Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
APM日志格式表
2023-05-16
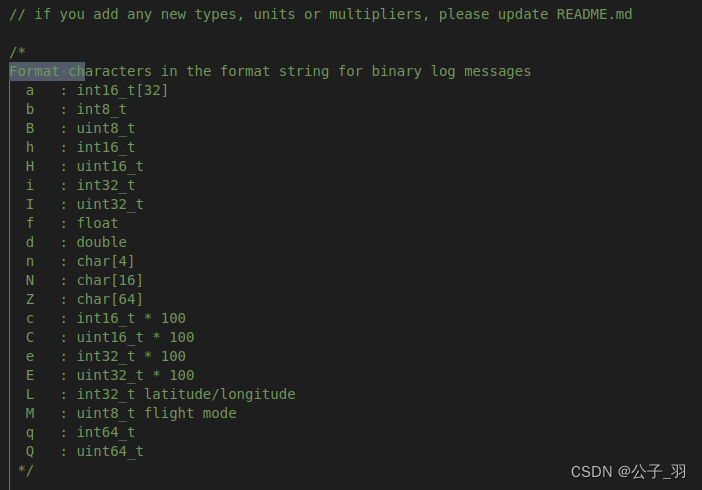
APM的日志格式文件在libraries/AP_Logger/LogStructure.h文件中,二进制数据类型对照表如下:
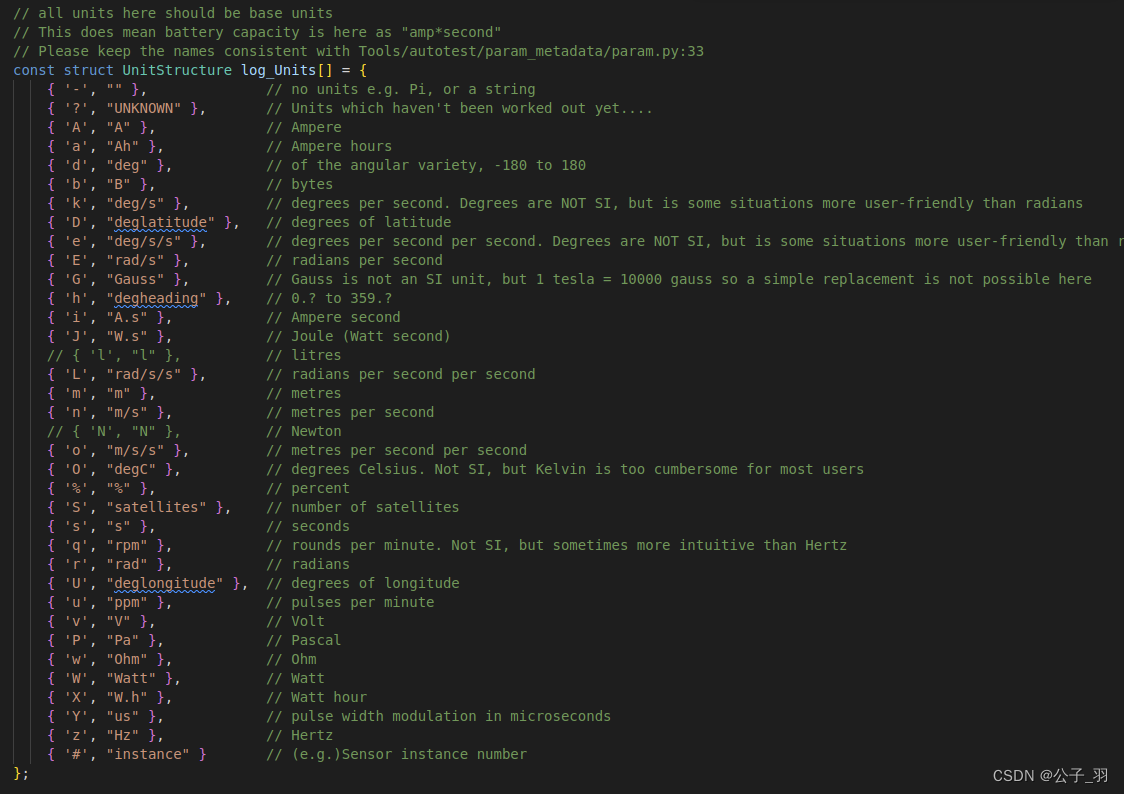
单位对照表如下:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
APM
日志格式表
APM日志格式表 的相关文章
从APM源码分析GPS、气压计惯导融合
最近事多 xff0c 忙着开源自研飞控 xff0c 现主要工作基本已经完成 xff0c 代码最迟下月中旬开放 xff0c 博客来不及更新 xff0c 还请各位见谅 xff0c 后面会抽空多更的咯 xff01 xff01 xff01 自研飞控
APM_ArduCopter源码解析学习(四)——IMU
APM ArduCopter源码解析学习 xff08 四 xff09 IMU 前言一 system cpp 1 1 无人机内部初始化1 2 Copter init ardupilot 1 3 Copter startup INS groun
pixhawk(APM)重刷固件后需要做的事情(亲测)
选机型 xff08 不然最后你都校准完也解锁不了 xff0c 电调会一直叫 xff0c 也没法进行电调校准 xff0c 刚刚发现机架类型一设置好 xff0c 电调立马就不叫了 xff0c 说明设置好机型电调就立马有信号了 xff09 地面站
PX4和ardupilot(APM)的对比
经常看见有人在群里问这个 1 APM历史要远长于PX4 xff0c 因此功能更丰富 xff0c 经历的坑也更多 xff0c 填的坑也更多 xff0c 因此有 功能完善 运行稳定 的优势 xff08 这里的稳定指的是由于程序问题莫名其妙炸机的
pixhawk(APM)与树莓派的接线
当然我之前也专门写过TX2 树莓派和pixhawk的接线 xff0c 但那时默认用的PX4固件 xff0c 这回是APM固件 见https blog csdn net sinat 16643223 article details 10776
这里看到一个说APM对mavros支持不是特别好
这里看到一个说APM对mavros支持不是特别好 https blog csdn net qq 29573053 article details 72518302 utm medium 61 distribute pc relevant t
从APM源码分析GPS、气压计惯导融合
最近事多 xff0c 忙着开源自研飞控 xff0c 现主要工作基本已经完成 xff0c 代码最迟下月中旬开放 xff0c 博客来不及更新 xff0c 还请各位见谅 xff0c 后面会抽空多更的咯 xff01 xff01 xff01 自研飞控
APM无人机软件在环仿真环境搭建
题记 xff1a 最近做毕业设计得用到无人机仿真 xff0c 重操旧业 xff0c 搞一搞SITL仿真 给个传送门参考 xff1a 无人机SITL仿真 APM软件在环仿真 我的环境 xff1a ubuntu18 04虚拟机 1 官方教程 a
富斯FS-T6 APM飞控四种飞行模式设置方法_MIX混控设置
来源于5iMX论坛的这篇帖子 富斯FS T6 APM飞控两种飞行模式设置方法点击打开链接 但是我按照作者的设置MIX的方法 xff0c 怎么都只有三种通道 先上图吧 xff1a 1 我的混控设置 xff1a OFFSET是偏移量 xff0c
