方案基本介绍 阿木实验室自2016年起,就以PX4开源无人机为中心在多所高校举办过线下无人机实训课程,可以说对开源无人机和智能机器人技术的分享和传播是阿木实验室的原点。经过数年的发展,阿木实验室已经成为了集开源项目运营、机器人开发套件设计与人工智能教学资源生产为一体的综合性团队。在此过程中,我们不仅积累了丰富的无人机与人工智能教学资源与课件,同时也注意到智能机器人行业日新月异的更迭速度,使高等教育单位面临着教学资源溃泛、中文资料太少以及缺乏具备专业知识的师资力量等问题,很难针对性的开展对应的教学课程和专业建设。  为此,阿木实验室结合多年来的无人机教学经验,搭配我们运营多年的开源项目、无人机开发套件、在线视频课程资源和所能提供的师资培训、技术交流社区等服务,为高等教育单位量身设计了无人机专业课程建设方案。旨在一站式的为高等教育解决无人机专业课程开展和建设的难题。
为此,阿木实验室结合多年来的无人机教学经验,搭配我们运营多年的开源项目、无人机开发套件、在线视频课程资源和所能提供的师资培训、技术交流社区等服务,为高等教育单位量身设计了无人机专业课程建设方案。旨在一站式的为高等教育解决无人机专业课程开展和建设的难题。
课程内容概括 本专业开发课程方案是阿木实验室基于多年的无人机线下教学经验与线上课程资源,专为高等教育中的无人机竞赛、机器人专业课程和人工智能实验室建设所设计的一套全方位课程教育体系建设方案。