关于虚拟机ubuntu编译程序时报make: warning: Clock skew detected. Your build may be incomplete.问题的解决办法
2023-05-16
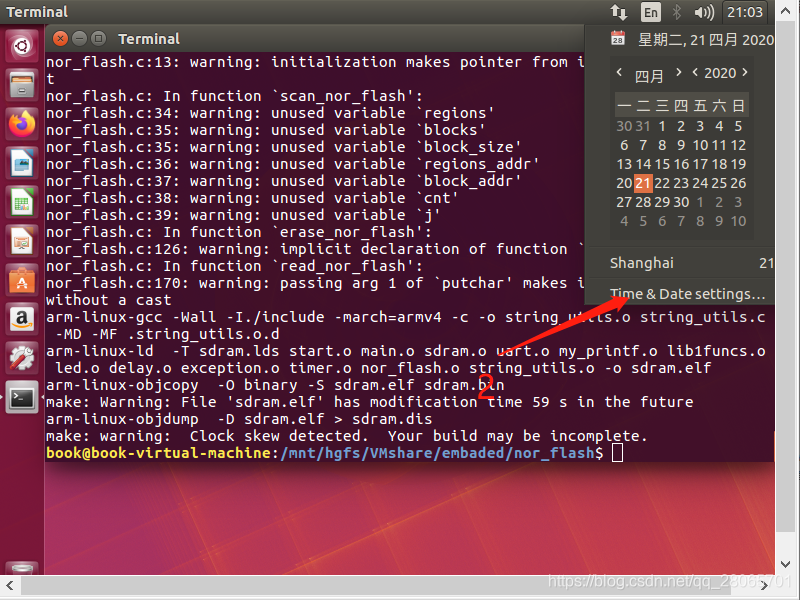
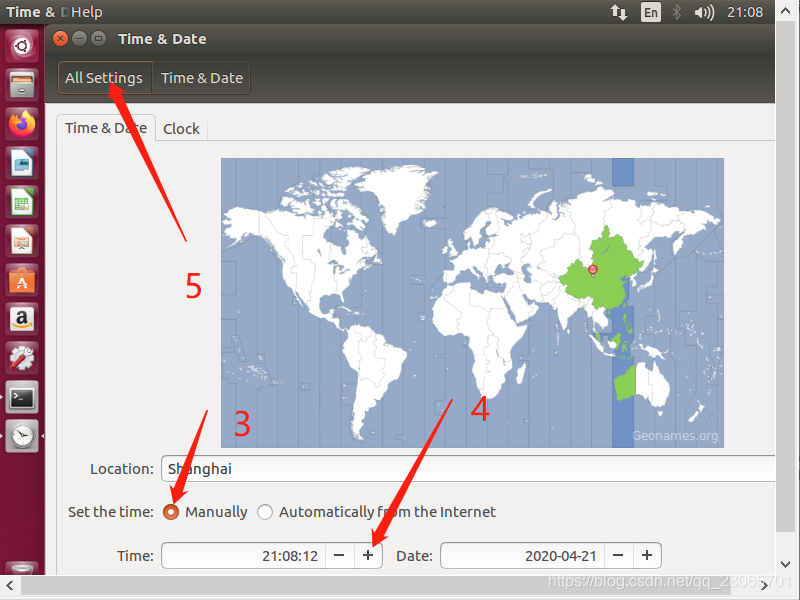
关于ubuntu虚拟机编译程序时报make: warning: Clock skew detected. Your build may be incomplete.问题的解决办法: 我在ubuntu虚拟的arm-linux-gcc上编译程序时老是报make: warning: Clock skew detected. Your build may be incomplete.,很恼火。 这是由于系统时间比文件修改时间早引起的,就是你在用windows和虚拟机的共享文件夹存放文件,在windows下编辑文件,但是你的windows时间要比ubuntu上的时间数字大,等你在ubuntu下make的时候ubuntu系统时间还没有到达文件修改后保存时的标记时间,就导致以上错误的产生。