一、电脑设置
系统默认安装了Win10。由于win10系统UEFI的限制,其他系统无法加载。因此要装双系统,必须先把UEFI模式改成Legacy模式,并将Security Boot 改为Disabled。具体操作如下:
1.电脑开机之后出现机械革命图标时按下F2进入Bios设置界面
2.在“Advanced"->"OS Support"->"Legacy OS";
3."Security"->"Secure Boot"->"Disabled”
4.按F4保存并重启。
二、安装Ubuntu18.04
使用UltralISO制作启动盘,具体制作步骤百度上很多。由于Ubuntu系统中没有Nvidia GTX1050显卡的驱动,若一开始就进入很高分辨率的界面,很容易就卡死。因此要先进入低分辨率模式安装系统,并从PPA存储库中安装显卡驱动(这里最好使用PPA存储库,若使用Ubuntu标准库会出现在登陆界面一直循环,输入了正确的登陆密码后一黑屏又回到原来的登陆界面)。这样Ubuntu系统在使用的时候就不会出现按卡死的情况。安装Ubuntu18.04具体步骤如下:
1.插入启动盘,观察页面左下方。等出现机械革命图标时按下F10进入Boot引导界面。
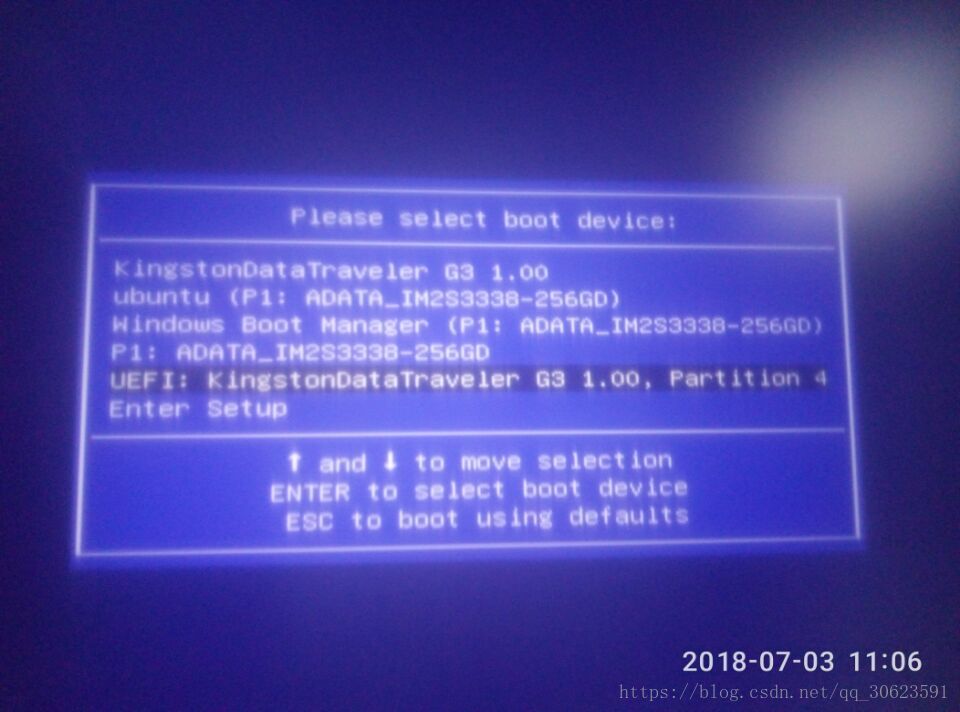
2.选择到制作好的启动盘进入。出现如下界面。
3.按e进入GRUB编辑界面。大概在倒数第二行,将 quiet splash --- 改为 quiet splash nomodeset。按F10进入安装界面。如果看到分辨率比较低,那么就对了,很多人不改这个会卡在选语言那个界面。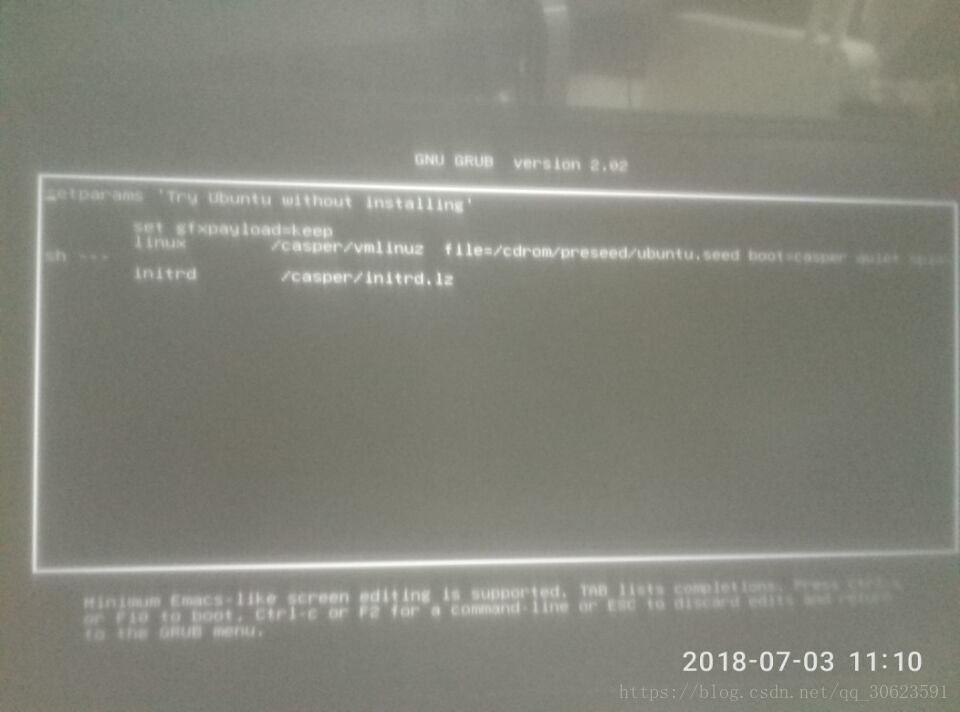
