*Z410-4B入门二次开发平台 * 经过近1年的反复测试,Z410升级树莓派4B的机型终于和大家见面了! Z410机型设计的初衷,就是想为大家提供一款基础的、开源的、高性价比、可扩展、可进行二次开发的无人机。通过它来引导大家了解和熟悉现在优秀的开源项目Ardupolit,以及开源硬件pixhawk。在此基础上结合自己研究的具体项目,从而开发更多更丰富的无人机应用。  Z410搭载树莓派3B+的机型自上架以来,受到了大家的一致认可。它包含了无人机入门及扩展机载电脑的基本知识。让大家对无人机的系统有了清晰的了解,可满足了二次开发的要求。
Z410搭载树莓派3B+的机型自上架以来,受到了大家的一致认可。它包含了无人机入门及扩展机载电脑的基本知识。让大家对无人机的系统有了清晰的了解,可满足了二次开发的要求。
产品特点
1、升级树莓派4B开发板,性能更优 硬件性能在不断提升,开源系统也在不断优化,这些都驱使我们升级4B是必然的选择。 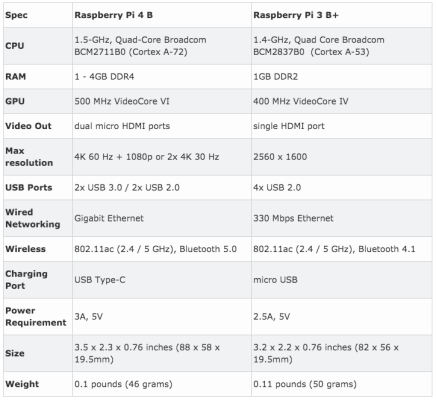 性能详细对比可参考: https://shumeipai.nxez.com/2019/06/26/raspberry-pi-4-review-the-new-gold-standard-for-single-board-computing.html 2、机架坚固耐摔 4B版本依然继承了上一代机架坚固耐摔的优点,这点在做开发测试时尤其重要。
性能详细对比可参考: https://shumeipai.nxez.com/2019/06/26/raspberry-pi-4-review-the-new-gold-standard-for-single-board-computing.html 2、机架坚固耐摔 4B版本依然继承了上一代机架坚固耐摔的优点,这点在做开发测试时尤其重要。  3、布局合理 组装过程中优化了走线和布局,更改了一些不必要的镂空和开孔。一切的目的,都为着便于使用而来。
3、布局合理 组装过程中优化了走线和布局,更改了一些不必要的镂空和开孔。一切的目的,都为着便于使用而来。  产品特点
产品特点
在使用过程中,我们不断收集大家的反馈:网络连接繁琐,室外测试不方便;没有视频回传,想处理视频需要单独安装摄像头...针对以上这些问题,我们在4B系统中做了更多功能的集成。与第一代3b+开发平台相比,新增以下功能:
