Esp32 模块中已经提供了 FreeRTOS(实时操作系统)固件。FreeRTOS有助于提高系统性能和管理模块的资源。FreeRTOS允许用户处理多项任务,如测量传感器读数,发出网络请求,控制电机速度等,所有这些任务都可以同时独立运行。
FreeRTOS为不同的应用程序提供了多个API。这些 API 可用于创建任务并使其在不同内核上运行。您需要创建任务以将代码的特定部分分配给特定内核。您还可以确定代码将在哪个内核上运行的优先级。优先级值以 level_0 开头。
每当我们在Arduino IDE上运行代码时,默认情况下,它会在core_1上运行。
您可以使用一个函数来检查代码在哪个内核上运行。xPortGetCoreID()
void setup()
{
Serial.begin(115200);
Serial.print( ” setup() is running on: Core_” );
Serial.println( xPortGetCoreID() );
delay(1000);
}
void loop()
{
Serial.print( ” loop() is running on: Core_” );
Serial.println( xPortGetCoreID() );
delay(1000);
}

这段代码中,我们将使用两个led由不同的核心处理。
TaskHandle_t task1;
TaskHandle_t task2;
const int led1 = LED_BUILTIN;
const int led2 = 25;
void setup() {
Serial.begin(115200 );
pinMode( led1, OUTPUT );
pinMode( led2, OUTPUT );
xTaskCreatePinnedToCore(task_1code,
“Task1”,
10000,
NULL,
1,
&task1,
1);
delay(1000);
创建一个在Task2code()函数中执行的任务,优先级为1,并在核心1上执行
xTaskCreatePinnedToCore(task_2code,
“task2”,
10000,
NULL,
1,
&task2,
0);
delay(1000);
}
void task_1code( void * pvParameters ){
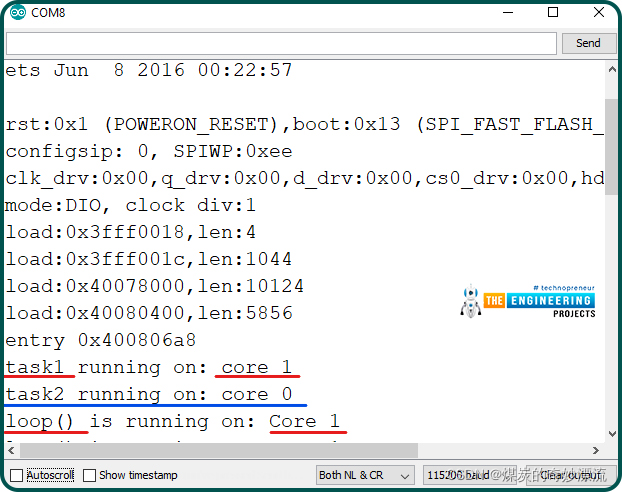
Serial.print( “task1 running on: core ” );
Serial.println( xPortGetCoreID() );
for(;;)
{
digitalWrite( led1, HIGH);
delay(1000);
digitalWrite(led1, LOW);
delay(1000);
}
}
void task_2code( void * pvParameters )
{
Serial.print( “task2 running on: core ” );
Serial.println(xPortGetCoreID() );
for(;;){
digitalWrite(led2, HIGH );
delay(500);
digitalWrite(led2, LOW );
delay(500);
}
}
void loop()
{
Serial.print( ” loop() is running on: Core ” );
Serial.println( xPortGetCoreID() );
delay(1000);
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)