23 张图细讲使用 Devtron 简化 K8S 中应用开发
在本文中,您将学习如何在多集群环境中使用 Devtron 在 K8S 上进行应用开发。
https://devtron.ai/
Devtron 附带用于构建、部署和管理微服务的工具。它通过提供直观的 UI 和 Helm 图表支持来简化 K8S 上的部署。今天,我们将使用自定义 Helm 图表运行一个示例 Spring Boot 应用程序。将它部署在跨多个 K8S 集群的不同命名空间中。示例应用程序连接到数据库,该数据库在 K8S 上运行并已使用 Devtron Helm 图表部署。
在 K8S 上安装 Devtron
第一步,在 K8S 上安装 Devtron。有两种安装选项:带 CI/CD 模块或不带它。本文不会构建 CI/CD 流程,但是这个模块中包含了一些重要功能。首先,添加 Devtron Helm 存储库:
$ helm repo add devtron https://helm.devtron.ai
然后,执行以下 Helm 命令:
$ helm install devtron devtron/devtron-operator \
--create-namespace --namespace devtroncd \
--set installer.modules={cicd}
有关详细的安装说明,请参阅 Devtron 文档。
https://docs.devtron.ai/getting-started/install/install-devtron-with-cicd
使用 Kind 创建第二个 K8S 集群
为了在本地机器上准备多集群环境,我们将使用 Kind, 通过执行以下命令来创建第二个 K8S 集群 c1 :
