最近一直在弄关于SBUS的编码与解码这方面的内容,虽然网上资料很多,但是网上资料太杂,我找的一些资料可能是我理解的问题,所以我摒弃了一些骚操作,对于一些单片机学得不精的人来说,有些地方是值得注意的。
对于SBUS的探索,首先我个人是使用51芯片的遥控器通过NRF24L01发送遥控器PWM模拟量到一块STM32F030的接收机,在接收机内进行PWM转SBUS的操作,之后通过串口发送出SBUS信号,用F4飞控来连接串口发送出来的SBUS信号,并检验信号是否正确。(虽然这样挺麻烦的,但是检验起来很方便)
1.九位数据位、偶校验
SBUS本质是一种串口通信协议,采用100K的波特率,8位数据位,两位停止位,偶效验,即8E2的串口通信。
这里对于单片机学得不精的人来说特别容易搞混,波特率100000,两位停止位没什么问题。问题在于8位数据位,偶校验,这段话在单片机中却需要这样子表达9位数据位、偶校验。对没有错是9位数据位、偶校验。刚开始编码的时候我就一直卡在了这里,F4的飞控一直识别不了我编码的SBUS信号。原因如下:
/* 如果需要8位数据,无奇偶校验,则数据长度=8
如果需要8位数据,有奇偶校验,则数据长度=9*/
所以,关于串口端的设置,代码如下:
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 100000; //设定传输速率
USART_InitStructure.USART_WordLength = USART_WordLength_9b; //设定传输数据位数
USART_InitStructure.USART_StopBits = USART_StopBits_2; //设定停止位个数——2位
USART_InitStructure.USART_Parity = USART_Parity_Even ; //偶校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不用流量控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //使用接收和发送功能
USART_Init(USART1, &USART_InitStructure); //初始化USART1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能USART1接收中断
USART_Cmd(USART1, ENABLE); //使能USART1
2.SBUS采用负逻辑
所以需要硬件取反才能识别出来,软件取反试过通过示波器观察与硬件取反并不是一致的(起始电平),具体解决方法和原因我没深查。所以需要输出SBUS信号必须硬件取反
电路如下,三极管使用8050就行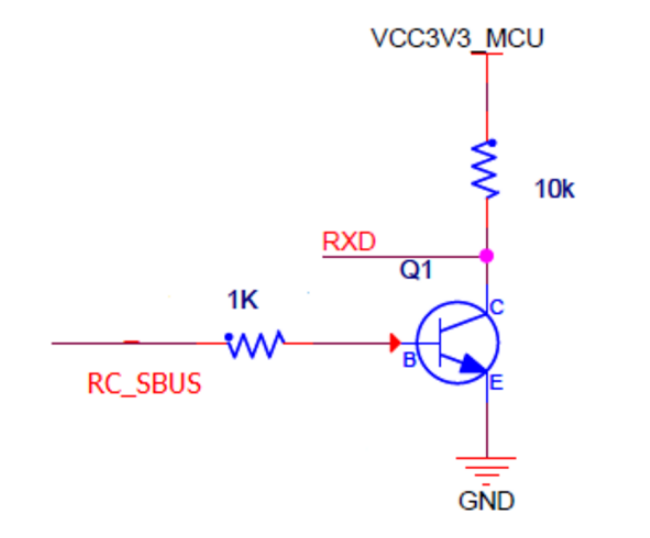
3.SBUS的两种工作模式
高速模式:每4ms发送一次
低速模式:每14ms发送一次
就是说每间隔4或者14ms这个串口就发送25个字节的数据,高低速模式并不影响F4飞控对于SBUS信号的识别,所以只需设置多一个定时器定时发送SBUS信号即可。
100K的波特率不是标准波特率可以用单片机读取。我用F4飞控来识别单片机发出的SBUS信号之后在电脑端通过Betaflight Configurator来观察SBUS信号情况,能很直观的反映出SBUS信号是否正常
4.SBUS编码
帧格式【参考https://mbed.org/users/Digixx/notebook/futaba-s-bus-controlled-by-mbed/ 】
每帧25个字节,关于每帧的帧格式,我的理解就是第一帧为识别帧固定为:0x0F,然后最后两帧都为0x00
编码代码如下:
uint8_t sbus_data[25]={0x0f,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
uint16_t ChValue[16]//通道数据,即遥控器发送过来的PWM
//PWM转SBUS
// SBUS header
sbus_data[0] = 0x0F;
// 16 ChValue of 11 bit data
sbus_data[1] = (unsigned char) ((ChValue[0] & 0x07FF));
sbus_data[2] = (unsigned char) ((ChValue[0] & 0x07FF)>>8 | (ChValue[1] & 0x07FF)<<3);
sbus_data[3] = (unsigned char) ((ChValue[1] & 0x07FF)>>5 | (ChValue[2] & 0x07FF)<<6);
sbus_data[4] = (unsigned char) ((ChValue[2] & 0x07FF)>>2);
sbus_data[5] = (unsigned char) ((ChValue[2] & 0x07FF)>>10 | (ChValue[3] & 0x07FF)<<1);
sbus_data[6] = (unsigned char) ((ChValue[3] & 0x07FF)>>7 | (ChValue[4] & 0x07FF)<<4);
sbus_data[7] = (unsigned char) ((ChValue[4] & 0x07FF)>>4 | (ChValue[5] & 0x07FF)<<7);
sbus_data[8] = (unsigned char) ((ChValue[5] & 0x07FF)>>1);
sbus_data[9] = (unsigned char) ((ChValue[5] & 0x07FF)>>9 | (ChValue[6] & 0x07FF)<<2);
