智能无人测量船设计进展(硬件系统)
- 目录
- 前言
- 课题目的
- 研究现状
- 控制系统(Pixhawk)
- 动力系统
- 供电系统
- 通讯系统
- 传感器系统
- pixhawk2.4.8接口分析
- 控制系统详细分析
- 技术路线
- 参考文献
目录
前言
面临毕业季,由于考研失利,本科学的测绘,与课题相关性较小便较早的开始毕设任务。毕设开始已有三个月将一些目前的成果与大家分享,希望能提供给大家一些帮助,同时希望二战成果上岸。
课题目的
为获得河底地貌信息,各学者对河道水域的测量提出不同的技术方案。其中最为实用的是在船下配置声呐结合以实时动态载波相位差分技术(Real - time kinematic,RTK)定位对河深、河底地貌进行自动测量最终得到河底的地貌信息同时亦可用于海洋中的鱼群位置定位跟踪等提供技术支持。
研究现状
- 无人平台控制系统的研究现状
飞行控制器(飞控)作为无人船的控制大脑,是无人船能够保持稳定的航行的核心硬件[1]。主要用于无人机[2][3]的在起飞、巡航、降落等阶段对其他系统进行的协同辅助控制的元件,通常有集成有惯性测量单元(IMU)、气压计、加速度计、磁罗盘等,保证了无人机运行状态的稳定。
无人控制系统发展较为迅速,目前在无人机室内自主避障[4][5]、路径规划[6]和抗干扰[7][8]等方面取得了较好的成绩,但就目前无人测量船而言这些技术还没有得到系统性的应用,无人船领域并未实现真正意义上的智能化,这与水面环境变化有着一定的关系。针对控制系统方洵等(2018)基于APM系统中通用配置方式和对Mavlink通讯协议的理解在RTPS协议下进行控制系统设计,对无人船航向控制过程中的风浪混合干扰,对PX4平台原生mahony算法与导航控制算法修缮,结合模糊PID控制技术,提出有效的PD控制手段,实现控制参数自适应调整与优化[9]。 - 无人船动力系统的研究现状
无人船是一种通过预设任务在水面自主航行的新型无人设备,其动力技术是决定其航程与工作能力的重点[10]。
国内外无人船的动力系统主要采用蓄电池动力或柴油机动力,何新英等[11]在2019年提出混合动力系统的设计方式,针对市场上蓄电池动力持续航行能力不足以及柴油机动力系统易造成环境污染问题,提出设计一款便捷式混合动力系统,将蓄电池与柴油机相结合,解决了当前单一动力系统所存在的根本性问题。该动力系统在无人船的不同工况下都可保证柴油机运行在最佳工作区,从而降低油耗和排放。并且柴油机不与负载直接连接,所以可以降低整船的冲击振动,提高测量的精度。
目前在基于无人船的混合动力研究还在试验阶段,该方向的研究相对较少,近年来何新英与陈剑龙等在该领域具有核心贡献。 - 无人船定位系统的研究现状
全球导航卫星系统(Global Navigation Satellite System,GNSS)的使用正变得越来越普遍[12],在无人测量船领域亦起到关键作用对于水域传统的测量方式是在浅滩、近岸等地方利用RTK直接人工进行测量[13],而该方法很难满足当下的测绘需求。在无人系统的发展下,装载有RTK、声呐等设备的无人船可快速精确的获取水下地形数据。 - 无人船应用领域现状
无人艇的发展起源于第二次世界大战,当前无人船在漂浮物清理[14]、水质的检测[15][16][17]、水下地形测量[18][19]、海洋检测[20][21]等方面得到了应用。
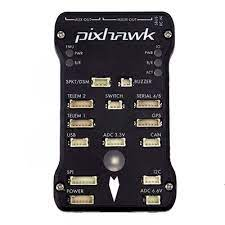
控制系统(Pixhawk)
飞行控制器,是用于在起飞、巡航、降落等阶段辅助或全自主对飞行器的其他系统及元器件起到协同控制的元件。通常与惯性测量单元(IMU)、气压计、磁罗盘等元器件共同组成飞行控制系统一同使用。在飞行器飞行过程中,飞控感知飞行器的飞行高度、速度、角度及位置信息,按照预先设定好的飞行计划或临时接收的飞行指令,控制飞行器的不同系统做出相应的动作,对于固定翼机是调整舵面等,对于多旋翼机是调整各个动力的输出功率等,从而达到改变飞行姿态的目的。
市面上飞控大致有六种,1)KK飞控:价格低廉,但其扩展性低,无自稳,不能定高和GPS。2)qq飞控:价格同样便宜,性能比KK好,多了一个自稳功能,且操作简单。3)MWC飞控:它分为高配与低配版本,价格最高不超过400元,最低90多。高配的能实现自稳,GPS,定高等功能。但是MWC调试十分十分复杂,且卖家均不提供技术支持!4)APM/pixhawk飞控:调试有些复杂,但它扩展极高,支持几乎所有功能,极客首选。价格在100~300之间,开源。5)零度,大疆飞控两款都很贵,但调参简。
扩展安装简单。功能十分强大,性能出众,外观友好价格从来不低于1000元。
