主机配置
一台运行Ubuntu 20.04 (Server)的主机,本文主机不带界面,通过SSH远程连接。
硬件接口概述
建议阅读官方用户手册,篇幅不长。
重点:
- Nvidia Jetson NX Developer Kit官方套件上没有外部存储模块,需要自备microSD卡
• You need a 16 GB or larger UHS-1 microSD card, HDMI™ or DP monitor, USB keyboard, and mouse. - 安装系统时需要短接[J14]上的9和10管脚将模块置于强制恢复模式,具体位置在用户手册上提供

系统安装
参考官方QuickStart
执行脚本过程中安装了qemu和一个库(忘了叫什么了),核心思想是执行脚本时如果出错,报告需要apt-get install什么,就sudo安装什么。
安装qemu的命令为sudo apt-get install qemu-user-static,出错时脚本会提供提示:
ERROR qemu not found! To install - please run: "sudo apt-get install qemu-user-static
以下总结翻译官方安装教程:
硬件连接
- 不接电源
- microUSB接主机USB口,为此需要准备一条microUSB转你的主机能接的口
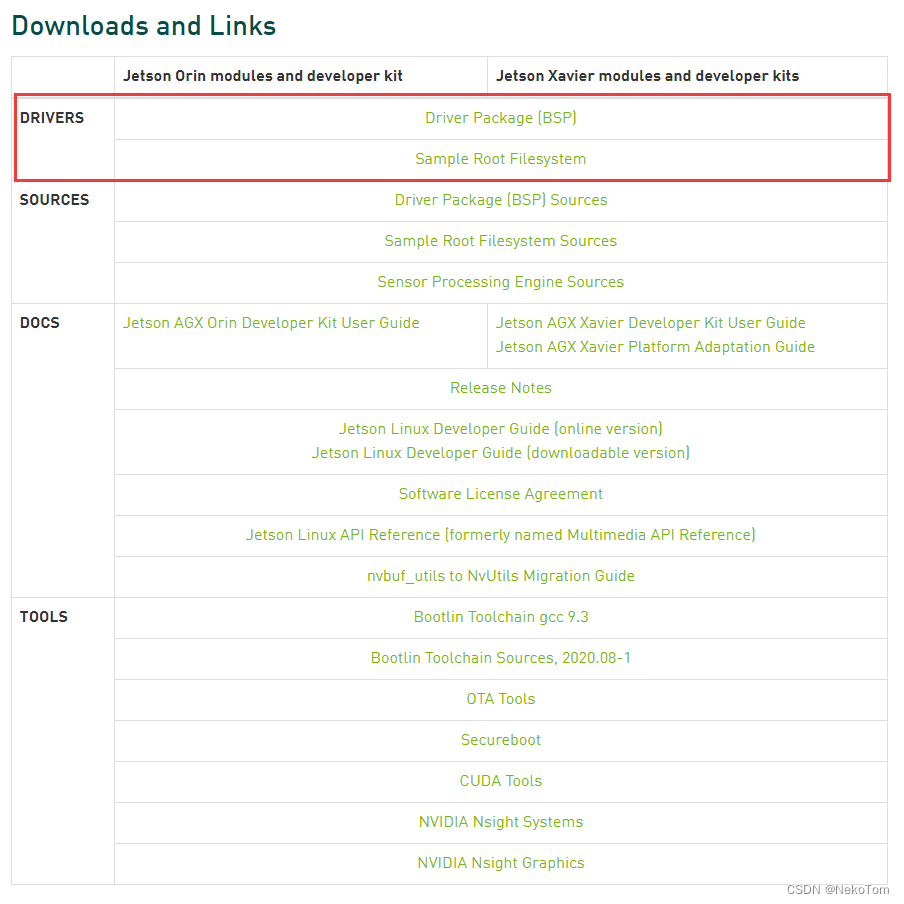
安装包下载
下载链接
本文中使用的是Jetson Linux 35.1,点开以后,页面底部有下载链接,选择下载Drivers的两项,驱动包和根文件系统。
环境变量
这里我设置失败了,但不要紧,也可以不设置
三条环境变量:
${L4T_RELEASE_PACKAGE}=你的Jetson Linux发行包路径,类似Jetson_Linux_R35.1.0_aarch64.tbz2${SAMPLE_FS_PACKAGE}=你的根文件系统包路径,类似Tegra_Linux_Sample-Root-Filesystem_R35.1.0_aarch64.tbz2${BOARD}=jetson-xavier-nx-devkit
注:只要你的当前目录下和下图一样(没有Linux_for_Tegra),就用以上值即可,但要注意版本。

刷(flush)系统
- 解压并组装根文件系统
$ tar xf ${L4T_RELEASE_PACKAGE}
$ cd Linux_for_Tegra/rootfs/
$ sudo tar xpf ../../${SAMPLE_FS_PACKAGE}
$ cd ..
$ sudo ./apply_binaries.sh
环境变量一节已经提过,环境变量不设置也没关系。如果未设置,把以上命令中出现的环境变量值直接替换${L4T_RELEASE_PACKAGE}等三项即可。注意:该打的sudo记得打,有条件的话也可以在root用户下执行整个流程,我有一次就在安装过程中出现了权限问题,不确定是否与没开root用户有关。 - 不用找了,Nvidia Xavier NX开发者套件没有按钮。
- 确保板子断电
- 确保已经插入合适的microSD卡
- 短接[J14]的引脚9和10(FC REC和GND)
- 上电
- 拆掉短接线
- 按照链接检查是否处于恢复模式(我没检查)。
- 执行刷系统脚本
$ sudo ./flash.sh ${BOARD} mmcblk0p1
刷完会重启,可能报错nvidia jetson nx failed to start refresh fwupd metadata and update motd
等等问题,我的解决方法是直接拔电源重新上电。
其他配置
换源参考技术无产者的博客,不能使用阿里源,此处使用中科大源:
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ focal main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main multiverse restricted universe
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)