sbus_data[10] = (unsigned char) ((ChValue[6] & 0x07FF)>>6 | (ChValue[7] & 0x07FF)<<5);
sbus_data[11] = (unsigned char) ((ChValue[7] & 0x07FF)>>3);
sbus_data[12] = (unsigned char) ((ChValue[8] & 0x07FF));
sbus_data[13] = (unsigned char) ((ChValue[8] & 0x07FF)>>8 | (ChValue[9] & 0x07FF)<<3);
sbus_data[14] = (unsigned char) ((ChValue[9] & 0x07FF)>>5 | (ChValue[10] & 0x07FF)<<6);
sbus_data[15] = (unsigned char) ((ChValue[10] & 0x07FF)>>2);
sbus_data[16] = (unsigned char) ((ChValue[10] & 0x07FF)>>10 | (ChValue[11] & 0x07FF)<<1);
sbus_data[17] = (unsigned char) ((ChValue[11] & 0x07FF)>>7 | (ChValue[12] & 0x07FF)<<4);
sbus_data[18] = (unsigned char) ((ChValue[12] & 0x07FF)>>4 | (ChValue[13] & 0x07FF)<<7);
sbus_data[19] = (unsigned char) ((ChValue[13] & 0x07FF)>>1);
sbus_data[20] = (unsigned char) ((ChValue[13] & 0x07FF)>>9 | (ChValue[14] & 0x07FF)<<2);
sbus_data[21] = (unsigned char) ((ChValue[14] & 0x07FF)>>6 | (ChValue[15] & 0x07FF)<<5);
sbus_data[22] = (unsigned char) ((ChValue[15] & 0x07FF)>>3);
// flags
sbus_data[23] = 0x00;
// footer
sbus_data[24] = 0X00;
对于编码之后校验的方面,我是通过编码之后串口发送出去,用F4飞控来接收发送出来的SBUS信号,然后通过Betaflight Configurator来观察SBUS信号是否规范
5.SBUS解码
解码代码,经过修改并验证后,SBUS信号发出后,用硬件取反接回单片机,接收配置上面有说过,值得注意的就是接收的数组不一定是从第一位开始的,所以需要简单处理一下接收到的数据。检验的说固定遥控器发送的PWM值,然后发送过来解码验证看是否一样即可。解码代码如下:
u16 buffer[25],channels[16];
channels[0] = ((buffer[1] |buffer[2]<<8) & 0x07FF);
channels[1] = ((buffer[2]>>3 |buffer[3]<<5) & 0x07FF);
channels[2] = ((buffer[3]>>6 |buffer[4]<<2 |buffer[5]<<10) & 0x07FF);
channels[3] = ((buffer[5]>>1 |buffer[6]<<7) & 0x07FF);
channels[4] = ((buffer[6]>>4 |buffer[7]<<4) & 0x07FF);
channels[5] = ((buffer[7]>>7 |buffer[8]<<1 |buffer[9]<<9) & 0x07FF);
channels[6] = ((buffer[9]>>2 |buffer[10]<<6) & 0x07FF);
channels[7] = ((buffer[10]>>5|buffer[11]<<3) & 0x07FF);
channels[8] = ((buffer[12] |buffer[13]<<8) & 0x07FF);
channels[9] = ((buffer[13]>>3|buffer[14]<<5) & 0x07FF);
channels[10] = ((buffer[14]>>6|buffer[15]<<2|buffer[16]<<10) & 0x07FF);
channels[11] = ((buffer[16]>>1|buffer[17]<<7) & 0x07FF);
channels[12] = ((buffer[17]>>4|buffer[18]<<4) & 0x07FF);
channels[13] = ((buffer[18]>>7|buffer[19]<<1|buffer[20]<<9) & 0x07FF);
channels[14] = ((buffer[20]>>2|buffer[21]<<6) & 0x07FF);
channels[15] = ((buffer[21]>>5|buffer[22]<<3) & 0x07FF);
感谢来自wsptr【https://blog.csdn.net/wsptr/article/details/53795458】
以及 Bluish White【https://blog.csdn.net/qq_31232793/article/details/80244211】
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)