https://kind.sigs.k8s.io/
$ kind create cluster --name c1
第二个集群的上下文是:kind-c1。创建 Kind 集群后,它将成为默认上下文。
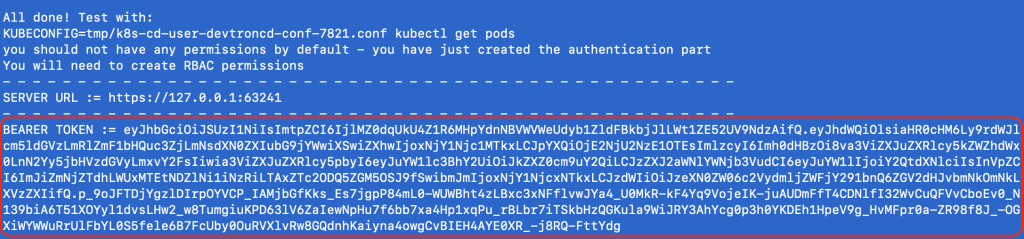
现在,我们的目标是将新创建的 Kind 集群添加为 Devtron 的托管集群。一个 Devtron 实例可以管理多个 K8S 集群。当然,默认情况下,它只管理一个本地集群。在我们将 Kind 集群添加到 Devtron 仪表板之前,应该首先在该集群上配置权限。以下脚本将生成一个bearer token用于身份验证,以便 Devtron 能够与目标集群通信:
$ curl -O https://raw.githubusercontent.com/devtron-labs/utilities/main/kubeconfig-exporter/kubernetes_export_sa.sh && bash kubernetes_export_sa.sh cd-user devtroncd https://raw.githubusercontent.com/devtron-labs/utilities/main/kubeconfig-exporter/clusterrole.yaml
bearer token打印在该命令的输出中,复制它。
我们还必须提供目标集群的 master API 的 URL。由于在 Kind 上运行 K8S,我需要获取包含 Kind 的 Docker 容器的内部地址。为了获得它,我们需要运行以下命令:
$ docker inspect -f '{{range.NetworkSettings.Networks}}{{.IPAddress}}{{end}}' c1-control-plane