- 树莓派4B安装了现在最新的开源系统ubuntu20.04,相较于ubuntu mate系统更为流畅; 2、机架坚固耐摔 4B版本依然继承了上一代机架坚固耐摔的优点,这点在做开发测试时尤其重要。
 3、布局合理 组装过程中优化了走线和布局,更改了一些不必要的镂空和开孔。一切的目的,都为着便于使用而来。
3、布局合理 组装过程中优化了走线和布局,更改了一些不必要的镂空和开孔。一切的目的,都为着便于使用而来。 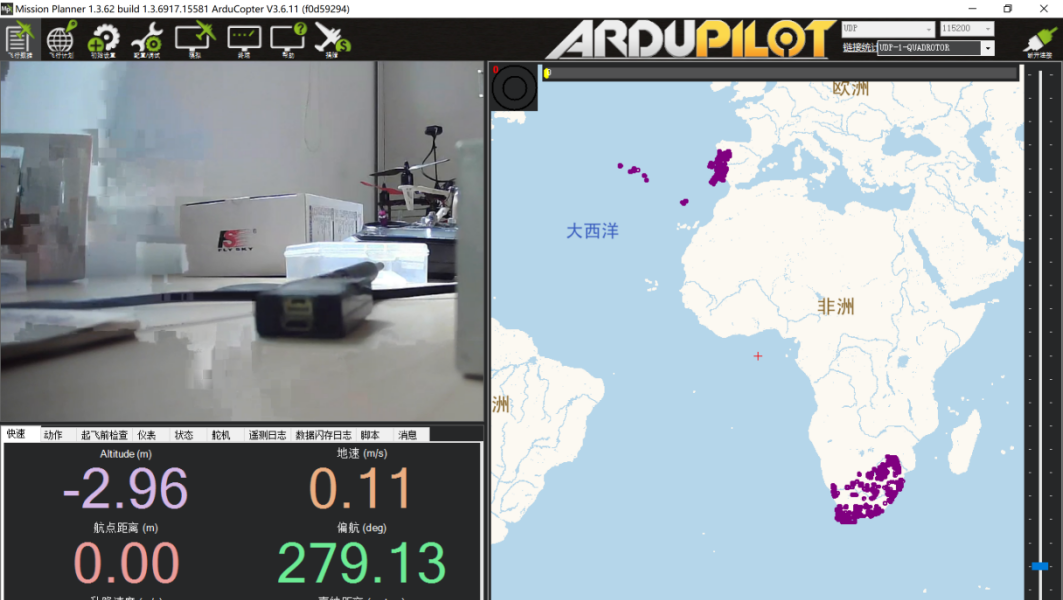
4B版本6大功能升级 在使用过程中,我们不断收集大家的反馈:网络连接繁琐,室外测试不方便;没有视频回传,想处理视频需要单独安装摄像头...针对以上这些问题,我们在4B系统中做了更多功能的集成。与第一代3b+开发平台相比,新增以下功能:
- 树莓派4B安装了现在最新的开源系统ubuntu20.04,相较于ubuntu mate系统更为流畅;
- 使用4B的 WiFi热点自建局域网,室外测试不用再额外使用路由器。PC端可直接连接4B的WIFI热点,通过SSH命令远程连接树莓派;避免了一代系统配置网络的繁琐,新手更容易操作;
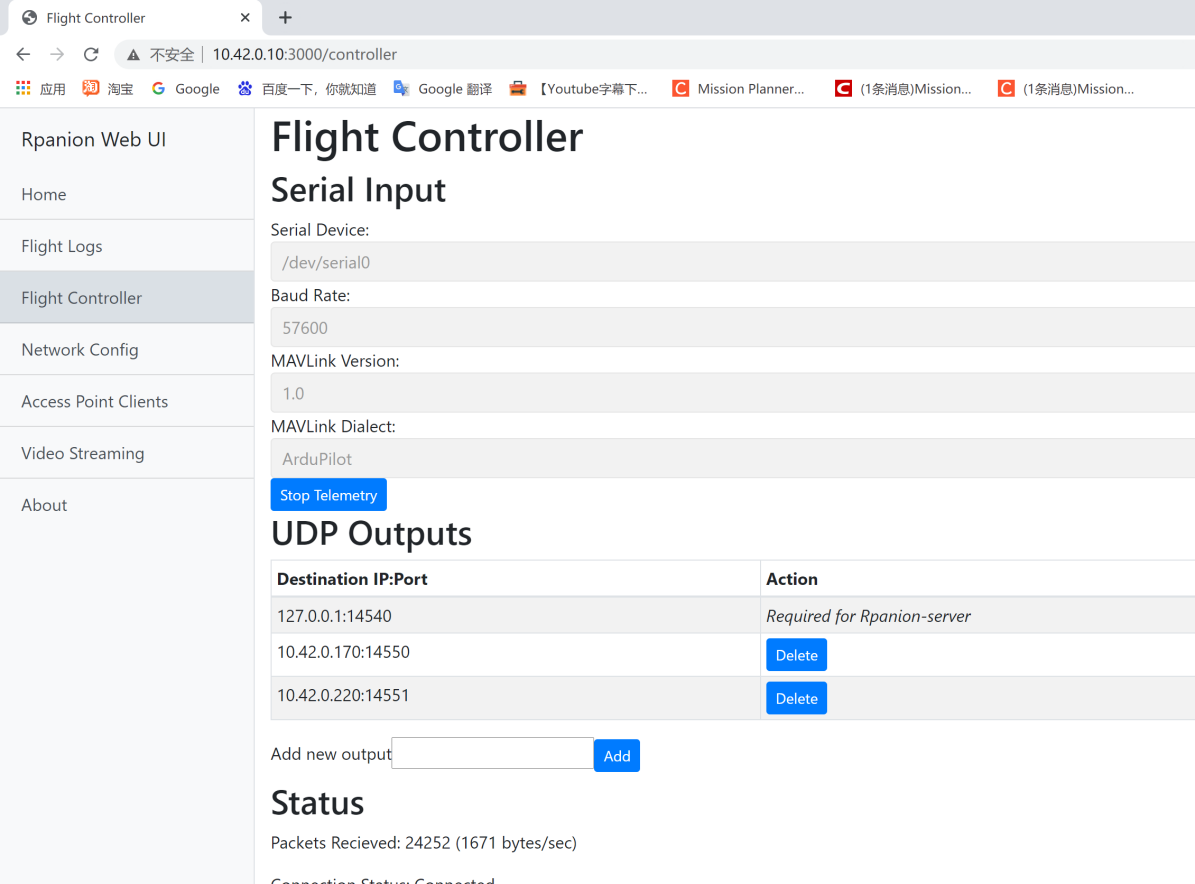
- 4B集成了数传遥测功能。当PC端连接上4B的WIFI热点后,通web浏览器访问10.42.0.10:3000,即可开启数传功能;
打开MP地面站后,通过UDP连接即可将飞控数据回传到电脑地面站。同理也可将手机连接到此热点,进行收手机地面站操作;
- 新增了单目摄像头套餐,可通过树莓派读取视频流,使用opencv等工具进行视觉处理;也可将实时高清视频流回传到PC端处理,或则回传到手机查看;
- 4B具备USB3.0接口,可通过rs-capture等工具,在PC端观察到T265的鱼眼图像(也支持D435i)。这在3B+上是无法实现的;

- 进一步优化了定位参数,使室内定位更稳定;
*技术参数 * 硬件配置:(视觉版)
机架:410全碳纤维
飞控:pixhawk2.4.8
GPS:SE100
遥控器:富斯I6配IA6B接收机
机载电脑:树莓派4B(4G版)
单目摄像头:200W高清
双目相机:intel T265
电池:3S 5200mah
充电器:A400
软件配置:
ubuntu20.04:最新版ubuntu系统
Dronekit-python:编程控制无人机的python库
