感谢陈老师给的机会,有幸能够参加2020年的DAC比赛。我在其中负责目标检测器的调试和量化。自己第一次接触量化这个任务,很多东西都是一点一点学。
一、量化基础
对于一个全精度的值
v
v
v,若量化步长为
s
s
s(也可理解为量化分辨率),正负量化层级(quantization levels )分别为
Q
P
Q_{P}
QP和
Q
N
Q_{N}
QN。则量化过程为:
v
ˉ
=
I
n
t
(
c
l
i
p
(
v
/
s
,
−
Q
N
,
Q
P
)
)
\bar{v}=Int(clip(v/s,-Q_{N},Q_{P}))
vˉ=Int(clip(v/s,−QN,QP)) 其中的
v
/
s
v/s
v/s将全精度值映射到了比特空间,进行端侧修剪之后,返回最近距离的整数。若使用
b
b
b表示量化位数,对于Activations对应的无符号数,有
Q
N
=
0
,
Q
P
=
2
b
−
1
Q_{N}=0,Q_{P}=2^b-1
QN=0,QP=2b−1;对于Weights对应的有符号数,有
Q
N
=
2
b
−
1
,
Q
P
=
2
b
−
1
−
1
Q_{N}=2^{b-1},Q_{P}=2^{b-1}-1
QN=2b−1,QP=2b−1−1(正侧缺1项)。
解量化操作为:
v
^
=
v
ˉ
×
s
\hat{v}=\bar{v}\times s
v^=vˉ×s 量化&运算过程如下图所示:

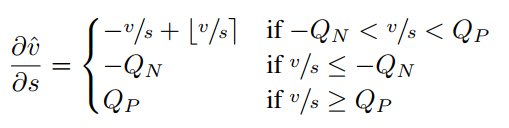
二、LSQ论文简介
这篇论文是IBM在2019年的ArXiv上放出来的论文,全名Learned Step Size Quantization。大概思想就是基于均匀量化,让网络自己去寻找每一层合适的量化步长
s
s
s。所以最核心的问题就是如何设定步长关于损失值L的梯度。
文中给出了解量化值
v
^
\hat{v}
v^关于
s
s
s的偏导的定义:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)