这是我的 Kind 集群的 IP 地址:

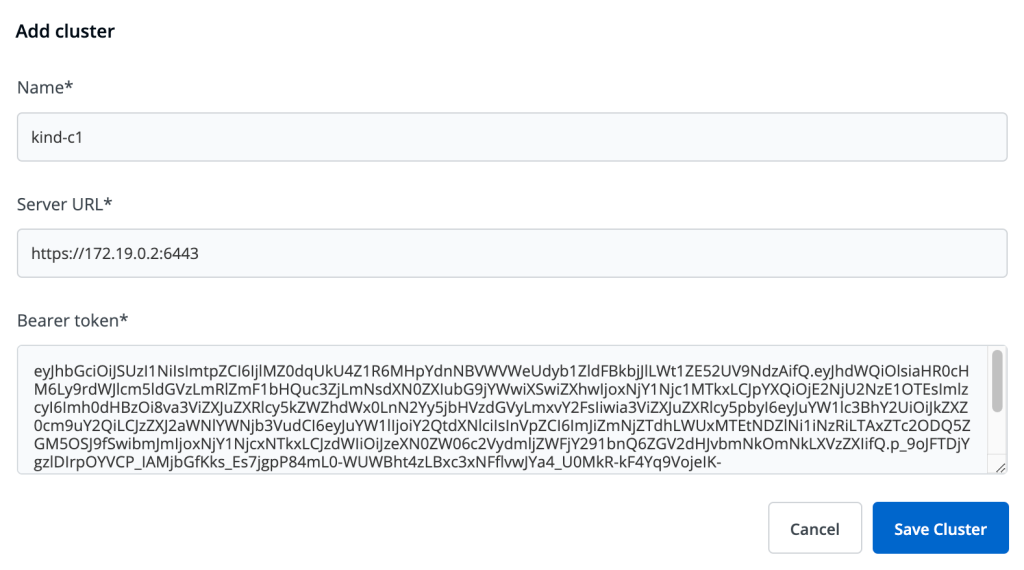
现在,我们拥有了在 Devtron 仪表板中添加新托管集群所需的所有数据。为此,导航到Global Configuration部分。然后选择Clusters and Environments项并单击Add cluster按钮。需要填写 Kind 集群 URL 和之前生成的bearer token。
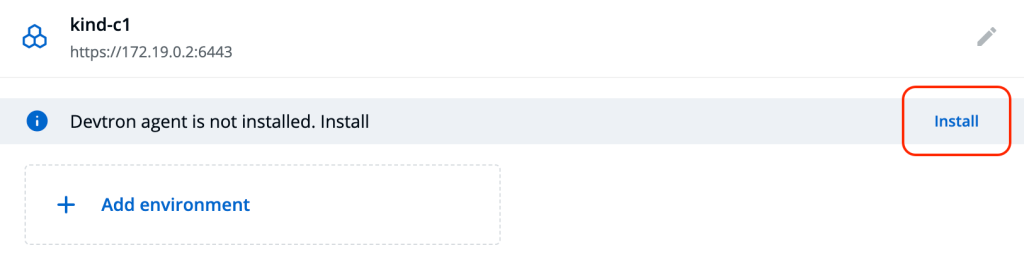
如果一切正常,您应该会在托管集群列表中看到第二个集群。现在,您还需要根据下面显示的消息在 Kind 上安装 Devtron 代理:
创建环境
我们将定义三个环境。在 Devtron 环境中分配给集群。我们将在本地集群(local)上创建一个环境,和另外两个 Kind 集群 ( remote-dev, remote-devqa) 。每个环境都有一个目标命名空间。为了简化,命名空间的名称与环境名称相同。当然,您可以设置任何想要的名称。
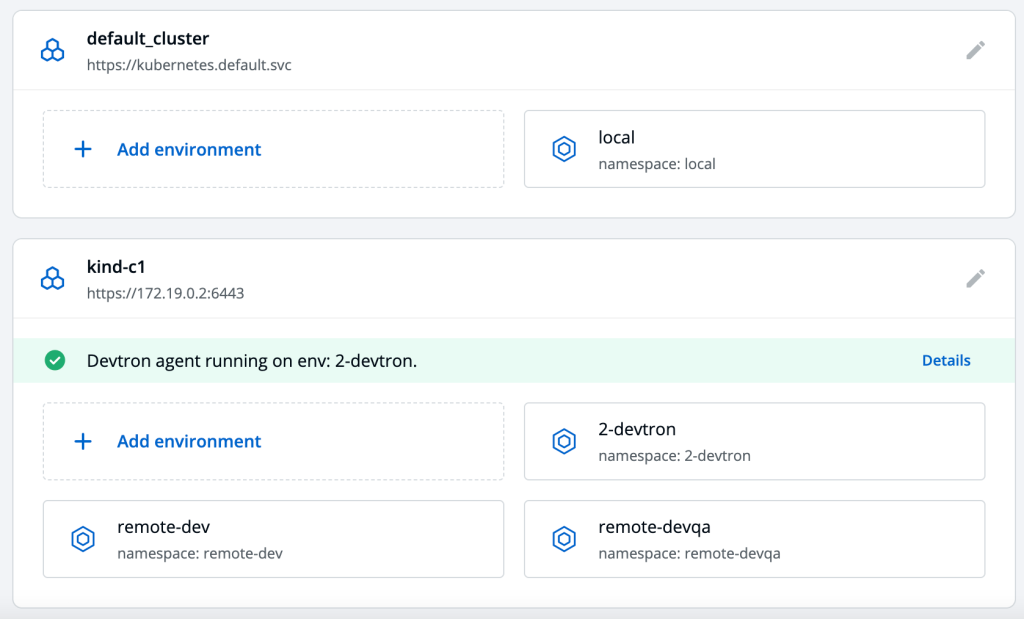
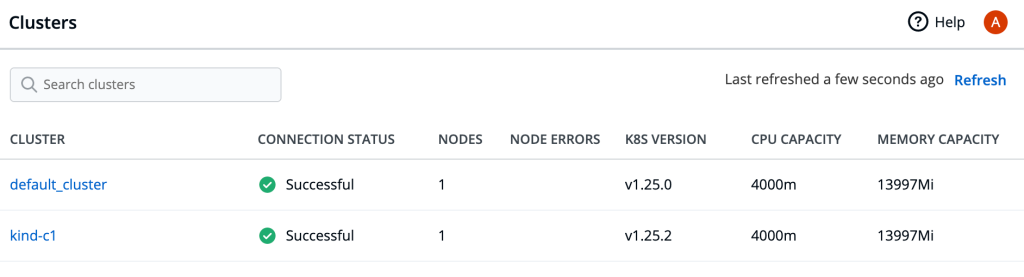
现在,切换到Clusters视图。
如您所见,现在有两个集群连接到 Devtron:
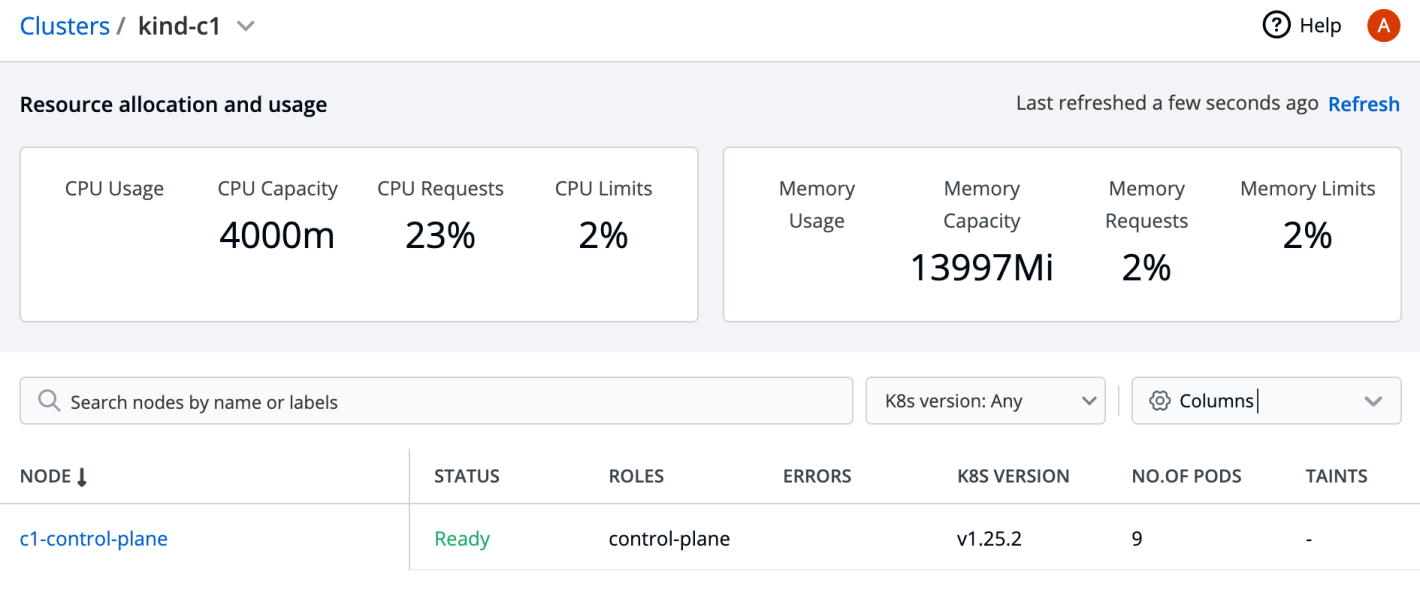
我们可以看一下每个集群的详细信息。在这里,您可以看到kind-c1集群的详细视图:
添加自定义 Helm 存储库
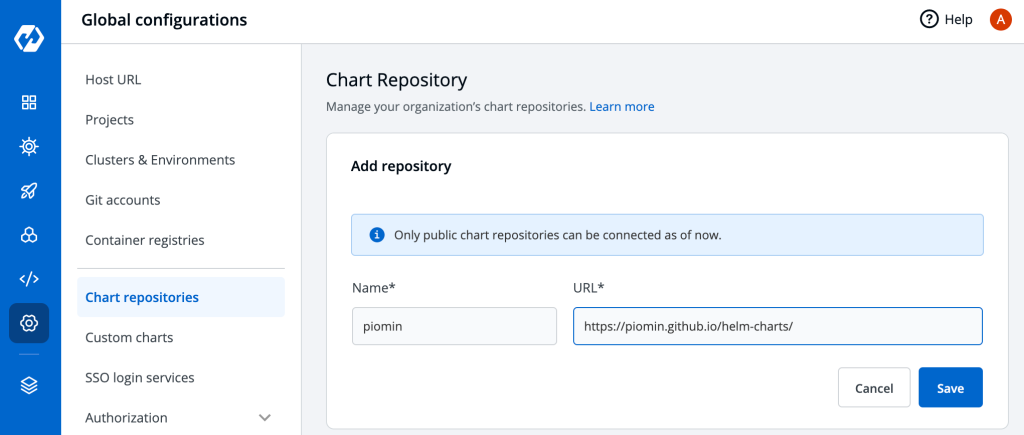
