PID分为位置式PID与增量式PID。
一、位置式PID
1、表达式为:
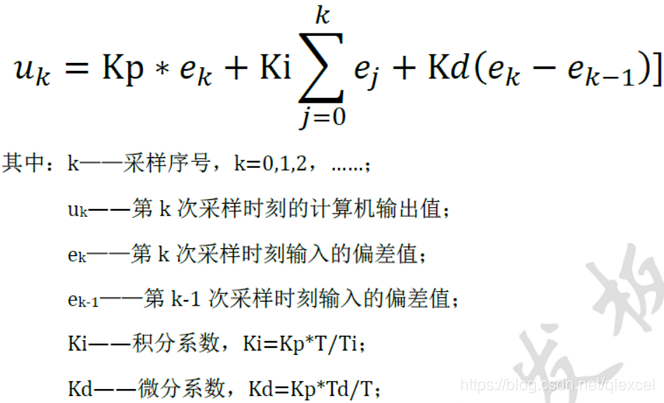
2、缺点:
1)、由于全量输出,所以每次输出均与过去状态有关,计算时要对ek进行累加,工作量大;
2)、因为计算机输出的uk对应的是执行机构的实际位置,如果计算机出现故障,输出的uk将大幅度变化,会引起执行机构的大幅度变化,有可能因此造成严重的生产事故,这在实生产际中是不允许的
3)、如果偏差一直是正的或者负的,位置式PID在积分项会一直累积,因此必须对积分项进行限幅,同时也要对输出进行限幅。当偏差开始反向变化,位置式PID在积分项需要一段时间才能从最大值减下来,造成输出的滞后。
3、总结
由于位置式PID积分项的滞后性,所以使用位置式PID时,一般直接使用PD控制。
位置式 PID 也大多用在执行机构不带积分部件的对象,即PD控制,比如舵机和平衡小车的直立和温控系统的控制。
4、代码
#define PID_INTEGRAL_ON //位置式PID是否包含积分项。如果仅用PD控制,注释本行
typedef struct PID
{
float P;
float I;
float D;
#ifdef PID_INTEGRAL_ON
float Integral; //位置式PID积分项
float IntegralMax; //位置式PID积分项最大值,用于限幅
#endif
float Last_Error; //上一次误差
float OutputMax; //位置式PID输出最大值,用于限幅
}PID;
/**********************************************************************************************************
* 函 数 名:PID_Cal
* 功能说明:位置式PID控制
* 输 入:
NowValue:当前值
AimValue:目标值
* 输 出:PID控制值,直接赋值给执行函数
**********************************************************************************************************/
float PID_Cal(PID *pid, int32_t NowValue, int32_t AimValue)
{
float iError, //当前误差
Output; //控制输出
iError = AimValue - NowValue; //计算当前误差
#ifdef PID_INTEGRAL_ON
pid->Integral += pid->I * iError; //位置式PID积分项累加
pid->Integral = pid->Integral > pid->IntegralMax?pid->IntegralMax:pid->Integral; //积分项上限幅
pid->Integral = pid->Integral <-pid->IntegralMax?-pid->IntegralMax:pid->Integral; //积分项下限幅
#endif
Output = pid->P * iError //比例P
+ pid->D * (iError - pid->Last_Error); //微分D
#ifdef PID_INTEGRAL_ON
Output += pid->Integral; //积分I
#endif
Output = Output > pid->OutputMax?pid->OutputMax:Output; //控制输出上限幅
Output = Output <-pid->OutputMax?-pid->OutputMax:Output; //控制输出下限幅
pid->Last_Error = iError; //更新上次误差,用于下次计算
return Output; //返回控制输出值
}
二、增量式PID
1、表达式为:
当前的控制输出值表达式:

前一时刻的控制输出值表达式:

把两式相减即可得到控制输出值的增量值,也就是增量式PID的表达式:

2、优点
1)、根据增量式PID的表达式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量。而得出的控制量▲uk对应的是近几次位置误差的增量,而不是对应与实际位置的偏差,因此没有误差累加。
2)、增量式PID中不需要累加,计算量小。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作。
3、缺点:
1)、积分截断效应大,有稳态误差;
2)、溢出的影响大。有的被控对象用增量式则不太好;
3、总结
1)、增量式算法不需要做累加,控制量增量的确定仅与最近几次偏差采样值有关,计算误差对控制 量计算的影响较小。而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2)、增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。 而位置式的输出直接对应对象的输出,因此对系统影响较大。
3)、增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4)、在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅。
4、代码
typedef struct PID
{
float P; //Kp系数
float I; //Ki系数
float D; //Kd系数
float OutputMax; //输出最大值,用于限幅
int32_t LastError; //前一次误差
int32_t PrevError; //前两次误差
}PID;
/**********************************************************************************************************
* 函 数 名:IncPIDCal
* 功能说明:增量式PID计算
* 形 参:
* 返 回 值:
**********************************************************************************************************/
float IncPIDCal(PID *pid, int32_t NowValue, int32_t AimValue)
{
int32_t iError; //当前误差值
float Output; //控制输出增量值
iError = AimValue - NowValue; //目标值与当前值之差
Output = (pid->P * iError) //E[k]项
-(pid->I * pid->LastError) //E[k-1]项
+(pid->D * pid->PrevError); //E[k-2]项
pid->PrevError = pid->LastError; //存储误差,用于下次计算
pid->LastError = iError;
Output = Output > pid->OutputMax?pid->OutputMax:Output; //控制输出上限幅
Output = Output <-pid->OutputMax?-pid->OutputMax:Output; //控制输出下限幅
return(Output); //返回增量值
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)