Ubuntu的电脑连接在同一个局域网内。
2.1 Ubuntu 端设置
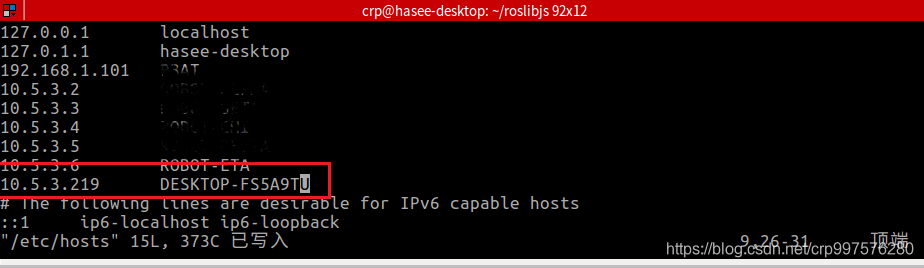
1、修改/etc/hosts文件 添加运行matlab端电脑的IP地址,比如说我的电脑名称为“DESKTOP-FS5A9TU”, IP 地址为10.5.3.219。 在etc/hosts文件中添加 "10.5.3.219 DESKTOP-FS5A9TU "
sudo vim /etc/hosts
2、在Ubuntu端新开一个终端运行 roscore
roscore
2.2 matlab端设置
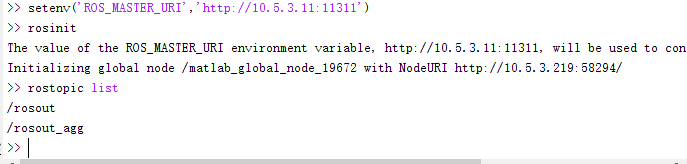
在matlab端输入:(设置ROS主机的IP地址为Ubuntu端电脑的IP)
setenv('ROS_MASTER_URI','http://10.5.3.11:11311')
rosinit
然后再用rostopic list 命令查看话题名称:
rostopic list
这时候就可以看大有一个‘/rosout’ 和‘/rosout_agg’的话题:
你可以在matlab端使用命令 “help robotics.ros” 来查看相关命令
help robotics.ros
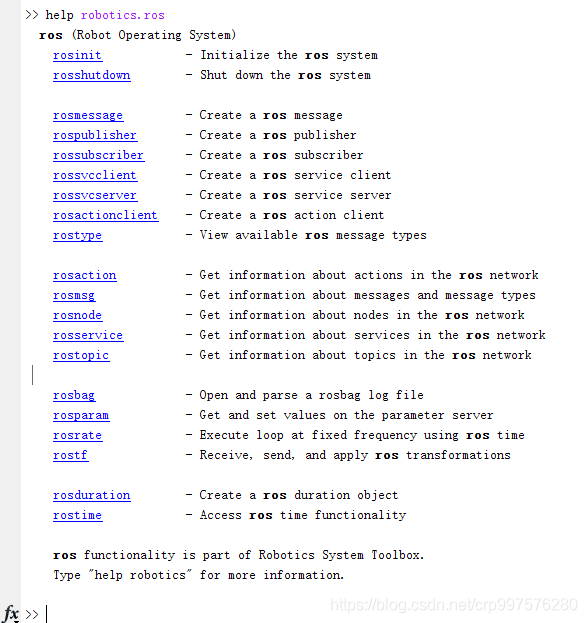
这里面有两个常用的命令是:
- rosinit ——表示启动ROS
- rosshutdown ——表示关闭ROS
3 用例测试
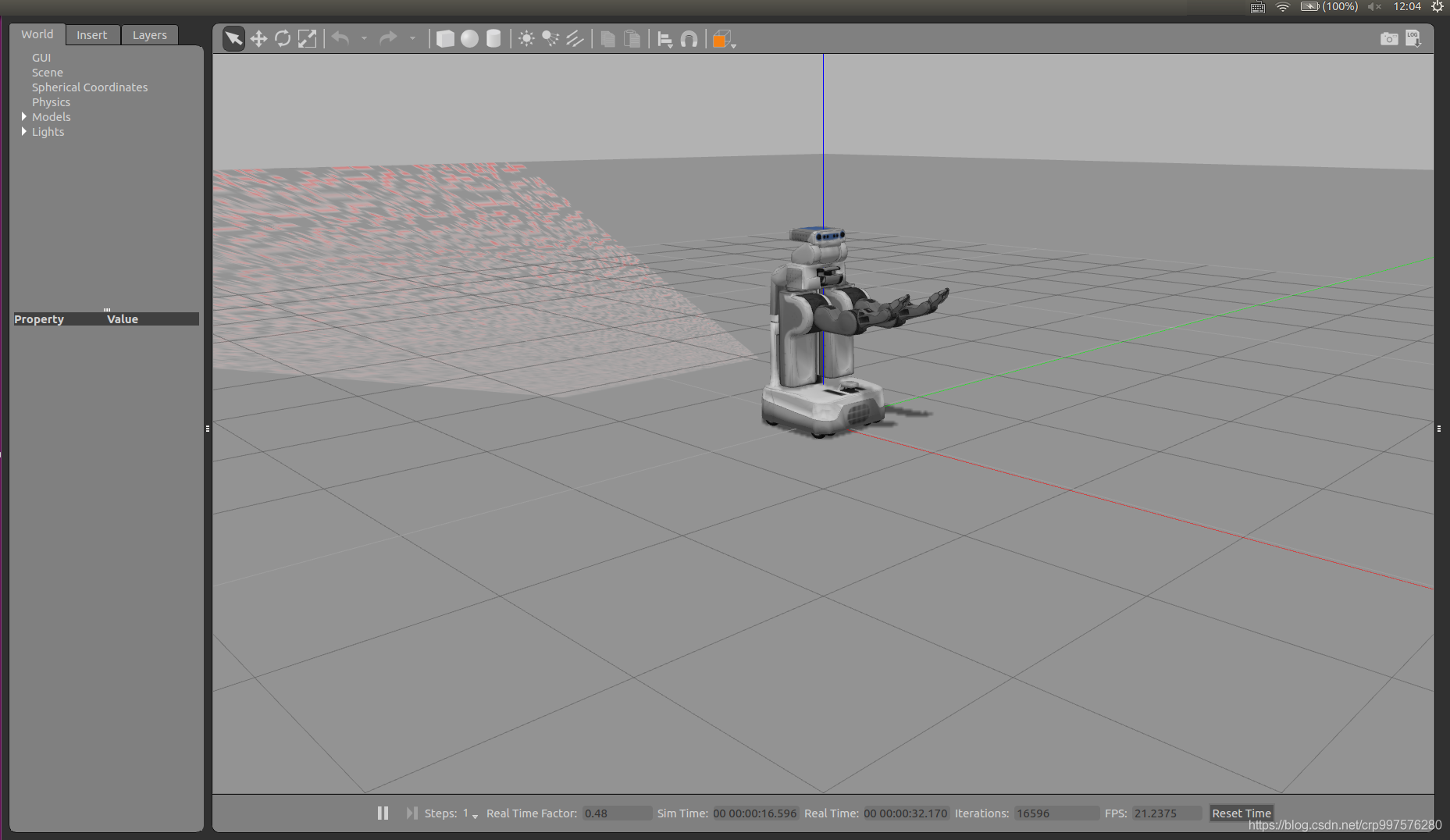