经研究对于无人测量船来说需要各传感器的集成以及同样其稳定性须有一定的要求,APM/pixhawk飞控完全符合要求,相对零度和大疆价格更为优惠,同时系统完全开源配置相对容易。故选取APM/pixhawk飞控作为无人测量船的控制系统,而pixhawk相对APM来说界面更为简洁将各个插口分开来对于新手了解学习提供了方便,同时APM开发人员并不再为其进行更新,开发人员Pixhawk还在进行优化。故采用pixhawk作为无人测量船的控制系统。
动力系统
本次设计的动力系统主要以电机和电调为主,同样加入了一个处理水草的设计(由于小众便不加以详细介绍)。
-
电机(2个,正反浆):直流电机分为有刷电机和无刷电机。
无刷电机优点:1)无电火花,极大的减少了无线电设备的干扰。2)摩擦力大大减小噪音也会降低。3)使用寿命较长-几乎是免维护设备
有刷电机优点:1)低速扭力、转矩大。2)便宜
选用电机规格:https://item.jd.com/10044071352956.html#crumb-wrap
价格:447*2元
马达最大效率时,电流为:12.5A。一般的模型电机的空载电流是2A左右,最大负载电流每个电机不一样,如果电机在堵转的时候,这个时候是用的大功率电调,高放电倍率电池,会造成电流短时间内急剧上升,时间稍微过长,就会烧毁电机。选择大电流电调,一定要配合大功率的电机,让他们相互配合。

-
电调(esc)(2个):在国内电调的电调市场主要有两种较好的品牌,一种是中威特另一种便是好盈,目前好盈覆盖了高中低不同档次的定位,经调查好盈天行者更是被广大无人机爱好者一致推荐,在无人船项目上选用天行者电调。
我们电机最大效率电流为12.5A:那么选择的电调最低为12.5A ,但是一般出去安全考虑,电调要选择大一点的! 如:15A -20A。由于选取电机推力达到2.4kg是工作电压在24V,每节电池电压3.6V,如满足工作电压为24V左右时至少需要6节电池串联而成。则电调输入应满足6S的锂电池,同时工作电流不应超出太多以免伤害电机。
选用电调规格:https://item.jd.com/19997922526.html
价格:75*2元


供电系统
供电系统包括电池、充电器、分电板组成。电池经过分电板直接连接电调给电机进行供电,而电调中自带有降压模块,可输出5V左右电压给pixhawk与其他需要较小电压的模块供电。
-
电池选用(1个):
能量密度高、安全性能好、循环寿命长、续航能力强、安全环保、防护等级高(如防尘、防水等)是现代高机能锂电池的一大特点,这也同时是无人船所需的电池特点。无人船和无人机使用的电池原理基本都是一样的,都会涉及到暴力放电的情况,所以高倍率电池会是无人船的首选。同时由于无人船需要工作的时间长且需要在需要控制无人船的重量,那么高压电池也就成了一个不错的选择。深圳市格瑞普电池有限公司是一家集电池设计、研发、生产、销售为一体的深圳市工业百强企业,同时格瑞普也是国家高新技术企业以及深圳市高新技术企业,所以采用格氏电池作为所需电池。
当电池给出放电倍率和容量时选用电池一般看先看电池容量,比如2200MA , 容量确定了,那就要看倍率了! 如:2200MA 10C ,那么这个电池能以:2.2A(2200MA =2.2A ) 10=22A , 这个电池的最大放电电流为22A显然和上面的电调不匹配,那么需要选择15C 2.215=33A ,这个可以满足前面的要求了! 如果是20C 的电池,那么可以以:2.2*20=44A 的电流放电。无人船最大功率时,两个电机电流只有25A ,这个电池可以44A 来放电,无疑,电池会更加轻松. 马达也是一直以最大功率来运行!获得的动力将是非常满意的。配合2200MA 20C的电池,最大负载电流为12.5A的电机,最大输出为30A的电调是一个比较合理的配置。
配合下来就是 最大电流12.5A的电机,30A电调,2200MA 20C电池是最好的配合。
确定电机,确定电调,最后确定电池。千万不要不顾电机的情况,盲目选用电池,电调,容易烧毁电机。
注意如果我们是为两个推进器选电池,因为两组电调,如果采用20A的电调,那么我们就要采用20A X 2个=40A以上的电池,为了无人船的续航能力,我们一般选用10000MA,25C的电池,就是10 X 25C = 250A,已达到最优的重量,容量的匹配关系。同时插头需要改为T插。
选用电池规格:


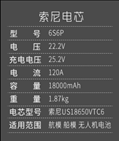
价格:1460
https://detail.tmall.com/item.htm?spm=a1z10.1-b.w5003-23169480373.17.6c72197bURYhe8&id=600896068868&rn=72cf4724a31dd75fd4a9802cb3505e95&abbucket=5&scene=taobao_shop
-
充电器(1个):根据选取电池规格选取充电器,为保证充电电压与电池一致选取电压为25.2V的充电器,为保证充电较快采用充电电流为3A。

