 1、概述 无人机自诞生以来,主要应用于军事方面,作为智能化和信息化的武器,无人机在侦察、监视、通信、远距离攻击等方面发挥了重要的作用。近年来,无人机在民用方面的应用也越来越多,各国在无人机的民用方面逐渐开放,无人机已经广泛应用于公共安全、应急搜救、农林、环保、交通、通信、气象、影视航拍等多个领域。
1、概述 无人机自诞生以来,主要应用于军事方面,作为智能化和信息化的武器,无人机在侦察、监视、通信、远距离攻击等方面发挥了重要的作用。近年来,无人机在民用方面的应用也越来越多,各国在无人机的民用方面逐渐开放,无人机已经广泛应用于公共安全、应急搜救、农林、环保、交通、通信、气象、影视航拍等多个领域。
随着无人机在生产生活中逐渐获得更大的用途,特别是近年来诞生了无人机固定机场和移动机场,对无人机的精准识别和降落的要求也就越来越高。
现阶段应用较多的无人机精准降落方案主要有:RTK GPS和图像识别(视觉)。
2. 基于RTK GPS的无人机精准降落方案 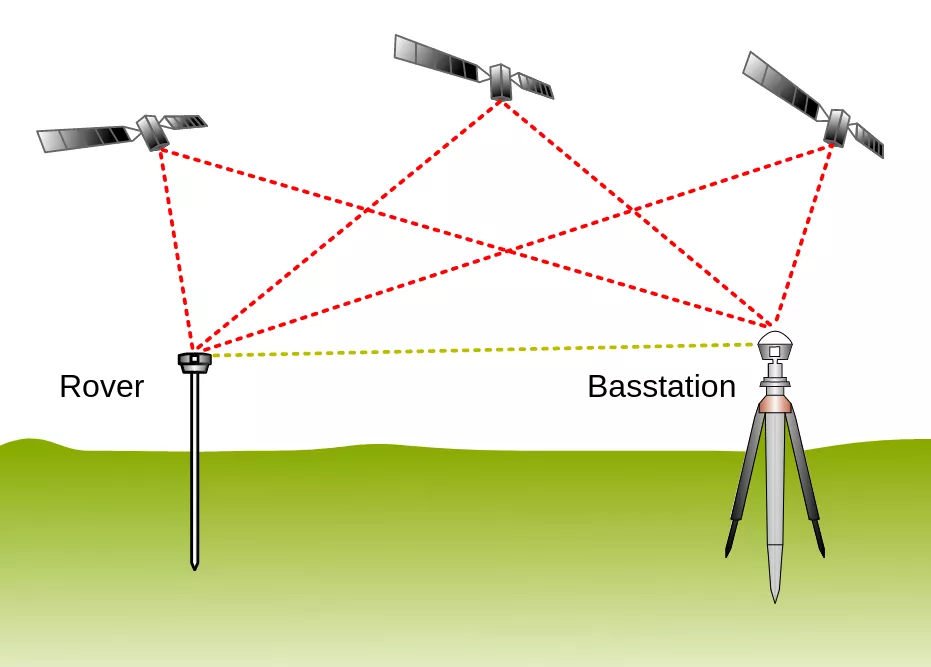
RTK 有两个重要概念:固定站(也就参考站)和移动站。固定站顾名思义就是固定在地面上为移动站提供参考基准的基站,在使用过程中不可移动,固定基站、云基站和移动基站都是固定站;移动站是进行作业的设备,它使用固定站发送来的差分数据进行 RTK 精准定位,无人机和测绘器都是移动站。
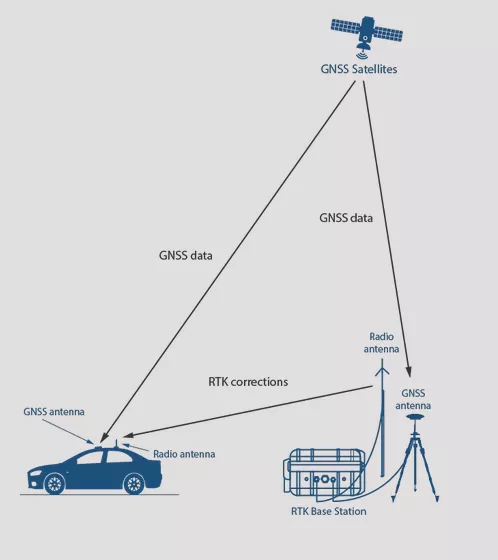
RTK(Real Time Kinematic)实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTD GPS)技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。 在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。
无人机通过RTK GPS实现无人机精准降落的方式主要依靠RTK GPS定位精度可达厘米级这一特性实现的。只需要给定精准的目标降落位置,再结合无人机自身精准的实时位置即可实现无人机精准降落。(与视觉相比)缺点就是:系统需要依赖的组件多(移动站、固定站、天线、无线数传等),成本昂贵。