ROS(Noetic)/mavros:机器人系统,可通过mavros编程控制无人机
Opencv:视觉处理
mavlink-router:mavlink路由
Gstramer:视频传输
教程齐全、通俗易懂
在系统集成测试的同时,我们也在细化教程的描述,尽可能做到文字加视频的结合,让大家更容易接受;  基于开源系统的庞大分支和知识面,还有大家对无人机系统的理解,应用方向的不同,我们无法做到面面俱到的售后技术支持。但我们会根据大家遇到问题的难易程度,提供能力范围内力所能及的指导。同时为了满足不同需求的同学,我们也组建了 Z410树莓派无人机兴趣技术交流群,希望大家在各自专业的领域相互帮助,相互探讨在使用中遇到的问题和处理方法。从而让更多的同学通过这款机型,学习到想要知识,达到自己想要的功能。
基于开源系统的庞大分支和知识面,还有大家对无人机系统的理解,应用方向的不同,我们无法做到面面俱到的售后技术支持。但我们会根据大家遇到问题的难易程度,提供能力范围内力所能及的指导。同时为了满足不同需求的同学,我们也组建了 Z410树莓派无人机兴趣技术交流群,希望大家在各自专业的领域相互帮助,相互探讨在使用中遇到的问题和处理方法。从而让更多的同学通过这款机型,学习到想要知识,达到自己想要的功能。
学无止境,探索不停!随着开源项目的不断发展,我们也会一如既往的,将更多的功能和优化加入其中。我们会不定期在公众号或则论坛发表Z410机型更新教程。让越来越多喜欢开源,喜欢无人机的朋友加入进来。希望这款机型能给大家带来新的体验! 详细查看:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-22617251051.11.47fd2bd4zgdtCi&id=616344442145 功能视频原文查看:https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247508165&idx=1&sn=943e3bef25ab04ad0621d1124fd7f328&chksm=970e7dd8a079f4cec1f6d883c2e0cf5a5dd997ccb47c51aeb5bbf08b55ba072f4c39ee74fcb7&token=897670441&lang=zh_CN#rd
阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)