https://detail.tmall.com/item.htm?spm=a1z10.5-b.w4011-17445661225.54.7af3673d3Rciby&id=573107896083&rn=0370a4397615346610ccc54f19444fe0&abbucket=5&skuId=4463448114756
价格:76.5
3. 分电板:将电池与多个电调连接,已有电流计为T插头的接口,选取分电板时需要采用T插头输入电流的分电板,输出端接口可以自由配置。
选用规格:
https://item.taobao.com/item.htm?spm=a230r.1.14.22.fe663c90330fIz&id=560309079816&ns=1&abbucket=11#detail
价格:25
通讯系统
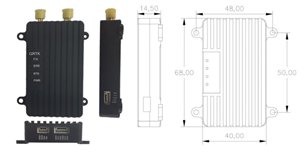
- 数传:数传是通过地面站和无人船连接传递信息的工具,在地面站显示出当前无人船的各种姿态、位置、以及水深等情况,同样可通过地面站对无人船进行控制,设定航点的情况等。
数传参数:





价格:559
https://item.jd.com/10039687393318.html?cu=true&utm_source=kong&utm_medium=jingfen&utm_campaign=t_1000124725_pc_19811319&utm_term=e8b297ec1309463298d5263c3e1b3e69 - 遥控器(1个):https://item.jd.com/10034370850960.html#product-detail(可带有接收机)
- 接收机(1个):无人船动力系统仅在二维平面运动和无人机不同其通道数并不多故仅采用9通道的接收机便可达到最优方案。
接收机规格:富斯iA6B接收机,支持SBUS IBUS PPM PWM信号 ,4.0-6.5V供电,价格64元

https://item.taobao.com/item.htm?id=648697598311&ali_refid=a3_430673_1006:1121220214:N:YjAe8D1xRlwzEtALkSjS3Q%3D%3D:0324b6586b045c1036c98df3b83d3142&ali_trackid=1_0324b6586b045c1036c98df3b83d3142&spm=a2e0b.20350158.31919782.1
传感器系统
- RTK
为保定位精度要求,采取RTK进行定位,要求精度在2cm之内,本设计方案的RTK采用Blicube RTK,G-RTK 是 BLI(北力电子)独立研发的双天线高精度差分定位定向模块(Real Time Kinematics),通过两个 G-RTK 模块(一个移动端,一个基站端)可组成完整 的 RTK 系统。该RTK采用国产定位芯片,支持双天线侧向,支持北斗、GLONASS、Galileo、GPS、QZSS(日本)导航系统。主要面向无人机、机器人及智 能驾驶等高精度定位定向需求。其单点平面定位精度是1.5m、高程定位精度是2.5m,RTK平面定位精度是1cm+1ppm、高程定位精度是1.5cm+1ppm,向精度为0.2度/m基线。
说明书链接:http://blicube.com/ 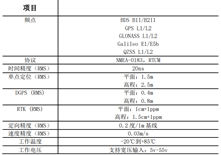
价格:6500元
https://item.taobao.com/item.htm?spm=a230r.1.14.1.39f254adN9X2GO&id=643614974982&ns=1&abbucket=10#detail
2. 声呐:
Blue Robotics Ping 回声测深仪和高度计是一种低成本的水下声纳,用于测量与水下物体的距离。Ping 具有 50 米的射程、30 度的光束宽度和 300 米的深度等级。它可以用作 ROV 或 AUV 上的高度计,用于 USV 或船上的水深测量,或用作任何海洋机器人的避障声纳。
Blue Robotics 为 Ping Echosounder 提供并维护了一套丰富的支持开源软件和文档:Ping-Viewer

配置:价格299$
3. 温度传感器:
摄氏温度传感器是一种快速响应、高精度的温度传感器,与水密封,由铝制笼子保护,可随时安装在防水外壳中。使用它可以在任何流体中进行深度/温度分布、表面温度分布和精确测量。
该传感器是 Measurement Specialties TSYS01,精度为 ±0.1°C,并通过 I 2 C 进行通信。它标配 4 针 DF13 连接器,并与大多数DroneCode兼容板兼容,包括 APM2.6、PixHawk 等.
