Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
基于深度学习的SLAM概述
2023-05-16
目的
本博客总结最近看的几篇关于深度学习的SLAM以及基于深度学习的稠密重建,简要对比记录特点
对比
年份
名称
类型
框图
前端
输出
地图
方法
特点
回环
2022
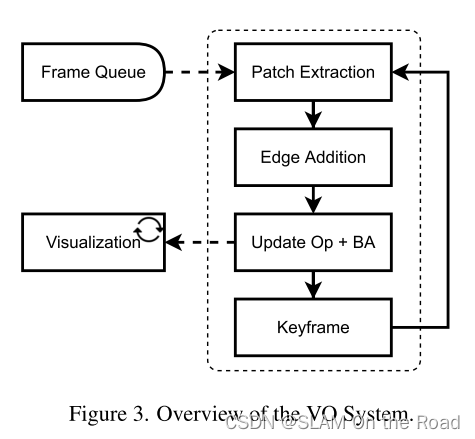
DPVO
mono-VO
VO
每一帧的pose和paches转到3D坐标系下的3D点,稀疏点云
稀疏3D点云拼接
提取每张图的feature_map, 随机提取多个patch + 根据初始位姿投影到滑窗内的其余帧 + 网络迭代找到匹配点target + 每个patch投影到其余帧,和对应的匹配点target构成重投影误差,BA优化滑窗内帧的位姿和匹配点target的位置+ patch为二维块,其中心对应的逆深度,加上当前帧的pose,可以转为3D点云。
patch匹配时考虑了局部特征和context特征,BA优化时候,也优化patch轨迹,即2D匹配点位置
没有回环
2022
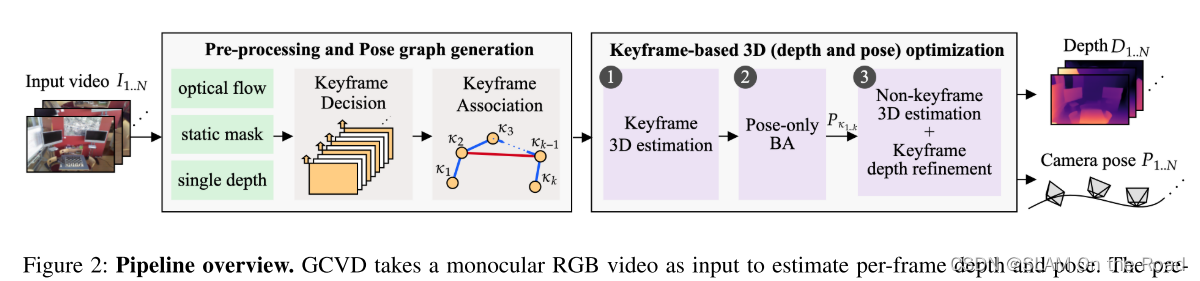
GCVD
mono-sfm
RAFT稠密光流, MASK-CNN剔除动态物体
视频流的所有相机位姿和稠密深度图像
没有建图
RAFT稠密光流相邻帧的相对pose+MSCK-CNN语义剔除动态物体+MiDAS估计深度先验+光流视差筛选关键帧+深度特征聚合关键帧,并稠密光流计算相对pose+构建带权重的pose-graph+ 仅优化pose的BA + 网络固定pose, 优化关键帧和非关键帧的深度(代价方程:两帧之间的投影光度误差+光流一致性+地图一致性)
全局一致性
有
2022
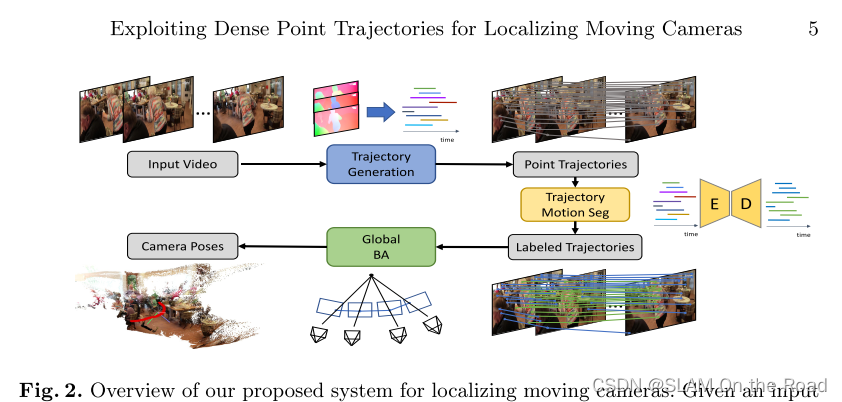
ParticleSfM
mono-sfm
RAFT连续跟踪多帧
sfm地图和相机pose
全局sfm稠密特征点地图
RAFT稠密光流连续跟踪+光流剔除动态物体+光流多帧构建track+ 全局sfm BA
动态物体剔除,网络泛化好
没有回环,类似滑窗光流SLAM
2021
DROID-SLAM
mono-VSLAM
全图像素点+稠密光流匹配
输出每个关键帧的位姿和稠密深度图像
全局场景稠密点云地图
RAFT稠密光流+稠密BA+重投影误差
GPU显存占用较大(前端实时需要8GGPU显存,后端由于需要存储所有图像的featuremap,因此,显存占用会很大,5000帧需要24GB),位姿和全局地图精度高
遍历全部关键帧构建帧图
2021
CodeMapping
Mapping
基于稀疏特征SLAM
输出每个关键帧的位姿和稠密深度图像
全局3D TSDF模型
稀疏基于特征法得到的关键帧位姿,稀疏点云,稀疏点的平均重投影误差,VAE估计初始带有不确定度的稠密深度图像+多帧优化当前帧的稠密深度
与稀疏SLAM(ORBSLAM3)并行,不直接优化深度像素点,优化一个深度code
回环依靠稀疏SLAM保证,多帧优化时不优化关键帧位姿,仅优化深度code。
2021
TANDEM
Mono-VSLAM
稠密直接法,采用TSDF中投影到当前帧的较稠密深度
输出每个关键帧的位姿和稠密深度图像
TSDF稠密建图
稠密深度图像直接法前端+ 稀疏梯度点关键帧滑窗BA后端,类似DSO
类似DSO
没有回环和全局BA,实时VO位姿和多帧MVS融合的关键帧稠密深度图像
2020
DeepFactors
Mono-VSLAM
