代码地址:https://github.com/iwatake2222/rotation_master
在线查看工具
https://iwatake2222.github.io/rotation_master/rotation_master.html
使用说明
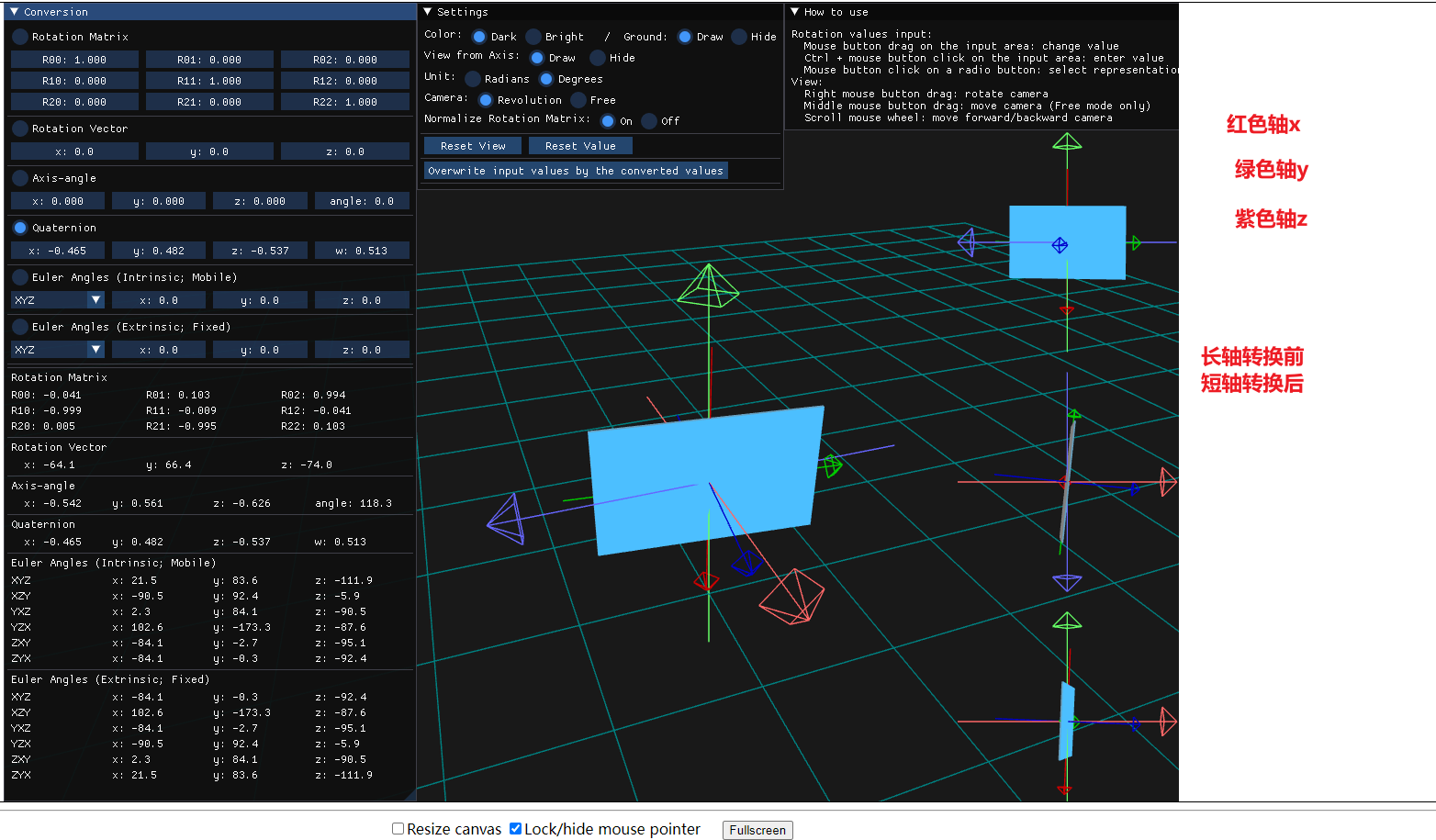
点击数据到四元数那里,输入四元数。
环境配置
https://github.com/iwatake2222/rotation_master/wiki/How-to-Use
apt install -y libglu1-mesa-dev mesa-common-dev libxrandr-dev libxinerama-dev libxcursor-dev libxi-dev
mkdir build
cd build
cmake ..
make
运行
./rotation_master
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)