4.在分区那里,默认选择第一个就行。高级分区里边点不到下一步,选了也没用。
5.安装完系统后重启,开机后出现机械革命界面,按F10进入BOOT界面。这时候选择自己安装好的Ubuntu分区进入,而不是U盘启动盘进入。
6.和第三步类似,按e进入GRUB编辑界面。大概在倒数第二行,在quiet splash $vt_handoff 前面加入 nomodeset。如下图所示。按F10以低分辨率进入Ubuntu系统,安装Nvidia显卡驱动。
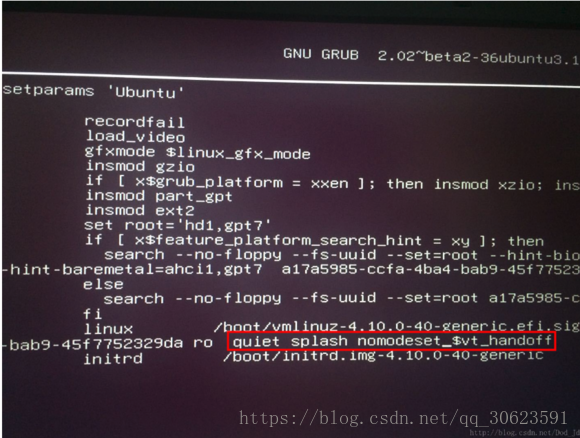
具体安装步骤见:https://linuxconfig.org/how-to-install-the-nvidia-drivers-on-ubuntu-18-04-bionic-beaver-linux
三、设置Ubuntu引导启动。
安装好Ubuntu系统和显卡驱动后重启电脑。按F2进入Bios,将Ubuntu启动放在Windows前面,由Ubuntu引导启动。具体步骤如下:
1.开机出现机械革命标志时按下F2,进入bios。
2.“Boot"->"UEFI Hard Disk Drive BBS Priorities"。将Ubuntu放到Windows上面,按F4保存重启即可。
参考文献:http://tieba.baidu.com/p/5738925296
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)