整张图像的LK光流,跟踪上一个关键帧
输出每个关键帧的位姿和稠密深度图像
全局场景稠密点云地图
整张图像稠密LK光流前端跟踪+滑窗内因子图优化关键帧的pose和深度编码code(光度误差,重投影误差因子,稀疏几何因子)+BRISK描述子,词袋闭环检测
深度编码重建的稠密深度不准确
BRISK描述子回环,因子图增加边。
2021
CodeVIO
Mono-VIO
稀疏点跟踪MSCKF-VIO
输出每个关键帧的位姿和稠密深度图像
局部场景稠密点云地图
MSCKF-VIO + MSCKF优化深度编码(稀疏点云和灰度图像生成关键帧初始深度编码)
局部点云,且点云不准,位姿精度依靠VIO精度
没有回环
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
基于深度学习的SLAM概述 的相关文章
TM4C123G学习记录(7)--输入捕获
因为想申请 CSDN 博客认证需要一定的粉丝量 xff0c 而我写了五年博客才 700 多粉丝 xff0c 本文开启关注才可阅读全文 xff0c 很抱歉影响您的阅读体验 为了准备电赛临时学一下TM4C123G xff0c 简单记录学习内容大
ANO匿名飞控分析(1)— 遥控器解码
准备电赛 xff0c 简单写一下匿名飞控的分析基于TM4C主控的匿名拓空者飞控 xff0c 介绍见匿名科创 匿名拓空者PRO TI版全开源飞控使用入门 TM4C123 文章目录 一 简介二 PWM信号模式1 介绍2 硬件连接 三 PPM信号
OLAP分析引擎Druid配置文件详解(五):MiddleManager配置文件
摘要 xff1a 本文是Druid配置文件系列博文的第五篇 xff0c 我们将继续逐个介绍Druid的五大组件 xff0c 本文将开始介绍Data Server中的middle manager和peon组件 以下配置都在middleMana
ANO匿名飞控分析(2)— 任务调度
准备电赛 xff0c 简单写一下匿名飞控的分析基于TM4C主控的匿名拓空者飞控 xff0c 介绍见匿名科创 匿名拓空者PRO TI版全开源飞控使用入门 TM4C123 一 简介 匿名飞控的任务调度还是比较简单的 xff0c 没有操作系统什么
点云地面点滤波(Cloth Simulation Filter, CSF)“布料”滤波算法介绍
本篇博客参考Wuming Zhang的文章 An Easy to Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation 不方便的小伙伴可以在此 xff1a 资源
TSCAN + TMODEL处理点云数据生成DEM
点云数据生成DEM流程 目录 点云数据生成DEM流程1 软件环境2 操作流程2 1 加载TSCAN TMODEL插件2 2 读取点云数据2 3 点云去噪 滤波2 4 构建tin模型2 5 生成格网DEM2 6 查看DEM数据 对基于商业软件
LeGO-LOAM算法详解
LeGO LOAM算法详解 整体框架 LeGO LOAM算法的总体框架如下图所示 xff1a 图中新增加了绿框中的Segmentation环节 xff0c 同时对后续的特征提取 Odometry以及Mapping部分均有一定的修改 xff0
最速下降法解析(理解笔记)
我们在高中或本科时期就了解到 xff1a 当函数存在解析形式且容易进行求导 xff08 f x f x f x 在最优点
ROS学习-tf介绍