TSYS01 传感器本身具有快速的时间响应,我们设计了整个封装以保持该速度,即使在快速下降/上升时也能实现准确的温度曲线测量。摄氏温度传感器的响应时间常数为 1 秒(流量为 0.5 m/s)和 2 秒(在静水中)。
参数配置
价格:60$
https://bluerobotics.com/store/sensors-sonars-cameras/sensors/celsius-sensor-r1/
4. 压力传感器:
Bar30压力传感器是一种高压、高分辨率压力传感器,与水密封,可安装在ROV 或 AUV的防水外壳中。凭借 0.2 mbar 的分辨率,它在水柱中拥有 2mm 的惊人深度测量分辨率!
该传感器是 Measurement Specialties MS5837-30BA,可测量高达 30 bar(300m/1000ft 深度)并通过 I 2 C 进行通信。它在 3.3VI 2 C 电压下工作,但可接受高达 5.5V 的电源输入。它标配 4 针 DF13 连接器,与大多数飞行控制器板兼容,包括 PixHawk 等。ArduPilot和ArduSub默认支持 Bar30 传感器,因此它可以用于任何 ArduSub 控制的 ROV,如BlueROV2。我们还提供有关如何将 Bar30 与Arduino和Raspberry Pi设备一起使用的指南。
该传感器包括一个精确到 ±1°C 的温度传感器,数据也可以通过 I 2 C 访问。如果您需要温度精度更高的东西,请查看摄氏温度传感器。
参数配置:
价格:72$
https://bluerobotics.com/store/sensors-sonars-cameras/sensors/bar30-sensor-r1/
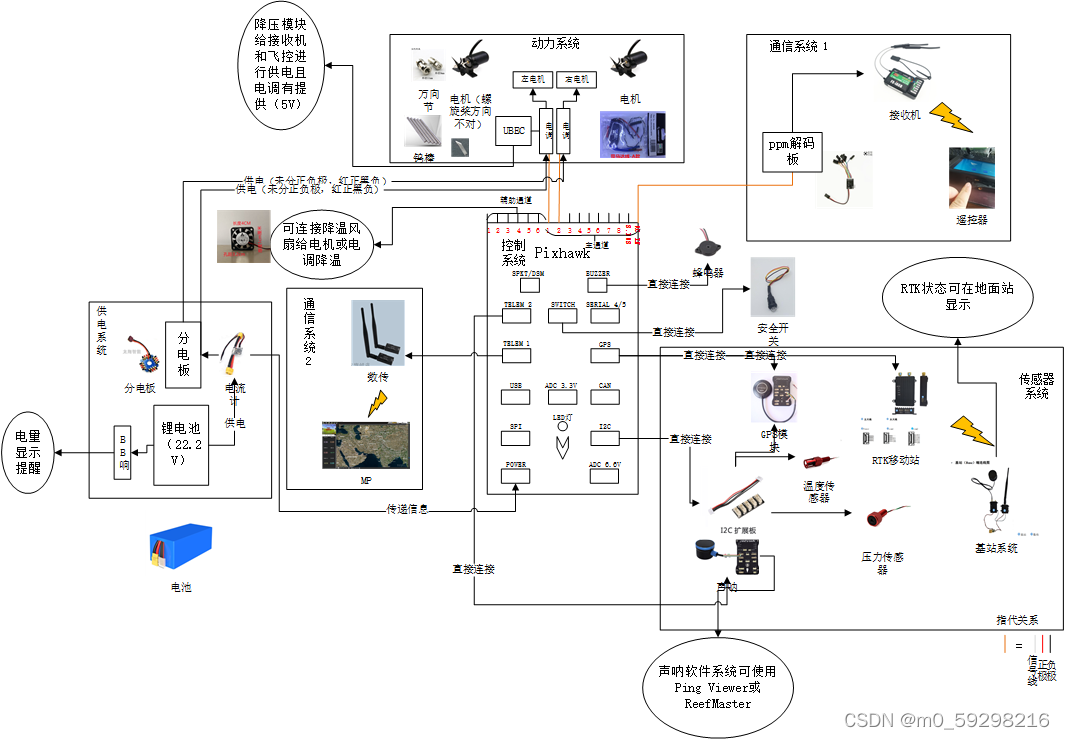
pixhawk2.4.8接口分析
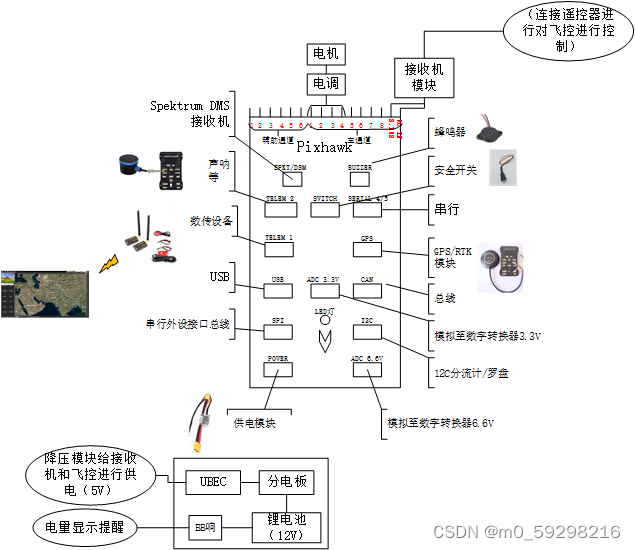
控制系统详细分析
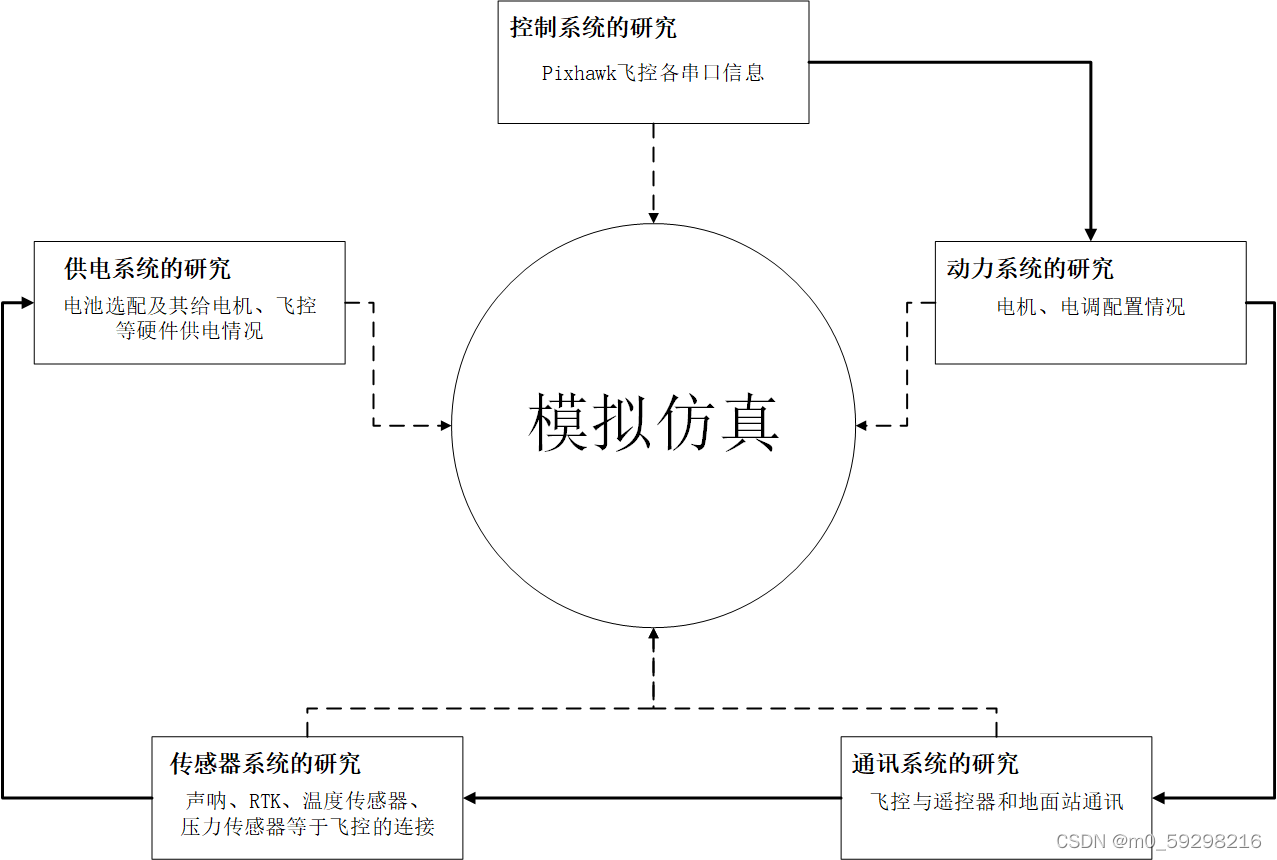
技术路线
参考文献
[1] 孟常.Pixhawk飞控在无人机中的应用研究[J].信息记录材料,2021,22(05):151-153.DOI:10.16009/j.cnki.cn13-1295/tq.2021.05.081.
