RoboWare Studio是一个ROS集成开发环境。与ROS匹配性比起其他IDE更好,可以用它开发 ROS更加简单、并且在官网ros wiki中有详细的使用教程。本文主要是在Ubuntu18.04中安装RoboWare Studio。
1.输入指令安装必要的编译程序必须软件包
sudo apt-get install build-essential
若果出现错误,提示:
The following packages have unmet dependencies:
roboware-studio : Depends: libgconf-2-4 but it is not going to be installed
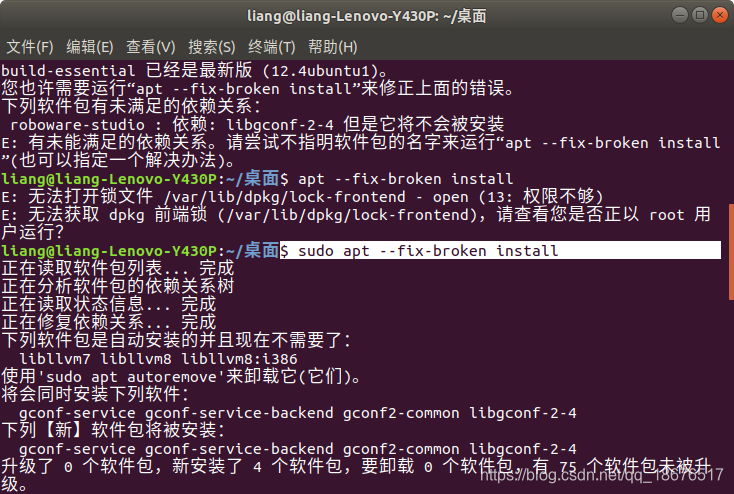
E: Unmet dependencies. Try ‘apt --fix-broken install’ with no packages (or specify a solution).
再输入修复命令
sudo apt --fix-broken install
2.运行下载的deb软件包安装
sudo dpkg -i roboware-studio_1.2.0-1524709819_amd64.deb
3.若是报错,提示缺少依赖项,可针对终端提示的缺少项进行安装,或者执行下面的命令
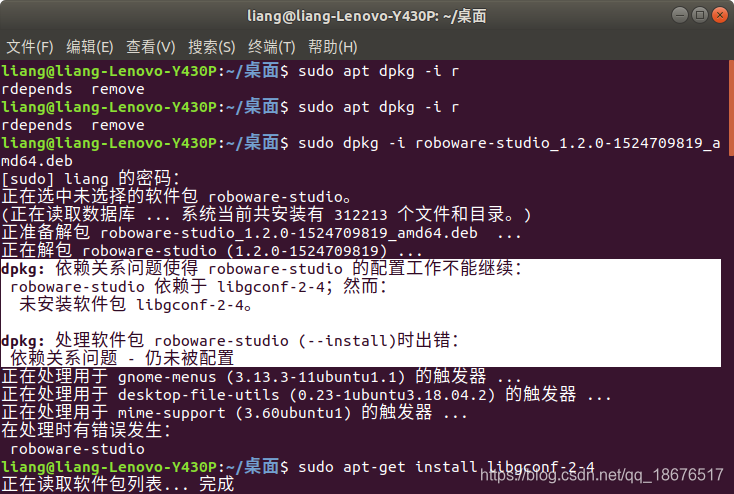
sudo apt --fix-broken install
4.安装成功后在程序入口打开软件

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)