1.查看需要的/camera/imu的topic内容格式:
-roscore
-rosbag play <.bag>
-rostopic list
-rostopic echo <topic>

2. 对齐XJ2.bag中的IMUtopic信息:
1、查看.bag中的信息topics:
rosbag info XJ2.bag
- Accel和Gyro的数据没对齐,数据量不对


- XJ2.bag中的topics:
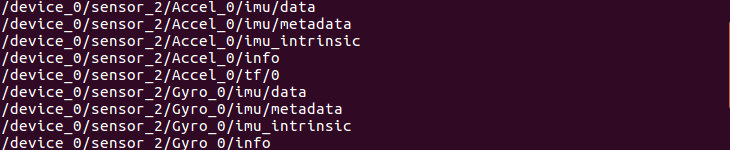
2、对应IMU的topic:Accel_0和Gyro_0内容
rostopic echo /device_0/sensor_2/Gyro_0/imu/data
rostopic echo /device_0/sensor_2/Accel_0/imu/data
- Accel_0:有线速度数据linear_acceleration

- Gyro_0:有角速度数据angular_velocity

3、根据博客(https://blog.csdn.net/qq_36170626/article/details/105155264)合并两个topic为一个:imu/data
4、利用生成的topic数据运行VINS-Mono
-rosrun fusion_sensor fusion_sensor_node
-rosbag play XJ2.bag
-roslaunch vins_estimator realsense_color.launch
-roslaunch vins_estimator vins_rviz.launch
-rostopic list -v #查看话题
3. 配置相机和IMU参数
1、IMU内参标定
(参考:https://blog.csdn.net/Hanghang_/article/details/103546033?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522162950968116780366527324%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=162950968116780366527324&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v29_ecpm-4-103546033.pc_search_download_positive&utm_term=%E5%AE%89%E8%A3%85D435i%E6%B2%A1%E6%9C%89%E5%8F%91%E5%B8%83IMU%E6%95%B0%E6%8D%AE&spm=1018.2226.3001.4187)
2、IMU和相机外参标定
(参考:https://www.cnblogs.com/jimchen1218/p/12778121.html)
4.直接用相机运行VINS-Mono
(参考:https://zhuanlan.zhihu.com/p/390933690)设置参数
-roslaunch realsense2_camera rs_camera.launch
-roslaunch vins_estimator realsense_color.launch
-roslaunch vins_estimator vins_rviz.launch
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)