本方案以智能无人机开发套件和课程资源为核心,结合课堂教学+实践操作的教学模式,涉及无人机组装、飞控调试、在环仿真、ROS框架开发、深度学习、机器视觉和智能机器人设计等内容,适合致力于机器人和无人机领域的电气、机械、航天、计算机和自动化专业的高等教育学生。 
阿木实验室的无人机课程专业建设方案可根据学习内容分为两大种类: 1.《基于树莓派的无人机开发与实践》 课程内容:基于树莓派的智能无人机开发套件;智能无人机设计入门;树莓派开发;Ardupilot飞控;机器视觉基础。
课程方向:基于树莓派+Ardupilot开源飞控的无人机开发套件,可进行开源飞控开发的入门学习,以及在树莓派中通过编程实现软件对无人机的自主控制。同时包含基于视觉传感器的无人机定位与机器视觉基础等内容。适合进行基本、轻量化的智能无人机开发。
适合学生:以飞行器控制为方向的嵌入式、自动化相关专业的大二下学期到大四学生为主,兼顾相关研究方向的硕博学生。  《基于树莓派的无人机开发与实践》
《基于树莓派的无人机开发与实践》
2.《ROS智能多旋翼无人机开发课程》 课程内容:基于ROS的科研无人机二次开发平台套件;智能自主无人机设计;ROS机器人操作系统开发;PX4飞控开发;机器视觉开发;人工智能开发;深度学习开发。