接下来我们在Ubuntu端启动一个pr2机器人,然后实现在MATLAB端接收显示pr2机器人的传感器数据,同时发布控制命令道/cmd_vel 话题上控制pr2机器人运行。
1、在Ubuntu端启动pr2机器人
roslaunch pr2_gazebo pr2_empty_world.launch
2、matlab 端首先设置ROS主机为ubuntu 端的电脑,然后在matlab中初始化ros,最后利用rostopic list 查看主机上发布的话题。
setenv('ROS_MASTER_URI','http://10.5.3.11:11311')
rosinit
rostopic list
启动以后我们可以看到matlab端已经可以正确显示pr2发布的topic了。
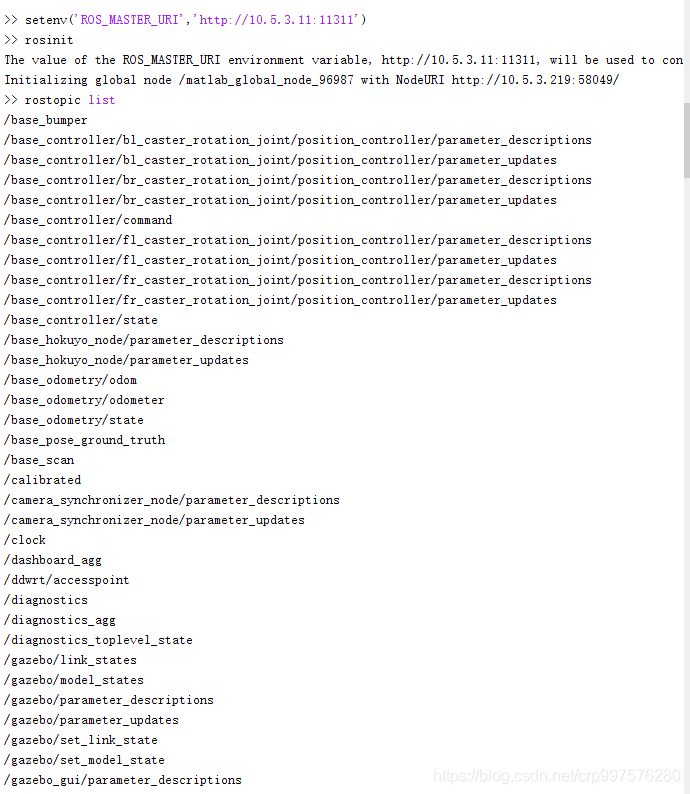
一些常用的topic命令都可直接在matlab中使用,如 rostopic list 、rostopic info 、 rostolic echo
1)列出topic列表
rostopic list
2)查看topic 信息
rostopic info /torso_lift_imu/data
3)打印topic 信息
rostopic echo /torso_lift_imu/data
3、接收消息
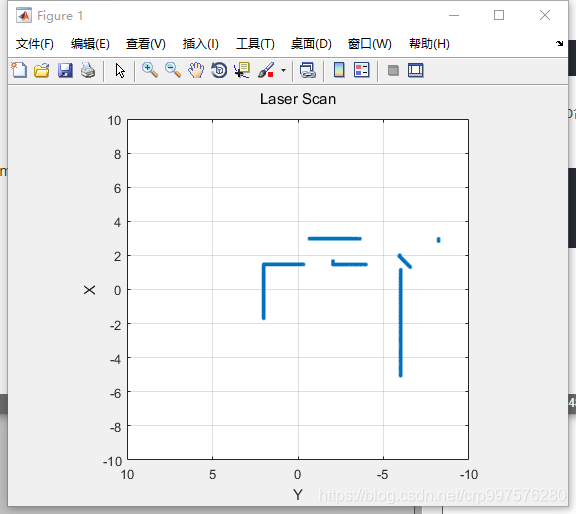
接下来我们接收并显示PR2发布的激光雷达数据。ROS 在matlab中接收一个topic的函数是 rossubscriber(topic_name,@function), 与ros中的接收函数不同,在matlab中我们不需要指定这个话题的数据类型,它会自动检测消息类型。function 表示回调函数,可以指定回调函数,也可以缺省。接下来我们在matlab命令窗口中输入:
>> laser = rossubscriber('/base_scan');
>> scandata = receive(laser,10);
>> plot(scandata)
既可以看到如下效果:
4、发布消息
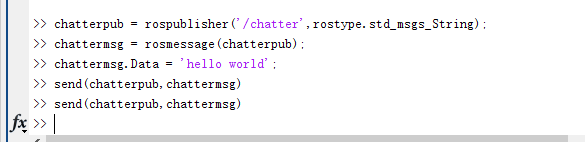
1)创建一个发布器
chatterpub = rospublisher('/chatter',rostype.std_msgs_String);
2)填充数据
chattermsg = rosmessage(chatterpub);
chattermsg.Data = 'hello world';
send(chatterpub,chattermsg)
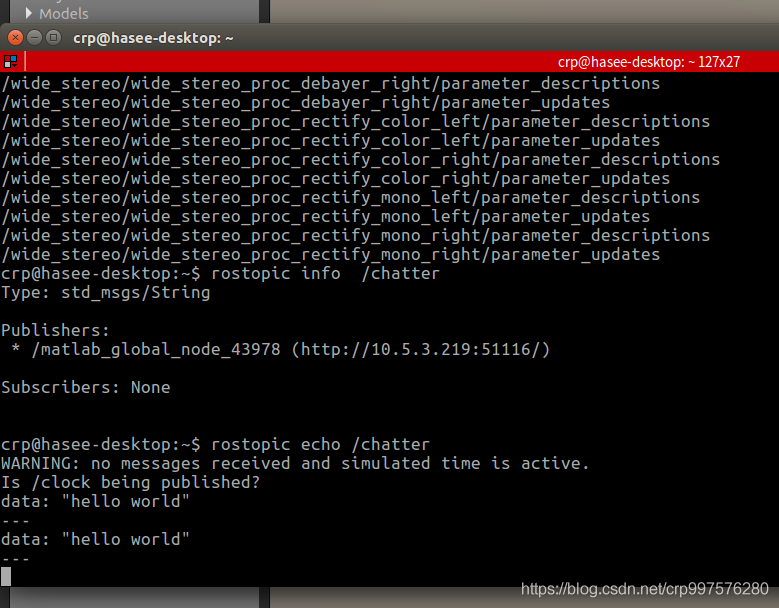
3)我们在ROS主机上运行
rostopic echo /chatter
每当我们在matlab端调用一次 “send(chatterpub,chattermsg)” 函数,在ROS端就会打印一次 “hello world”
小结:到此我们在matlab上成功安装了ROS插件,并将matlab作为从机接收了ROS主机的话题上的数据,并在matlab端创建了一个新的话题,并将数据通过该话题发送到了ROS端。
4、参考资料
ROS探索总结(三十五)——Matlab中的ROS:http://www.guyuehome.com/1006
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)