tf简介 一个机器人系统一个时间段通常有多个3D坐标系在变化 xff0c 如世界全局坐标系 xff0c world frame base frame gripper frame xff08 手臂 夹子坐标框架 xff09 xff0c hea
Anaconda 与 ROS 冲突解决
Anaconda默认使用Python 3 而 ROS默认使用Python2 xff0c 若同时使用二者则会在调用一些ros包时出现冲突 目前解决方案是先在 bashrc文件中注释掉Anaconda xff1a span class toke
TI AWR1843毫米波雷达采集三维点云数据(ROS)
毫米波雷达以其稳定性 对不同环境的适应能力 价格等方面的优势逐步引起了科研人员的注意 xff0c 本文主要介绍利用了TI xff08 德州仪器 xff09 的AWR1843设备 xff0c 基于ROS系统进行采集点云数据的流程 供大家参考及
毫米波雷达原理介绍
毫米波雷达是指工作在波长为1 10mm的毫米波段 xff0c 频率为30 xff5e 300GHz 基于其工作模式可以分为 脉冲 和 连续波 两种 其中 xff0c 脉冲类型的毫米波雷达的原理与激光雷达相似都是采用TOF的方法 而连续波类型
Ubuntu18.04使用Xorg创建虚拟屏幕
目标 xff1a 使用远程软件 xff0c 如向日葵 TeamViewer Nomachine等来控制远程的电脑 xff08 Ubuntu 18 04桌面版本 xff09 作为服务端 存在问题 xff1a 被远程电脑若不连接屏幕会出现错误
数学符号大全
虽然在 Mathtype 能输入绝大多数想要的数学字符 xff0c 但是有些在 Visio 中无法输入 xff0c 可以在这里找出 xff0c copy就好了 xff0c 嘻嘻 xff5e 1 几何符号 2 代数符号 xff5e 3 运算符
8小时用HTML5打造VNCViewer
8小时用HTML5打造VNCViewer http cnborn net blog 另一个话题是ThoughtWorks徐昊带来的 8小时用HTML5打造VNCViewer 这个分享非常精彩 xff0c 其实现过程中的思考方式 使用的新技术
自制ST-Link V2.1,带串口,可自动更新固件,含全套资料下载
自制ST Link V2 1 xff0c 带串口 xff0c 可自动更新固件 xff0c 含全套资料下载 最近自制了一个带串口的ST Link V2 1 xff0c 现将全部资料共享给大家 xff0c 支持最新版的Keil 和IAR xff
LIO-SAM-自采数据运行踩坑
一直觉得LIO SAM还是一个比较不错的激光雷达惯性里程计框架 xff0c 最近在使用自己的数据进行测试过程中出现了很多坑 xff0c 花费了一周多的时间才填平 xff0c 在此记录一下 前言 Ouster 128激光雷达数据Ouster内
ROS bag包提取数据
日常使用中有时需要提取bag包中的某个topic数据为新的bag包 xff0c 或者裁剪其中的一段时间数据 这些功能均可以通过rosbag filter命令实现 下面 xff0c 我们简单介绍一下其使用流程 xff1a 首先 xff0c 使
Ouster激光雷达使用PTP时间同步
IEEE1588 the Precision Time Protocol 简称为 PTP xff09 全称是 网络测量和控制系统的精密时钟同步协议标准 xff0c 可以使用ubuntu中的网卡作为时间的master也可以外接一个精准的时钟
MATLAB绘图:plot函数与bar函数详解