课程方向:基于PX4飞控+英伟达边缘计算模块,具备完整上位ROS操作系统的空中机器人开发套件。可在已经集成了视觉VIO、SLAM、自主避障、视觉识别和任务规划算法的ROS系统中直接进行二次开发。课程中包含了ROS、人工智能与深度学习框架的内容。适合进行算法层面的学习和人工智能领域的深入开发。
适合学生:以飞行器自主飞行与人工智能为方向的电子信息工程、飞行器设计、计算机嵌入式、自动化等专业相关专业的大四学生到研究生为主,兼顾相关研究方向的博士生。  《ROS智能多旋翼无人机开发课程》
《ROS智能多旋翼无人机开发课程》
 方案包含资料:课程视频;授课课件PPT;课程讲义资料;实验课实训手册;源代码/软件资料;课程习题。
方案包含资料:课程视频;授课课件PPT;课程讲义资料;实验课实训手册;源代码/软件资料;课程习题。 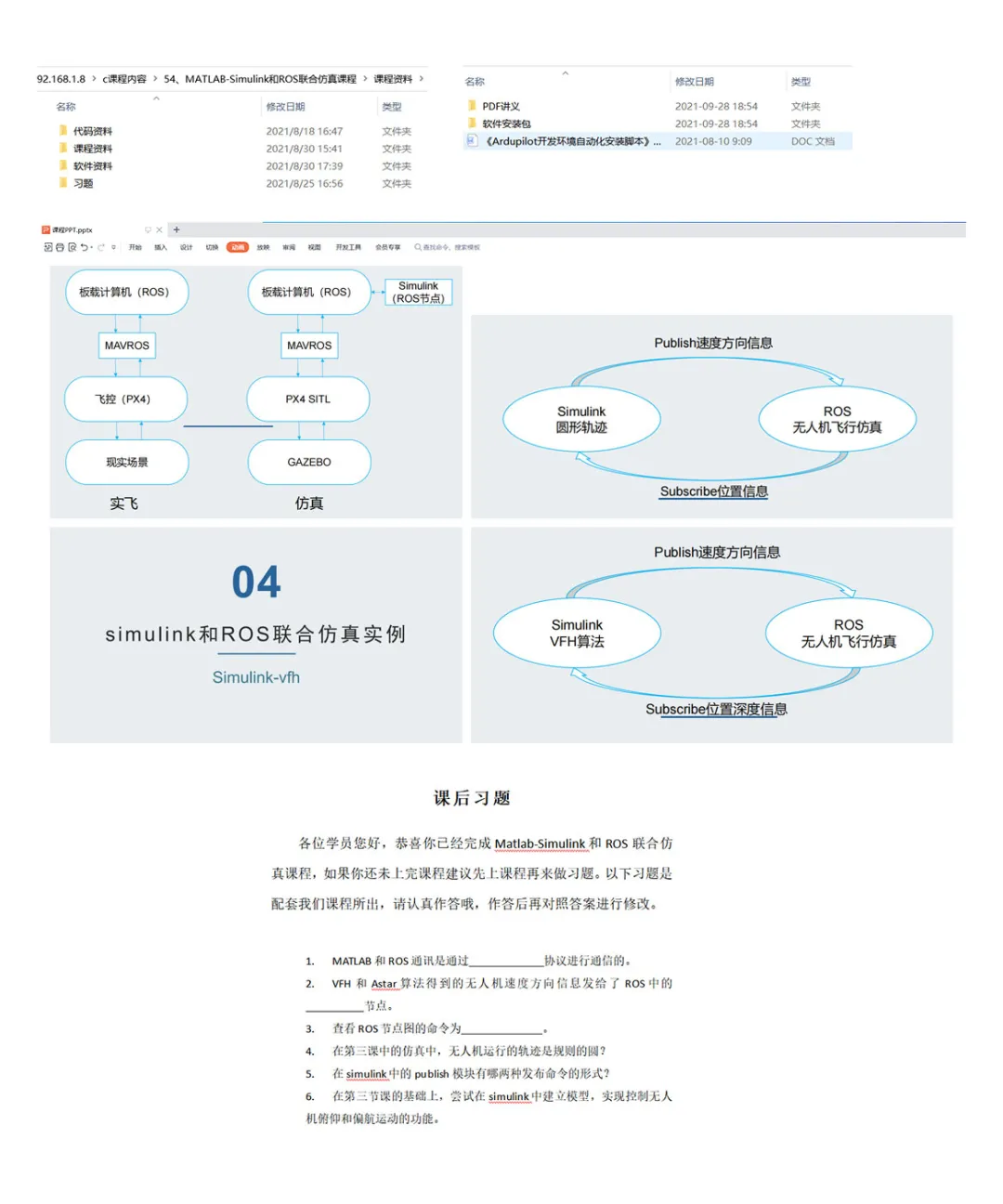
课程大纲预览 《基于树莓派的无人机开发与实践》《ROS智能多旋翼无人机开发课程》 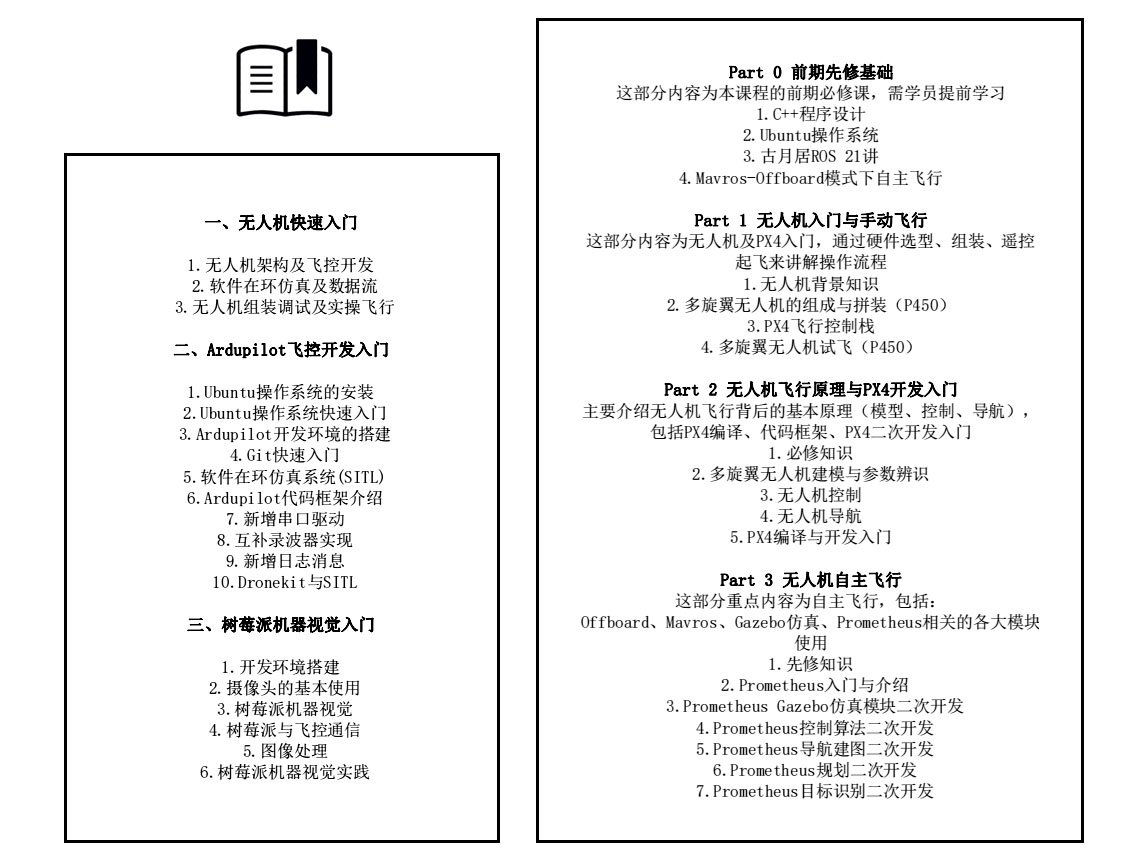
其他服务 教学服务一直是阿木实验室关心的方面,除了教学资料和无人机套件外,还会提供如下服务:
- 每月提供无人机线下实训名额
- 协助客户完成后期课程体系建设、师资团队建设并提供师资培训服务
- 提供资深技术人员到客户现场进行交流讲座
- 为客户单位所属学生提供暑期培训或实习名额
除此以外,本方案完全基于阿木实验室的技术社区建立。通过阿木实验室的技术体系,为用户带来如下优势:
- 提供网络交流平台,学生可与其他学校相同专业学生相互交流,其中也有官方工程师做技术支持,可随时在线解决问题。
- 可利用现有手册协助客户修改及出版无人机专业相关教材。
- 可利用现有手册协助客户修改及出版无人机专业相关教材。
- 阿木实验室后续关于无人机的新技术,可优先引入到客户教学体系中。
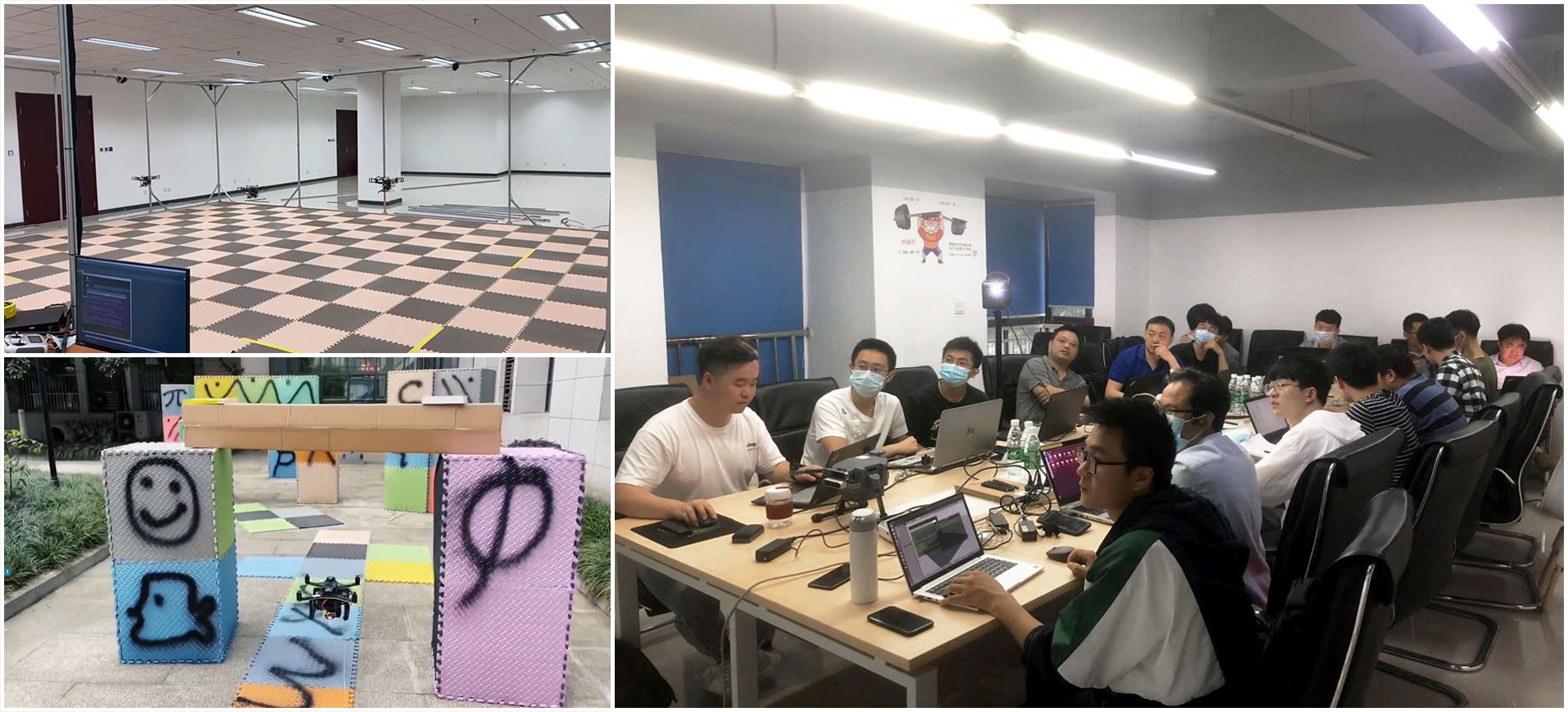
客户案例展示 

阿木实验室技术社区及课程体系展示
阿木实验室多年来致力于开源机器人项目运营及技术的推广,并将技术经验编撰、汇总为在线视频课程资源,同时提供开源机器人开发套件供客户使用。本文介绍方案完全基于阿木实验室的技术体系,您可以在下方的链接中了解到关于阿木实验室的一切:
阿木实验室官网:https://www.amovlab.com/zh-CN
阿木社区论坛:https://bbs.amovlab.com/
阿木实验室在线课程(机器人开发课程):https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video
Prometheus开源无人机项目主页:https://github.com/amov-lab/Prometheus
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)