Devtron 最重要的功能之一是对 Helm 图表的支持。默认情况下,Devtron 中有几个可用的 Helm 存储库,包括bitnami或elastic,也可以添加自定义存储库。这里使用我自己的 Helm 存储库,其中包含用于部署 Spring Boot 应用程序的图表。我已经将它放在 GitHub 上:
https://piomin.github.io/helm-charts/
我们的图表名称是spring-boot-api-app,最新版本是0.3.2。

为了在 Devtron 中添加自定义存储库,我们需要再次进入Global Configurations部分。然后转到Chart repositories菜单项,然后单击Add repository按钮。如下所示,我添加了一个新存储库piomin。
创建存储库后,您可以转到Chart Store部分以验证新图表是否可用。
使用 Devtron 部署 Spring Boot 应用程序
现在,我们可以进行实践中最重要的部分:应用程序部署。我们的示例 Spring Boot 应用程序位于 GitHub 上的以下存储库中:
https://github.com/piomin/sample-spring-kotlin-microservice.git
这是一个用 Kotlin 编写的简单 REST 应用程序。它公开了一些用于添加和返回人员的 HTTP 端点,并使用内存存储。这是 Spring @RestController:
@RestController
@RequestMapping("/persons")
class PersonController(val repository: PersonRepository) {