APM_ArduCopter源码解析学习(一)——ArduCopter主程序
ArduCopter源码解析学习 xff08 一 xff09 ArduCopter主程序 前言一 准备工作二 Copter cpp解析 2 1 scheduler table2 2 scheduler get scheduler tasks
ArduPilotMega (APM) 是市面上最强大的基于惯性导航的开源自驾仪
http bbs loveuav com thread 54 1 1 html ArduPilotMega APM 是市面上最强大的基于惯性导航的开源自驾仪 特性包括 免费开源固件 xff0c 支持飞机 xff08 34 ArduPlane
使用VSCode打造APM飞控的编译+烧录+调试一体的终极开发环境
日期 xff1a 2019 05 08 前言 APM xff08 Ardupilot xff09 和PX4是当今世界上最为流行和活跃的两大开源飞控软件项目 xff0c 它们均在Linux下基于gcc编译工具链开发 xff0c 对于那些习惯与
APM 新版电机电调校准
旧版的APM电机电调校准需要将油门开到最大后给飞控上电 xff0c 使飞控黄灯常亮后断电 xff0c 继续保持最大油门再给飞控上电 xff0c 听到嘀嘀嘀三声后表示收到遥控器最大油门信号 xff0c 之后再将油门打到最低 xff0c 听到滴
APM-SITL Gazebo MAVROS 仿真
1 配置APM SITL环境 1 下载安装Ardupilot 参考链接 xff1a 官方教程 注意 xff1a 文件install prereqs ubuntu sh路径在 ardupilot Tools environment insta
烧写APM板的bootloader
所需工具材料 xff1a 1 一个AVRusbasp编程器以及相应的烧写软件 xff0c 推荐progisp1 72下载链接https download csdn net download sky7723 12477620 2 AVR的US
APM添加超声模块及定高程序分析
给飞控添加新的模块 xff0c 通常的做法是写驱动文件 xff0c 然后用uORB订阅消息 xff0c 这种方法已经有文章介绍了 xff0c 下面介绍另一种更加简洁的方法 硬件连接 UARTD xff08 ttyS2 xff09 超声 Bo
基于apm、pix无人坦克、无人车自动控制与自动驾驶教程
基于apm pix无人坦克 无人车自动控制与自动驾驶教程 目前玩无人机的玩家较多 xff0c 但是无人车 无人机坦克的玩家少之又少 xff0c 本人经过一段时间的琢磨 xff0c 实现了无人车与无人坦克自动控制 xff0c 自动驾驶 xff
APM飞控学习之路:4 源码裁剪与下载
月盈则亏 xff0c 水满则溢 当博主编译完成 xff0c 以为离成功更近一步准备下载的时候 xff0c 殊不知陷阱也早已准备好 xff0c 等待我的踏入 连上USB线 xff0c 下载 xff0c timeout xff0c timeou
ArduPilot/APM源码学习笔记(一)
最近开始学习ArduPilot APM飞控的源码 xff0c 源码托管在github上 源码链接 xff1a https github com diydrones ardupilot 飞控主页 xff1a http ardupilot co
APM中电机输出分析