[2] 胡玉柱,冼俊衡,任姝萍,段岳廷,李永培.基于PIXHAWK飞控的四旋翼机械臂无人机设计[J].电子世界,2020(07):181-182.DOI:10.19353/j.cnki.dzsj.2020.07.104.
[3] 崔玉博. 基于PIXHAWK的无人机室内通道自主避障飞行研究[D].沈阳理工大学,2020.DOI:10.27323/d.cnki.gsgyc.2020.000312.
[4] 杨旗,崔玉博,陈杰,王家楠.基于Pixhawk的无人机室内通道自主避障研究[J].内燃机与配件,2019(07):172-174.DOI:10.19475/j.cnki.issn1674-957x.2019.07.088.
[5] 陈希.基于激光传感器的农业无人机避障路径控制系统设计[J].机械制造与自动化,2021,50(06):170-173.DOI:10.19344/j.cnki.issn1671-5276.2021.06.043.
[6] 姜琼阁. 基于PX4的地面无人车避障系统及路径规划研究[D].北方工业大学,2019.
[7] 王少辉. 接触式作业空中机器人抗扰控制技术研究[D].南京航空航天大学,2020.DOI:10.27239/d.cnki.gnhhu.2020.002269.
[8] 赵元魁. 室外环境下旋翼飞行器抗干扰研究[D].太原理工大学,2019.
[9] 方洵,黄辉.基于Ardupilot的微型无人船航向控制系统设计[J].科技创新与应用,2018(30):27-31.
[10] 王天龙. 5kW混合动力无人船电源管理系统的设计与实现[D].海南大学,2020.DOI:10.27073/d.cnki.ghadu.2020.000092.
[11] 何新英,叶永权,徐曼平,苏一丹.便携式无人测量船混合动力系统设计[J].机电工程技术,2019,48(11):16-18.
[12] Hetherington C . Effectiveness of real time kinematic global navigation satellite system suveying (RTK GNSS). 2008.
[13] 申佳亮.GNSS结合无人船技术在水系综合治理勘测中的应用研究[J].科技资讯,2021,19(24):52-54.DOI:10.16661/j.cnki.1672-3791.2109-5042-9670.
[14] 史浩辉,李莉莉,付宗国,罗准,官俊.一种水面漂浮物自动清理机器人结构设计[J].机械工程师,2019(01):110-112.
[15] 何惠彬,王伟丽.花蛤养殖水质监测的物联网无人船设计[J].木工机床,2021(03):7-9.
[16] 谭平玉.无人船水质监测系统设计与应用研究[J].科学技术创新,2021(15):58-60.
[17] 蒋星宇. 一种水质监测无人船系统的设计与实现[D].南京信息工程大学,2018.
[18] 贾治平.无人船测深系统在水下地形测量中的应用[J].经纬天地,2021(04):20-23.
[19] 陈俊任,周晓华.无人船测量系统在水下地形测量中的应用[J].测绘技术装备,2020,22(04):65-68.
[20] 李远芳,张莉,陈钜龙.水下无人船构建海洋环境监测系统研究[J].舰船科学技术,2021,43(10):166-168.
[21] 金久才,张杰,邵峰,崔廷伟.一种海洋环境监测无人船系统及其海洋应用[J].海岸工程,2015,34(03):87-92.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)