val log: Logger = LoggerFactory.getLogger(PersonController::class.java)
@GetMapping("/{id}")
fun findById(@PathVariable id: Int): Person? {
log.info("findById({})", id)
return repository.findById(id)
}
@GetMapping("/age/{age}")
fun findByAge(@PathVariable age: Int): List<Person> {
log.info("findByAge({})", age)
return repository.findByAge(age)
}
@GetMapping
fun findAll(): List<Person> = repository.findAll()
@PostMapping
fun add(@RequestBody person: Person): Person = repository.save(person)
@PutMapping
fun update(@RequestBody person: Person): Person = repository.update(person)
@DeleteMapping("/{id}")
fun remove(@PathVariable id: Int): Boolean = repository.removeById(id)
}
假设我们正在开发最新版本,想将其部署在 K8S 上以执行一些开发测试。第一步,将在本地构建应用程序并使用 Jib Maven 插件将镜像推送到容器注册表。这是所需的配置:
<plugin>
<groupId>com.google.cloud.tools</groupId>
<artifactId>jib-maven-plugin</artifactId>
<version>3.3.0</version>
<configuration>
<to>
<image>piomin/sample-spring-kotlin-microservice</image>
<tags>
<tag>1.1</tag>
</tags>
</to>
<container>
<user>999</user>
</container>
</configuration>
</plugin>
让我们使用以下命令构建镜像并将其推送到容器注册表:
$ mvn clean compile jib:build -Pjib,tomcat
除了 YAML 模板,Helm 存储库还包含一个用于values.yaml 验证的 JSON schema 。多亏了该 schema ,我们将能够利用 Devtron GUI 从图表创建应用程序。让我们看看它是如何工作的。
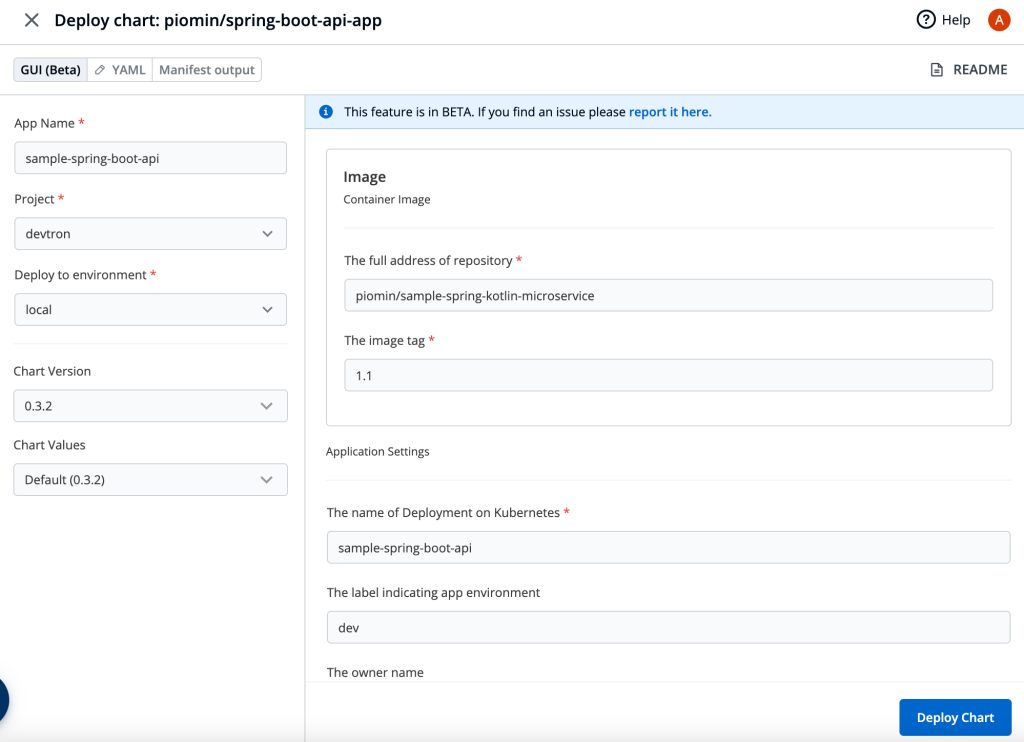
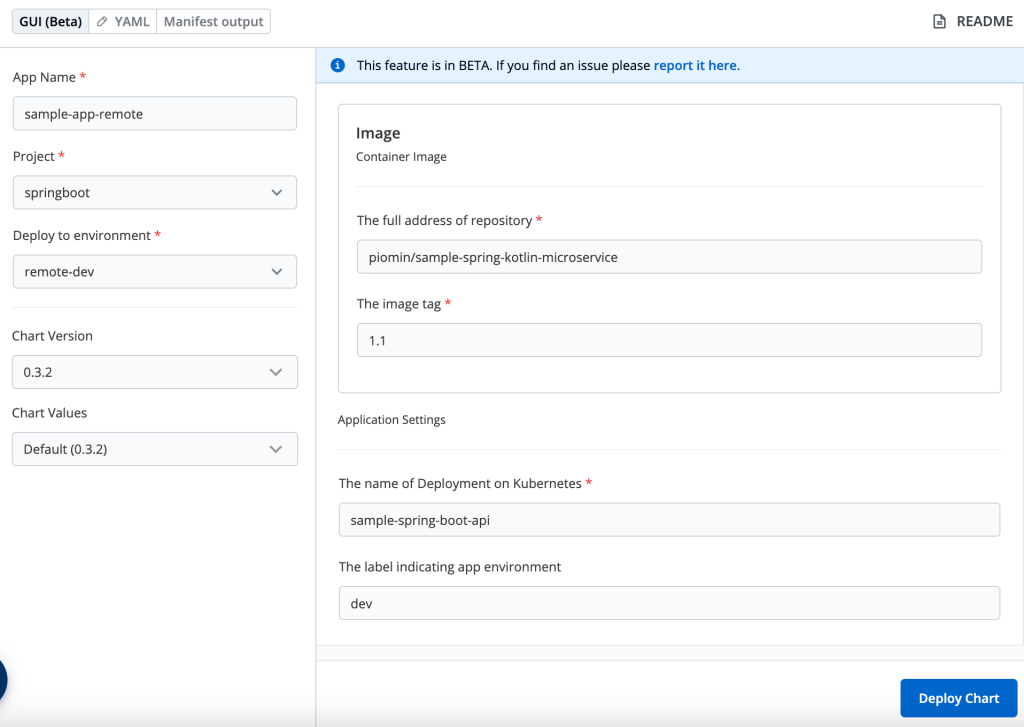
单击自定义图表后,将被重定向到包含详细信息的页面。最新版本的图表是0.3.2. 只需单击部署按钮。
在下一页上,需要提供应用程序的配置。目标环境是存在于主集群上的local。多亏 Devtron 对 Helm values.schema.json 的支持,使得我们使用 GUI 表单定义所有值。例如,可以增加更改镜像的值到最新的:1.1。
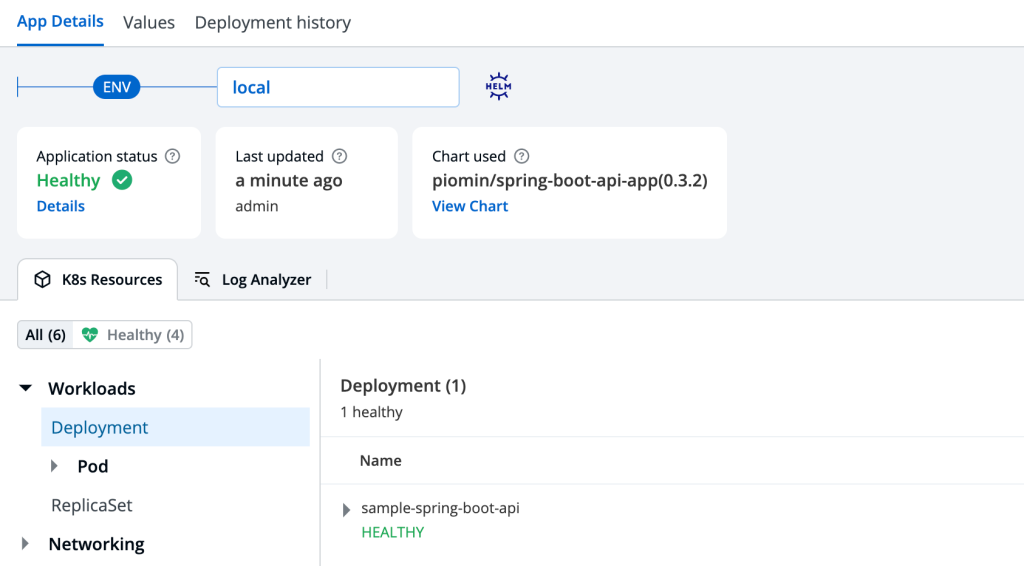