一 APM类分析 老规矩 xff0c 先上类图 xff08 1 xff09 如图 xff08 1 xff09 所示 xff0c AP Motors是大部分电机类的父类 xff0c 是AC AttitudeControl姿态控制类的保护型成员
随机推荐
C++问题及解决记录
目录 1 xff0c 无法include问题 2 xff0c c 43 43 多线程如何调试 3 opencv两个mat 相减 xff0c 从数学计算上不应为0 xff0c 但是结果为0 4 代码正确但是还是报错的问题 1 xff0c 无法
freertos任务管理
TODO xff08 未完待续 xff09 核心调度器的调度实现部分介绍完成时间片的处理介绍完成任务切换处理介绍完成空闲任务未完成定时器任务未介绍完成通信方式实现未介绍完成 freertos概述 freertos属于小系统实时操作系统 xf
docker build
docker build命令会根据Dockerfile文件及上下文构建新Docker镜像 构建上下文是指Dockerfile所在的本地路径或一个URL xff08 Git仓库地址 xff09 构建上下文环境会被递归处理 xff0c 所以 x
FreeRTOS任务间通信方式——队列
一 三种任务调度方式 优先级抢占式调度 每个任务都赋予了一个优先级每个任务都可以存在于一个或多个状态在任何时候都只有一个任务可以处于运行状态调度器总是在所有处于就绪态的任务中选择具有最高优先级的任务来执行 选择任务优先级 这种任务调度方式是
改变ros bag 中消息的frame_id 和话题名
1 改变话题名 参考链接 https blog csdn net ethan guo article details 80262650 rosbag play file bag foo 61 bar foo是原topic xff0c bar
ROS下单目相机标定过程
下面简单记录一下我利用ros标定相机参数的过程 xff0c Ubuntu 16 04 xff0c 摄像头用的罗技C920 ROSwiki有相机矫正的官方文档 xff0c 有单目的也有立体相机的教程 xff0c 建议直接看原文 xff0c 原
ADC与DMA回顾
12位ADC是一种逐次逼近型模拟数字转换器 它有多达18个通道 xff0c 可测量16个外部和2个内部信号源 各通道的A D转换可以单次 连续 扫描或间断模式执行 ADC的结果可以左对齐或右对齐方式存储在16位数据寄存器中 ADC 的输入时
C++实现rviz 2D Pose Estimate 功能设置机器人初始坐标
1 首先查看设置初始坐标的话题 为 intialpose xff0c 查看消息类型和格式从而决定怎么给它发数据 xff08 1 xff09 首先打开一个可以自动导航的项目文件 xff0c 打开rviz xff0c 点击2D Pose Est
PHPWord 导出模版Word文件,无法打开,提示xml pasring error
最近在处理网站批量导出模版word时 xff0c 遇到一个问题 xff1a 网站是用PHP语言编写的 xff0c 导出模版word xff08 即将用户填写内容动态的插入word相应位置 xff0c 生成 doc或 docx文件 xff09
windows多线程分析——Semaphore(信号量)
Semaphore相当于升级版的Mutex xff0c 因为当CreateSemaphore NULL 1 1 NULL 中第三个参数为1时 xff0c 就相当于是在CreateMutex 看一个CreateSemaphore NULL 1
windows下的tensorflow安装教程