MATLAB是由美国mathworks公司发布的主要面对科学计算 可视化以及交互式程序设计的高科技计算环境 我们可以利用它方便快捷的进行矩阵运算 绘制函数和数据 图像处理 前一段时间作者在进行毕业设计时使用MATLAB绘制了论文中的一系列插
随机推荐
树莓派ubuntu mate系统连接PX4并通过UDP连接至QGC地面站
前提条件 xff1a 树莓派安装了ubuntu mate 20 04系统ubuntu mate已经安装好ros 这里是noetic版本 系统 xff0c Mavros安装好QGC地面站的PCUSB数据线 xff08 确定能传输数据 xff0
make px4_sitl_default gazebo出现错误解决办法
Ubuntu20 04按上图操作进行PX4配置的时候出现如下错误 xff08 确保你已经完整git Firmware或者已经翻墙 xff09 xff1a Configuring incomplete errors occurred See
ubuntu 常用命令汇总
安装 sudo apt get install vim sudo apt get install nano 卸载 sudo apt get remove nano 给root用户设置密码 sudo passwd root 切换到root用户
多任务学习-An Overview of Multi-Task Learning in Deep Neural Networks论文笔记
An Overview of Multi Task Learning in Deep Neural Networks论文笔记 概述 xff1a 多任务学习有很多形式 xff0c 如联合学习 xff08 Joint Learning xff0
结构体
结构体 xff1a 结构是一些值的集合 xff0c 这些值称为成员变量 xff0c 每个成员可以是不同的类型变量 结构体成员的类型 xff1a 可以是 xff1a 标量 xff0c 数组 xff0c 指针 xff0c 结构体 struct
【ROS-3】ROS实现图像目标检测
1 darknet ros下载及编译 GitHub leggedrobotics darknet ros YOLO ROS Real Time Object Detection for ROS 直接下载zip就行 xff0c 解压到ros环
MapReduce实现基本SQL操作的原理
Join的实现原理 select u name o orderid from order o join user u on o uid 61 u uid 在map阶段的输出中给每个value一个tag xff0c 用于区分数据来源 xff0
raw、qcow2、vmdk等虚拟机的镜像格式
云计算用一个朋友的话来说 做云计算最苦逼的就是得时时刻刻为一些可能一辈子都碰不到的事做好准备 更苦逼的就是刚以为一个问题不会遇到 xff0c 立刻就发生了 这个还真的没有办法 xff0c 谁让哥我是搞云计算的呢 xff0c 简单一个虚拟化就
树莓派3b安装win10的桌面版操作系统
https www vediotalk com p 61 1999 目录 显示 国内播放节点 视频介绍 树莓派3b可以安装win10的桌面版操作系统 xff0c 大家也想体验的下 xff0c 不妨可以安装试试 xff0c 当然这并不能代替我
无人机学习笔记之遥控篇
遥控器 以LiteRadio 2c SE为例 1 遥控器按键 2 相关参数 3 遥控器工作原理 遥控器想要达到与无人机通信的功能需要有两部分配合完成 即 xff1a 发射器与接收机 遥控器上的控制杆转为无线电波发送给接收机 xff0c 而接