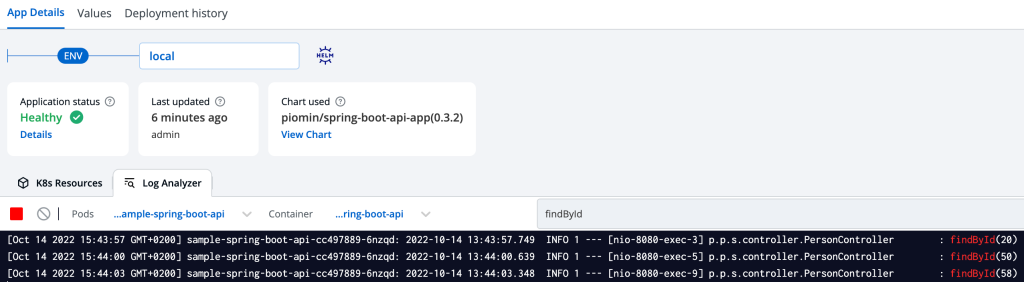
部署应用程序后,我们可以验证其状态:
让我们进行一些测试调用。示例 Spring Boot 公开了 Swagger UI,因此我们可以轻松发送 HTTP 请求。要与运行在 K8S 上的应用程序交互,应该为服务启用端口转发kubectl port-forward svc/sample-spring-boot-api 8080:8080。执行该命令后,您可以通过 http://localhost:8080/swagger-ui.html 访问地址 Swagger UI:

Devtron 允许我们查看 pod 日志。还可以用 grep。下面展示了与测试调用相关的日志。
将应用部署到远程集群
现在,我们将示例 Spring Boot 应用程序部署到远程集群。为了做到这一点,请转到与以前相同的页面,但不要选择本地环境,而是选择remote-dev,它与kind-c1集群相关联。
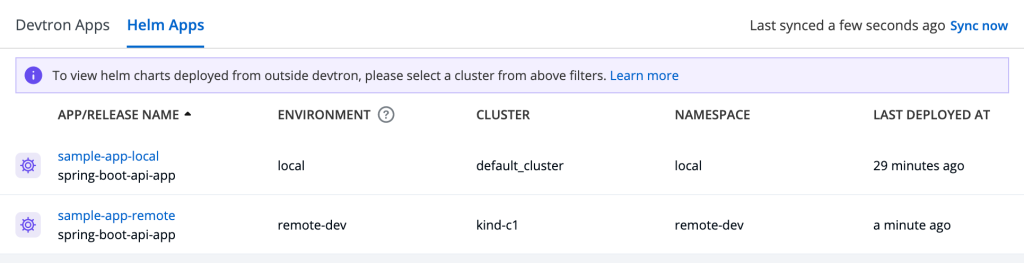
现在,有两个相同的应用程序在两个不同的集群上运行。我们可以对在 Kind 集群上运行的应用程序和本地集群执行相同的操作,例如验证其状态或检查日志。
部署应用组
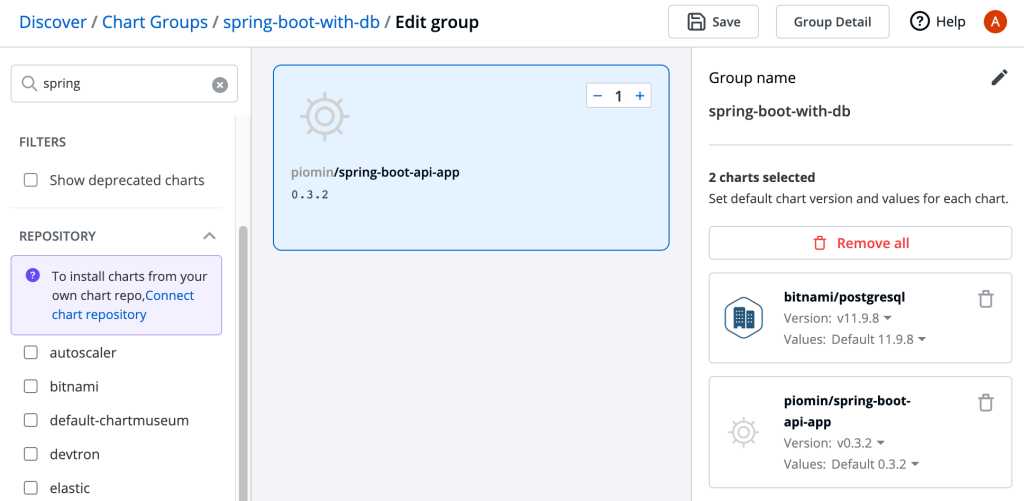
假设我们要部署连接到数据库的应用程序。我们可以使用名为Chart Group的 Devtron 功能一步完成。使用该功能,我们可以将 Spring Boot 的 Helm 图表和 Postgres 的图表放在同一个逻辑组中。然后,我们可以将整个组部署到目标环境中。要创建图表组,请转到 Chart Store 菜单,然后单击Create Group按钮。您应该设置组的名称并选择将包含的图表。对我来说,就是bitnami/postgresql图表和我的自定义 Helm 图表。