3、基于图像识别(视觉)的无人机精准降落方案 另一种实现无人机精准降落的方法是基于图像识别(视觉)。其中,也有多种不同的实现方式,比如:通过识别apritag或者aruco的方式;通过深度学习识别图像特征;通过识别红外LED灯珠等。
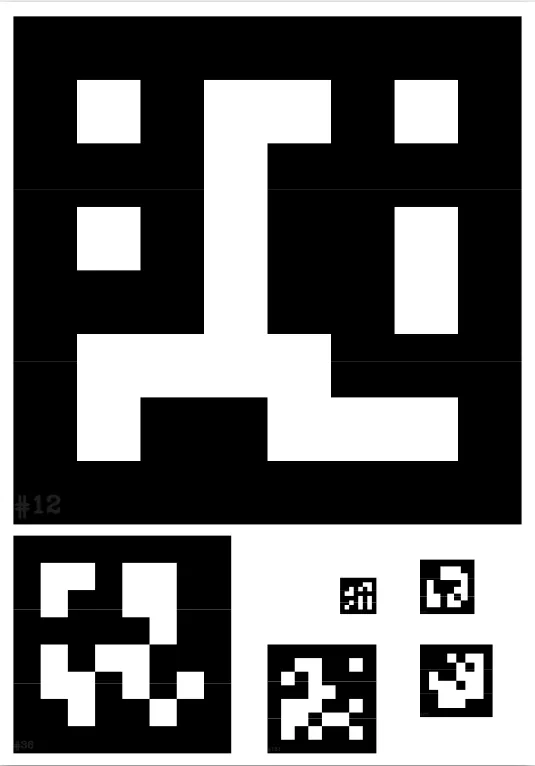
3.1、基于Apritag或者Aruco https://april.eecs.umich.edu/software/apriltag.html http://www.uco.es/investiga/grupos/ava/node/26
AprilTag/Aruco是一个视觉基准库,在AR,机器人,相机校准领域广泛使用。通过特定的标志(与二维码相似,但是降低了复杂度以满足实时性要求),可以快速地检测标志,并计算相对位姿。
3.2 基于识别红外LED灯珠的方式
与基于apritag或者aruco不同,基于识别红外灯珠的方式得到的是像素的相对偏移量,而不是直接就可以得到相对位置,因此基于这种方式实现的精准降落还必须配备一个Z轴的测距传感器才可准确估计出水平的相对位置,从而实现无人机的精准降落。
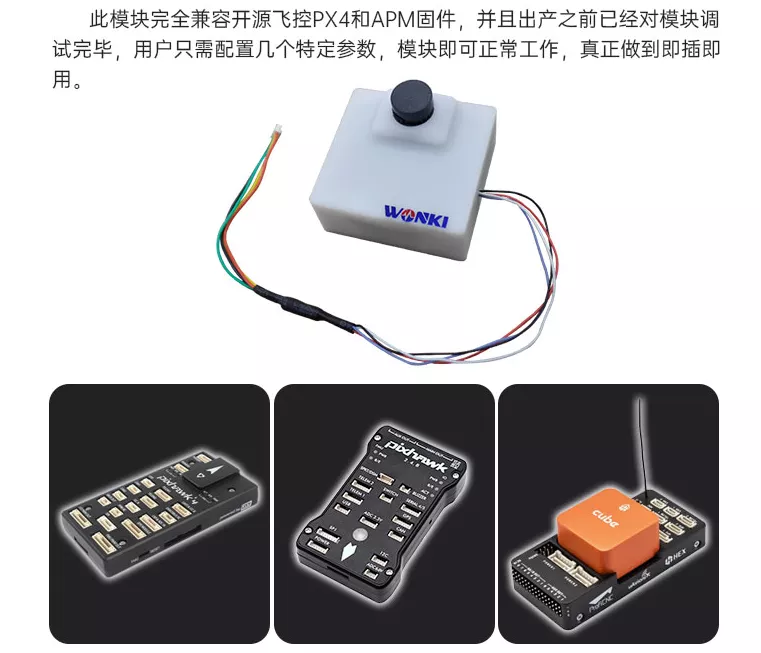
阿木实验室的精准降落模块就是基于识别红外LED灯珠的方式实现的。 模块分为两个部分:单目相机和红外信标
- 单目相机使用主频为204MHz的双核处理器,并且搭配一颗FOV为90度的镜头,里面运行了基于色调的快速图像跟踪算法。
- 红外信标由30颗波长为900nm的红外LED灯矩阵组成。单目相机最远可在20米左右的距离就可追踪到红外信标的红外光源。
由于红外信标是主动光源,相比于其他视觉方案,可在白天或者夜间都可进行视觉识别。 
视频演示: https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247515263&idx=1&sn=b713ee0548233d6d53fa43a671e991c5&chksm=970e6162a079e874b03ff404fea1d6cdb0924d4690161545c4b79ca0340a7f701ae07408cb9c&token=1415261896&lang=zh_CN#rd
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)