二分类算法
数据来源 xff1a 选自UCI机器学习库中的 银行营销数据集 Bank Marketing Data Set 算法完成目标 xff1a 这些数据与葡萄牙银行机构的营销活动相关 这些营销活动以电话为基础 xff0c 一般 xff0c 银行的
防抖,节流 js
概念 xff1a 函数防抖 debounce xff1a 触发高频事件后n秒内函数只会执行一次 xff0c 如果n秒内高频事件再次被触发 xff0c 则重新计算时间 函数节流 throttle xff1a 高频事件触发 xff0c 但在n秒
如何远程访问Docker容器中的图形界面,如:kettle
kettle是一个免费开源的 可视化的 功能强大的ETL工具 一般为了部署方便 xff0c 通常都部署在docker容器中 xff0c 那么如何远程访问kettle的图形界面呢 xff1f 我们通常有两种方式 xff1a 1 xff09 客
电子罗盘的工作原理及校准
ST集成传感器方案实现电子罗盘功能 电子 罗盘是一种重要的导航工具 xff0c 能实时提供移动物体的航向和姿态 随着半导体工艺的进步和手机 操作系统的发展 xff0c 集成了越来越多传感器 的智能手机 变得功能强大 xff0c 很多手机上都
OV2SLAM vs ORBSLAM2
框图 各个模块算法 OV2SLAMORBSLAM2对比特征点提取与匹配Fast 43 LK光流Fast 43 ORB 描述子LK光流速度快输出的实时posePnPMotion only BAMotion only BA精度高一点初始化 单目
论文学习--Learning High-Speed Flight in the Wild
文章目录 Git子文链接代码运行编译环境编译步骤 可选 1 下载源码 2 先安装Open3D 3 修改Open3D的相关路径 4 开始编译 5 报错2 6 报错3 7 运行中报错 8 配置学习环境 9 下载flighemare渲染环境 运行
仿真环境中生成专家轨迹
仿真环境中生成专家轨迹 文章目录 仿真环境中生成专家轨迹简介代码运行步骤获取输入数据Reference TrajectoryEnvironment PointcloudFull Quadrotor State 方法描述输出规划轨迹 简介 本
机器学习方法简介(1)--线性回归、逻辑回归、神经网络、支持向量机
机器学习方法就是计算机根据已有的数据 xff0c 得出某个模型 xff0c 然后利用此模型预测未来的一种方法 机器学习的一个主要目的就是把人类思考归纳经验的过程转化为计算机通过对数据的处理计算得出模型的过程 1 回归算法 回归算法包括线性回
仿真数据生成工具以及现有的仿真数据集
现有仿真数据集 TartanAir TartanAir 是一个用AirSim生成的仿真SLAM数据集 xff0c 可以用于视觉SLAM 数据集提供 xff1a 双目 RGB 图像 xff0c 深度图像 xff0c 分割 xff0c 光流 x
基于深度学习的SLAM概述
目的 本博客总结最近看的几篇关于深度学习的SLAM以及基于深度学习的稠密重建 xff0c 简要对比记录特点 对比 年份名称类型框图前端输出地图方法特点回环2022DPVOmono VOVO每一帧的pose和paches转到3D坐标系下的3D
热门标签
jst
qhull
solrcloud
cortana
numpystl
hpalm
hockeyapp
elki
codesmith
messenger
ora12519
quicktime
variants
sve
cglayer