创建组后,您将在Chart Store主页面上看到它。现在,只需单击它即可部署应用程序。
单击带有图表组的磁贴后,您将被预测到部署页面。
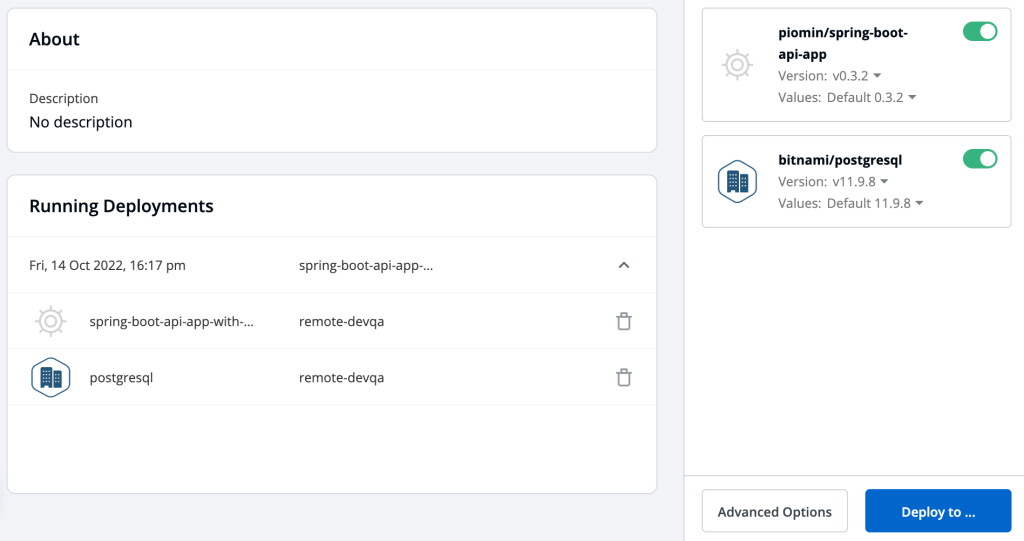
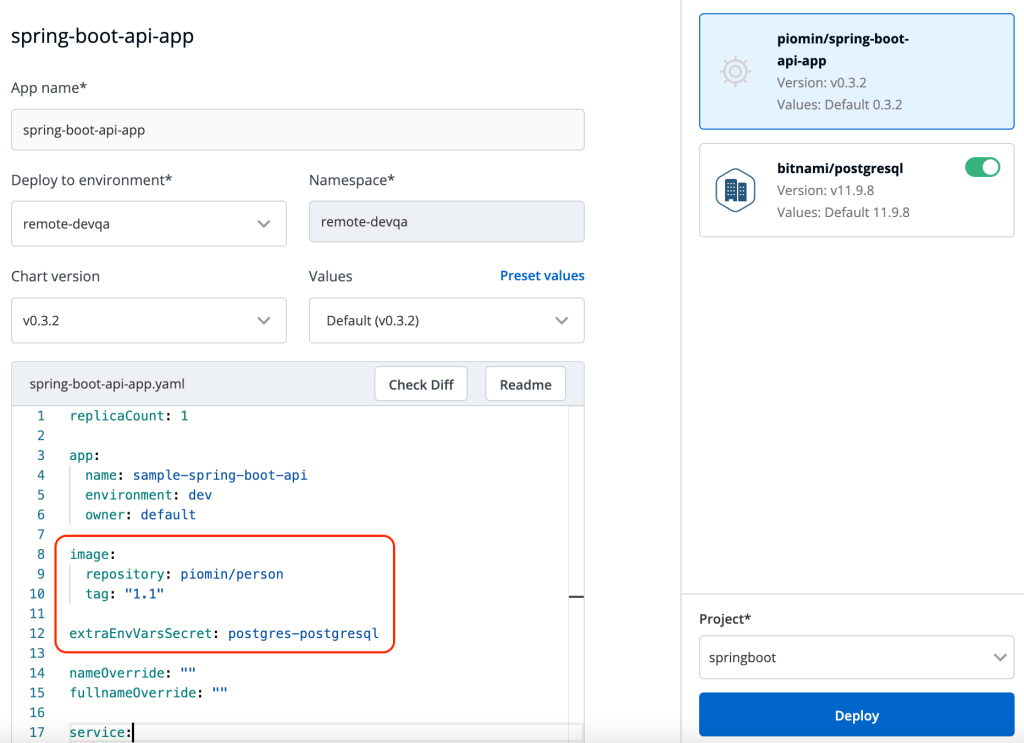
单击Deploy to…按钮后,Devtron 会将您重定向到下一页。您可以为该组的所有成员图表设置目标项目和环境。我们会将它们从集群部署到kind-c1集群的remote-devqa命名空间中。其中的镜像,可以填写我的 Docker 帐户中的:piomin/person:1.1。
默认情况下,它会尝试连接到postgres主机上的数据库。唯一需要注入应用容器的是 postgresql Secret(由 Bitnami Helm 图表生成)中postgres用户密码。要注入该Secret中的环境变量,请在自定义 Spring Boot 图表中使用extraEnvVarsSecret参数。最后,让我们通过单击Deploy按钮在remove-devqa命名空间中部署 Spring Boot 和 Postgres 。
这是本次实践中已部署应用程序的最终列表:

总结
-
借助 Devtron,可以使用 Helm 图表轻松地支持跨多个 K8S 集群部署应用程序。
-
Devtron 简化了 K8S 的开发,可以通过图表组功能部署所有需要的应用程序。
-
-
可以在仪表板中执行所有操作,而无需自己传递任何 YAML 清单或执行
kubectl命令。