转载 xff1a https www cnblogs com lvsling p 8672404 html https blog csdn net Eppley article details 79297503 一 前言 本次安装tenso
TX2学习笔记(1)——NVIDIA Jetson TX2 开箱上电
期待已久的NVIDIA Jetson TX2终于到货了 xff0c 迫不及待拆箱上电学习学习 xff01 第一次接触这么高配置的板子 xff0c 拆箱上电还是比较束手束脚 xff0c 怕一不小心就弄坏了 xff0c 好在这板子质量确实可以
从零开始Cubemx配置STM32搭载freeRTOS以及lwip实现tcp网络通信(二)
从零开始Cubemx配置STM32搭载freeRTOS以及lwip实现网络通信 引言CubeMX配置以太网以及LWIP实现一个回环功能 xff08 裸机 xff09 ETH配置LWIP配置 CubeMX配置以太网以及LWIP实现一个回环功能
让电脑使用手机的摄像头做直播
一 xff0c 软件准备 xff08 1 xff09 直播软件 xff1a bilibili直播姬 xff08 2 xff09 摄像头工具 xff1a DroidCam xff0c PC端和手机端 xff08 提取码 xff1a 43n1
pixhawk 开发日记--开发环境搭建
我用的是Ubuntu20 04 一 源码下载 编译 烧写 1 下载源码 git clone https github com PX4 PX4 Autopilot git recursive 2 下载子仓库代码 git submodule u
APM中SBUS信号解析
一 SBUS信号概述 SBUS信号以串口传输 xff0c 波特率为100000bps 每2ms一帧 xff0c 一帧25个字节 其中第0字节为起始帧 xff0c 固定为0x0F 第24字节为帧尾 第1 22字节为1 16比例通道数据字节 第
使用simulink分析APM日志信息
一 将bin转化成mat文件 使用mission planner将bin文件转化成mat文件 二 将工作区变量转化成timeserial对象 RCIN TimeSerial 61 timeseries RCIN 3 RCIN 2 1e6 三
Alexa The required native libraries are named “libvlc.dll”
The required native libraries are named 34 libvlc dll 34 and 34 libvlccore dll 34 In the text below lt libvlc path gt re
APM 新版电机电调校准
旧版的APM电机电调校准需要将油门开到最大后给飞控上电 xff0c 使飞控黄灯常亮后断电 xff0c 继续保持最大油门再给飞控上电 xff0c 听到嘀嘀嘀三声后表示收到遥控器最大油门信号 xff0c 之后再将油门打到最低 xff0c 听到滴
APM日志格式表
APM的日志格式文件在libraries AP Logger LogStructure h文件中 xff0c 二进制数据类型对照表如下 xff1a 单位对照表如下 xff1a
热门标签
修改安兔兔信息
安兔兔显示信息
java开发模板
usb权限
默认授予usb权限
usb授权
教师组
数据全生命周期管理
数据标准管理
网络核心
传播时延
传输时延
中职组
小狗写作
英语笔记
无人值守
边缘计算网关
5G网关
虚幻教程
网盘设计
业财融合
懒人精灵
智能会计